一种随动式试验船模运动姿态控制机构
本发明属于船舶与海洋工程,具体涉及一种随动式试验船模运动姿态控制机构。
背景技术:
1、随着航运业的快速发展,现代船舶需要适应在复杂海况下的航行,相对应的船模耐波性试验对于复杂波浪环境下的试验模拟要求也越高。在波浪水池试验中,船舶的实际摇荡运动共有6个自由度,分别为纵荡、横荡、垂荡、横摇、纵摇以及首摇。其中,船模的纵荡、横荡以及首摇运动没有回复力作用,需要人为的施加回复力以确保试验船模不会出现偏航的情况。
2、在船模尾部添加自动舵系统进行航向角的修正是一种方式,但是自动舵的回复周期太长,无法有效应用于有限大小的室内试验水池中,另外自动舵无法在零航速下进行修正,这进一步增加了其局限性。另外一种方法是通过弹簧连接模型,通过弹簧的拉伸提供的回复力对模型的纵荡、横荡以及首摇运动进行控制。其中一种做法是在模型的首尾分别布置两根斜拉弹簧,这种方式的弊端是会产生较大的纵顷以及首摇力矩,影响模型实际的纵摇效应。另外一种做法是利用现有的适航仪对船模的运动进行限制,但是现有的技术成熟的四自由度、五自由度适航仪往往会将模型一个或两个的运动自由度锁死,这样对于模型其他的运动响应也会有较大的影响。随着对试验模拟逼真度以及试验稳定性要求的不断提高,耐波性试验中传统的对于模型运动姿态的控制方法越来越难以满足实际需求。
技术实现思路
1、本发明的目的在于提供一种够释放试验船模全部的六个自由度的摇荡运动的随动式试验船模运动姿态控制机构。
2、本发明的目的通过如下技术方案来实现:
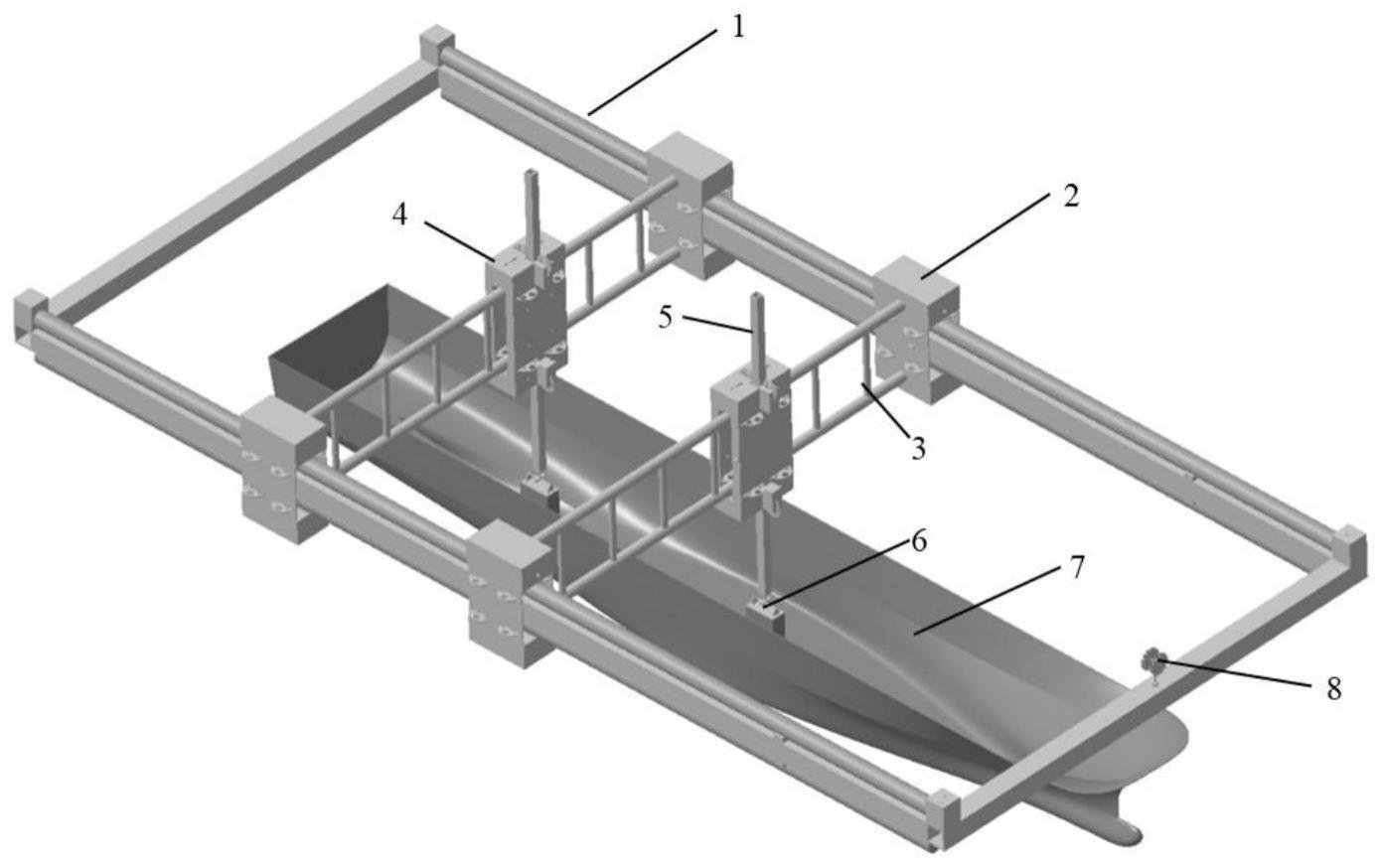
3、一种随动式试验船模运动姿态控制机构,包括纵向导轨、纵向运动平台、横向导轨、横向运动平台、矩形长杆、转向连接装置、试验船模、细钢丝绳收束装置、纵向移动平台前挡板、纵向移动平台顶部挡板、纵向移动平台侧挡板、纵向移动平台水平导向轮、纵向移动平台垂直导向轮、钢丝绳固定点、横向运动平台前挡板、横向运动平台侧板、横向运动平台顶部挡板、横向运动平台水平导向轮、横向运动平台垂直导向轮、矩形长杆纵向导向轮、矩形长杆横向导向轮、长杆连接平板、首摇转动轴套、纵摇转动轴套、横摇转动轴套、十字圆杆、船模连接平板、横摇转轴立板、纵摇转轴立板、导向槽、细钢丝绳、纵向运动回复弹簧、横向运动回复弹簧;
4、控制机构基础是一个矩形框架,在矩形框架的两个长边上安装有圆杆构成的纵向导轨,纵向导轨上安装有沿导轨移动的纵向运动平台;在纵向运动平台的一端连接有细钢丝绳,细钢丝绳经过纵向导轨端部的导向槽之后与布置在矩形框架横杆上的纵向运动回复弹簧连接,纵向运动平台移动拉拽纵向运动回复弹簧进而产生反向的拉力,达到释放纵向运动平台的纵向运动自由度并对其提供稳定的纵向回复力的目的;
5、在矩形框架每一侧的纵向导轨上安装有一前一后共两个能独立纵向移动的纵向运动平台,每个平台均与另一侧纵向导轨上的平台用圆长杆组成的横向导轨连接;在每一个横向导轨上,都安装有一个能沿横向导轨独立移动的横向运动平台;在横向运动平台与纵向运动平台之间采用横向运动回复弹簧接,横向运动平台移动拉拽弹簧进而产生反向的拉力,达到释放横向运动平台的横向运动自由度并对其提供稳定的横向回复力的目的;
