一种AUV智能运维系统及方法
本发明属于智能运维,具体涉及一种auv智能运维系统及方法。
背景技术:
1、海洋具有十分复杂的环境,海水的温度、盐度及压力都将影响auv外壳等裸露部分的腐蚀,另一方面,长时间的工作会使auv内部结构产生故障,例如电动机的轴承疲劳损伤、蓄电池的容量下降、线路电流电压不稳等等。一旦auv作业时出现故障,轻则花费大量人力物力打捞,重则导致auv遗失,造成巨大损失。因此,对auv进行智能运维管理对于其安全运行,执行任务等具有重要意义。
2、目前,关于auv的智能运维主要依靠事后维修和定期维护,auv出现故障后由于各类故障的特性以及严重性不同,若采用事后维修方法,则容易导致auv在海中遗失,造成损失;若采用定期维护方法,则需要经常对auv进行检修,浪费人力和物资。而基于当前状态的视情维修能够弥补以上的不足,根据当前状态和对未来状态的预测,给出合理的建议,该方法逐渐成为经济有效的主要运维手段。此外,相关学者专家已经提出许多有效的诊断预测方法,但缺乏在auv运维全过程上形成系统的应用。鉴于以上情况,本发明提出一种auv智能运维系统及方法。
技术实现思路
1、针对现有技术中存在的上述技术问题,本发明提供一种auv智能运维系统及方法,设计合理,解决了现有技术的不足,具有良好的效果。
2、为了实现发明目的,采用以下技术方案:
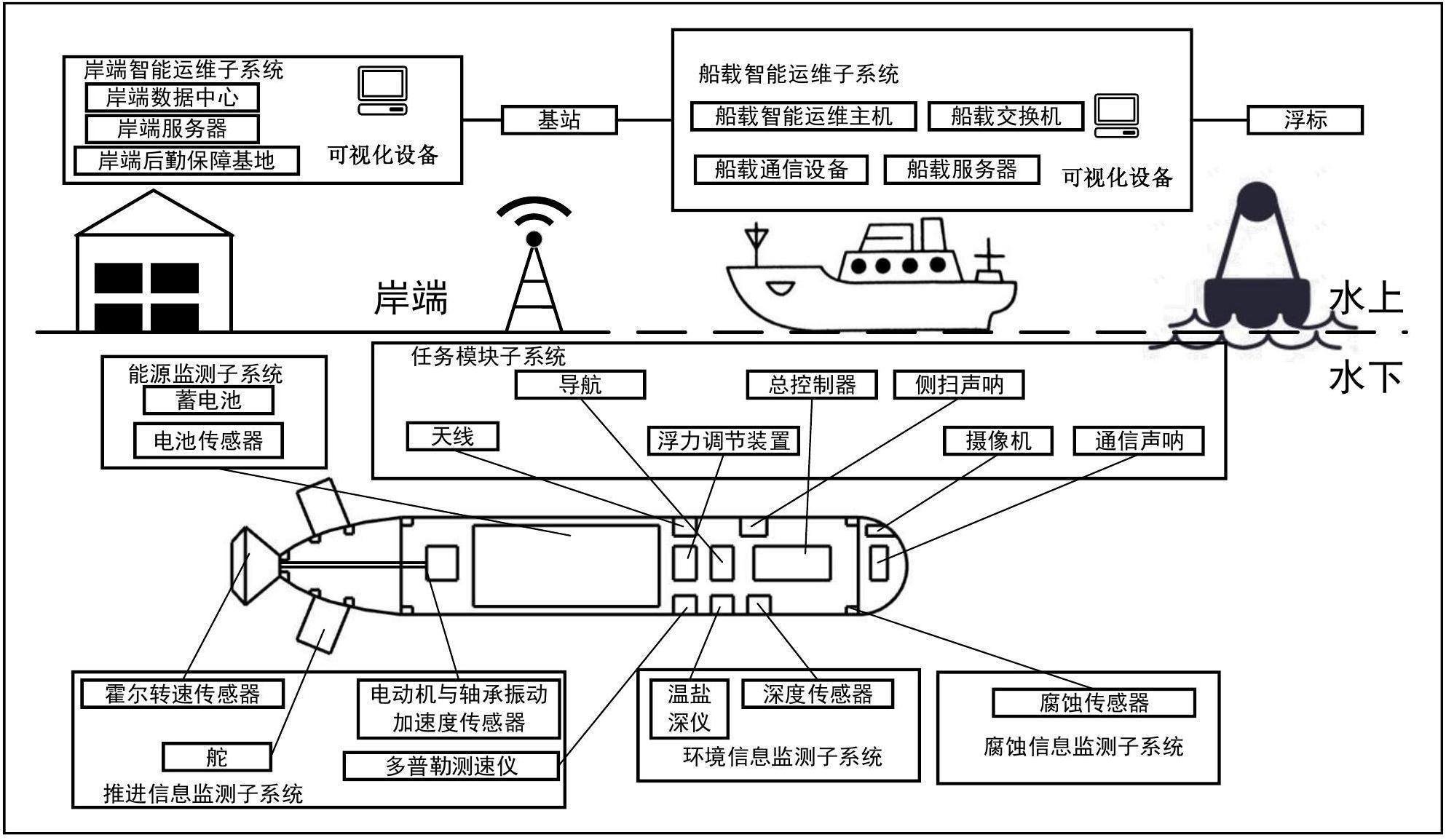
3、一种auv智能运维系统,包括硬件系统,所述硬件系统包括推进信息监测子系统、环境信息监测子系统、腐蚀信息监测子系统、能源监测子系统、任务模块子系统、浮标、船载智能运维子系统、基站、岸端智能运维子系统;
4、推进信息监测子系统,包括霍尔转速传感器、电动机与轴承振动加速度传感器、舵和多普勒测速仪,用于监测螺旋桨转速状态、电动机轴承振动信息、舵的转动信息以及auv的航行速度;
5、环境信息监测子系统,包括温盐深仪和深度传感器,用于测量auv周围水体的温度变化、auv周围水体的盐度、auv周围水体深度,对腐蚀情况提供辅助判断;
6、腐蚀信息监测子系统,包括腐蚀传感器,用于监测各结构之间的连接点处,通过监测外壳表面上的阳极和阴极之间的电位差,实时监测auv外壳结构的腐蚀状况;
7、能源信息监测子系统,包括蓄电池和电池传感器,用于监测电池的电压、电流、温度、容量、电池电量百分比、电池健康状态、充放电速率、循环次数;
8、任务模块子系统,包括天线、导航、浮力调节装置、总控制器、侧扫声呐、摄像机和通信声呐;
9、浮标,负责向auv发送任务信息、导航信息以及定位信息等或接收auv传输的各传感器采集的信息,并通过卫星与海上母船保持通信;
10、船载智能运维子系统,包括船载智能运维主机、船载交换机、船载通信设备、船载服务器以及可视化设备;
11、岸端智能运维子系统,包括岸端数据中心、岸端服务器、岸端后勤保障基地以及可视化设备。
12、进一步地,在所述任务模块子系统中,天线主要负责接收母船或浮标的传输的信息,包括导航信息、定位信息和作业任务信息;导航为auv的导航系统,负责根据其他传感器收集到的环境信息、定位信息等对航行位置进行估计、路径规划、导航决策和控制操作,实现自主导航定位;浮力调节装置通过接收传感器的反馈信息,如auv的深度、姿态等,然后根据预定的控制策略,控制执行器来调整浮力调节装置的体积或密度,从而实现对auv的浮力和浮潜深度的调节;
13、总控制器是auv系统中的核心控制单元,负责对auv的全面管理和控制;
14、侧扫声呐通过发送声波信号并接收其回波,来获取水下目标的信息和图像,是auv的功能任务模块;
15、摄像机负责采集auv工作过程中的视觉信息,用于auv的导航和水中信息采集任务;
16、通信声呐是依据水声通信原理,实时将各传感器采集到的信息按照通信协议传输给最近的接收器。
17、进一步地,在所述船载智能运维子系统中,船载智能运维主机内置lstm预测算法,负责对auv上传数据的进行预测,并判断潜在故障等级;
18、船载交换机实现在船上局域网内不同设备之间的通信;
19、船载通信设备负责与岸端基站、水面浮标和水下auv建立通信联系,负责接收auv传输信息、接收浮标传输的auv运行状态信息,同时负责向auv发送水下作业任务信息或通过浮标间接向auv发送任务信息,以及向岸端基站发送auv运行状态信息、运维需求信息和人员之间建立联系的需求;
20、船载服务器负责船上数据的存储、管理和安全服务以及船上网络服务;
21、可视化设备为船上智慧大屏,实时显示auv工作状态、风险等级、运维需求和决策建议内容。
22、进一步地,在所述岸端智能运维子系统中,岸端数据中心接收陆上基站发送的auv状态信息和运维需求信息,并在岸上开展大数据云计算,提升预测和剩余寿命计算的准确性,同时将运维需求信息发送至岸端服务器,通过互联网向岸端后勤保障基地发送需求,包括管理部门、技术部门、仓库部门、运输部门、设计部门、制造部门,并显示在可视化设备,管理部门根据显示的信息做出人员和物资等的调配管理,技术部门根据预测结果和运维结果对模型、参数等做出调整,仓库部门根据调配任务选取出适用的零件和工具,运输部门根据调配任务做出运输工具的计划安排,设计部门根据故障出现的信息,对auv设计做出适当调整,制造部门根据潜在故障情况,对auv的材料、设备的选择做出调整。
23、进一步地,还包括软件系统,软件系统功能包括数据管理、通信管理和人机交互功能;
24、数据管理功能包括数据存储、数据备份、数据共享、数据保护、数据压缩和数据处理功能;
25、数据存储功能,要求软件系统能够持久保存传感器采集到的数据,即使系统关闭数据也不会丢失;
26、数据备份功能,要求软件系统能够备份和恢复数据,确保数据丢失或系统故障时可以还原数据;
27、数据共享功能,要求软件系统能够允许多个用户或程序同时访问数据,即各运维部门可通过软件系统实现信息共享和协作;
28、数据保护功能,要求软件系统能够给予各运维部门不同的权限和免于外界攻击的能力,给予数据足够的机密性;