6、在每个横向运动平台的一侧安装有一根垂直贯穿平台的矩形长杆,矩形长杆被四对导向轮限制了其相对横向运动平台在水平方向的位移,只能相对于横向运动平台进行垂向运动;矩形长杆下端安装有转向连接装置,能够同时释放连接点处的横摇、纵摇与首摇这三个方向的旋转运动。
7、本发明还可以包括:
8、1.所述纵向导轨是由布置在纵向矩形框架上、下边的两根相同尺寸的圆杆共同组成;安装在纵向导轨上的独立移动的纵向运动平台上共设置有五对导向轮,其中四对纵向移动平台水平导向轮水平布置,与纵向导轨的圆杆线接触用来限制纵向运动平台与纵向导轨在横向上的位置变化;一对纵向移动平台垂直导向轮垂直布置,与纵向导轨的圆杆圆轨线接触用来限制纵向运动平台与纵向导轨在垂向上的位置变化;使纵向导轨上的纵向运动平台只能沿导轨移动。
9、2.所述横向导轨是由上下两个横向布置的圆截面长杆组成,上下两根圆杆之间采用间隔布置的垂向细杆连接用来提升横向导轨的整体结构强度;安装在横向导轨上独立移动的横向运动平台上设置有六对导向轮,其中四对横向运动平台水平导向轮水平布置,与横向导轨的圆杆线接触用来限制横向运动平台与横向导轨在纵向上的位置变化;两对横向运动平台垂直导向轮垂向布置,与横向导轨的圆杆线接触用来限制横向运动平台与横向导轨在垂向上的位置变化;使横向导轨上的横向运动平台只能沿导轨移动。
10、3.所述矩形长杆下方的转向连接装置,其顶端设置有一个矩形的长杆连接平板,用来与矩形长杆的端部进行刚性连接;长杆连接平板的下方延伸出一个首摇转动轴套,垂向圆轴与水平布置的首摇转动轴套内圈连接,首摇转动轴套的外圈连接的是一对纵摇转轴立板;与纵摇转轴立板连接的是一个十字圆杆在横向上的两个纵摇转动轴套;与试验船模进行刚性连接的是一个纵向布置的水平的船模连接平板,船模连接平板的前后两侧布置有横摇转轴立板,与横摇转轴立板连接的是十字圆杆在纵向上的两个横摇转动轴套;使模型横摇、纵摇以及首摇三个运动自由度的释放。
11、4.所述试验船模中纵剖面上一前一后两个位置与安装在矩形长杆下方的转向连接装置互联;试验船模的纵荡运动会带动横向导轨以及与横向导轨连接的安装在纵向导轨上的纵向运动平台沿着纵向导轨移动;试验船模的升沉运动直接带动矩形长杆在垂向上的运动;试验船模的横荡与首摇运动会带动横向导轨上的横向运动平台移动沿着横向导轨移动,同时试验船模的首摇导致转向连接装置上的水平轴承转动,试验船模的横摇与纵摇运动也相对应的带动转向连接装置中的十字圆杆产生旋转运动;整个姿态控制机构能够完全的释放模型六个自由度的运动,滚动摩擦所产生的弱小的阻力也不会对船模运动的幅度产生大的影响;纵向运动平台和横向运动平台分别连接纵向运动回复弹簧和横向运动回复弹簧,使试验船模在纵荡、横荡以及首摇运动模态上有的回复力以及回复力矩。
12、本发明的有益效果在于:
13、本发明为船模水池试验中没有航线修正能力的试验模型提供了一种随动式运动姿态控制机构。本发明控制机构固定在水池拖车上,控制机构与试验船模相连,因此能够达到拖车、控制机构与模型以同一速度运动的基本要求。当试验在水池中遭遇复杂的波浪环境产生六自由度的摇荡运动时,控制机构中的平台、转向连接装置也会产生相对应的线运动或者角运动,而不会出现将某种运动模式锁死的情况。与纵向平台以及横向平台连接的弹簧会在绷紧的情况下提供平稳的回复力,以对模型的纵荡、横荡以及首摇运动进行回复控制,确保试验船模的航线稳定。同时,将与模型固结的转向连接装置安装在重心高度处,这样可以有效避免回复力对试验模型产生额外的力矩干扰模型在其他自由度的运动响应。
技术特征:
1.一种随动式试验船模运动姿态控制机构,其特征在于:包括纵向导轨(1)、纵向运动平台(2)、横向导轨(3)、横向运动平台(4)、矩形长杆(5)、转向连接装置(6)、试验船模(7)、细钢丝绳收束装置(8)、纵向移动平台前挡板(9)、纵向移动平台顶部挡板(10)、纵向移动平台侧挡板(11)、纵向移动平台水平导向轮(12)、纵向移动平台垂直导向轮(13)、钢丝绳固定点(14)、横向运动平台前挡板(15)、横向运动平台侧板(16)、横向运动平台顶部挡板(17)、横向运动平台水平导向轮(18)、横向运动平台垂直导向轮(19)、矩形长杆纵向导向轮(20)、矩形长杆横向导向轮(21)、长杆连接平板(22)、首摇转动轴套(23)、纵摇转动轴套(24)、横摇转动轴套(25)、十字圆杆(26)、船模连接平板(27)、横摇转轴立板(28)、纵摇转轴立板(29)、导向槽(30)、细钢丝绳(31)、纵向运动回复弹簧(32)、横向运动回复弹簧(33);
2.根据权利要求1所述的一种随动式试验船模运动姿态控制机构,其特征在于:所述纵向导轨(1)是由布置在纵向矩形框架上、下边的两根相同尺寸的圆杆共同组成;安装在纵向导轨(1)上的独立移动的纵向运动平台(2)上共设置有五对导向轮,其中四对纵向移动平台水平导向轮(12)水平布置,与纵向导轨(1)的圆杆线接触用来限制纵向运动平台(2)与纵向导轨(1)在横向上的位置变化;一对纵向移动平台垂直导向轮(13)垂直布置,与纵向导轨(1)的圆杆圆轨线接触用来限制纵向运动平台(2)与纵向导轨(1)在垂向上的位置变化;使纵向导轨上(1)的纵向运动平台(2)只能沿导轨移动。
3.根据权利要求1所述的一种随动式试验船模运动姿态控制机构,其特征在于:所述横向导轨(3)是由上下两个横向布置的圆截面长杆组成,上下两根圆杆之间采用间隔布置的垂向细杆连接用来提升横向导轨的整体结构强度;安装在横向导轨(3)上独立移动的横向运动平台(4)上设置有六对导向轮,其中四对横向运动平台水平导向轮(18)水平布置,与横向导轨(3)的圆杆线接触用来限制横向运动平台(4)与横向导轨(3)在纵向上的位置变化;两对横向运动平台垂直导向轮(19)垂向布置,与横向导轨(3)的圆杆线接触用来限制横向运动平台(4)与横向导轨(3)在垂向上的位置变化;使横向导轨(3)上的横向运动平台(4)只能沿导轨移动。
4.根据权利要求1所述的一种随动式试验船模运动姿态控制机构,其特征在于:所述矩形长杆(5)下方的转向连接装置(6),其顶端设置有一个矩形的长杆连接平板(22),用来与矩形长杆(5)的端部进行刚性连接;长杆连接平板(22)的下方延伸出一个首摇转动轴套(23),垂向圆轴与水平布置的首摇转动轴套(23)内圈连接,首摇转动轴套(23)的外圈连接的是一对纵摇转轴立板(29);与纵摇转轴立板(29)连接的是一个十字圆杆(26)在横向上的两个纵摇转动轴套(24);与试验船模(7)进行刚性连接的是一个纵向布置的水平的船模连接平板(27),船模连接平板(27)的前后两侧布置有横摇转轴立板(28),与横摇转轴立板(28)连接的是十字圆杆(26)在纵向上的两个横摇转动轴套(25);使模型横摇、纵摇以及首摇三个运动自由度的释放。
5.根据权利要求1或4所述的一种随动式试验船模运动姿态控制机构,其特征在于:所述试验船模(7)中纵剖面上一前一后两个位置与安装在矩形长杆(5)下方的转向连接装置(6)互联;试验船模(7)的纵荡运动会带动横向导轨(3)以及与横向导轨(3)连接的安装在纵向导轨(1)上的纵向运动平台(2)沿着纵向导轨(1)移动;试验船模(7)的升沉运动直接带动矩形长杆(5)在垂向上的运动;试验船模(7)的横荡与首摇运动会带动横向导轨(3)上的横向运动平台(4)移动沿着横向导轨(3)移动,同时试验船模(7)的首摇导致转向连接装置(6)上的水平轴承转动,试验船模(7)的横摇与纵摇运动也相对应的带动转向连接装置(6)中的十字圆杆(26)产生旋转运动;整个姿态控制机构能够完全的释放模型六个自由度的运动,滚动摩擦所产生的弱小的阻力也不会对船模运动的幅度产生大的影响;纵向运动平台(2)和横向运动平台(4)分别连接纵向运动回复弹簧(32)和横向运动回复弹簧(33),使试验船模(7)在纵荡、横荡以及首摇运动模态上有的回复力以及回复力矩。
技术总结
本发明提供了一种随动式试验船模运动姿态控制机构。本发明控制机构固定在水池拖车上,控制机构与试验船模相连,因此能够达到拖车、控制机构与模型以同一速度运动的基本要求。当试验在水池中遭遇复杂的波浪环境产生六自由度的摇荡运动时,控制机构中的平台、转向连接装置也会产生相对应的线运动或者角运动,而不会出现将某种运动模式锁死的情况。与纵向平台以及横向平台连接的弹簧会在绷紧的情况下提供平稳的回复力,以对模型的纵荡、横荡以及首摇运动进行回复控制,确保试验船模的航线稳定。同时,将与模型固结的转向连接装置安装在重心高度处,这样可以有效避免回复力对试验模型产生额外的力矩干扰模型在其他自由度的运动响应。
技术研发人员:李辉,邹健,刘宁,任慧龙,冯国庆,孙士丽,李陈峰,周学谦,许维军,刘瑞祥
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!