29、数据压缩功能,要求软件系统能够减小数据对于存储空间的占用,提高系统的存储能力;
30、数据处理功能要求软件系统能够按照小波包去噪处理方法、小波包能量提取特征方法和lstm预测方法将传感器采集到的数据进行处理,完成智能运维的需求;
31、通信管理功能包括auv、母船、浮标、运维部门四端进行通信的功能,包括发出指令和接收信息,具体表现为auv与母船之间通信、auv与浮标之间通信、母船与浮标之间通信和母船与运维部门之间通信;
32、人机交互功能包括状态显示、状态查询、状态预警、决策建议和工作反馈功能;
33、状态显示功能,要求软件系统能够在人机交互界面上实时显示auv当前各区域的运行状态,包括健康、潜在故障和故障;
34、状态查询功能,要求软件系统能够在人机交互界面上随时支持查询历史数据;
35、状态预警功能,要求软件系统能够在设备出现潜在故障情况时及时向用户提供提示,通知潜在故障所在的auv部位,以及给出该部位的剩余寿命;
36、决策建议功能,要求软件系统能够在人机交互界面向用户提供解决潜在故障的方法和步骤,提供尽可能的文字、图片和视频等多媒体支持,帮助人员解决故障;
37、工作反馈功能,要求软件系统能够在人机交互界面给用户提供填写反馈信息的界面,包括用户对预测结果的确认和用户对建议方法合理性的确认。
38、一种auv智能运维方法,采用如上所述的一种auv智能运维系统,包括以下步骤:
39、s1、auv上搭载的传感器实时采集各区域的运行状态数据;
40、s2、对s1采集的运行状态数据进行处理分析,包括对数据的去噪处理和特征提取;
41、s3、基于lstm长短期记忆递归神经网络建立状态识别模型,对当前状态进行评估和预测分析,并根据预测结果计算剩余寿命;
42、s4、安排运维人员的作业任务计划,调遣仓库中与需要维护区域相关的零件和工具,筛选出当前需要维护区域的故障维修知识;
43、s5、参与维修的人员填写维修日记,包括预测结果的准确性、维修知识库指导内容的正确性以及现场处置中出现的意外情况。
44、进一步地,在s2中,所述去噪处理采用小波包去噪,包括以下子步骤:
45、s21、利用小波包分解,将信号分解成低频和高频部分:
46、;
47、其中,表示原信号;表示分解后的子信号;表示小波变换操作符;
48、s22、选用db4小波基函数进行小波变换操作:
49、;
50、其中,是db4小波基函数在时间域上的函数表示,表示时间变量;
51、s23、对每个子信号进行软阈值处理:
52、;
53、其中,表示阈值处理后的系数;表示分解后的子信号;是的符号函数;代表阈值;
54、s24、小波包重构:将经过阈值处理的子信号进行逆变换,将其合成为去噪后的信号,表示为:
55、;
56、其中,表示去噪并重构后的信号;表示小波包逆变换操作符;
57、运用小波包能量法对特征进行提取,表示为:
58、;
59、其中,表示小波包的能量,表示小波包系数,表示小波包的尺度或频率,表示小波包的平移或时间。
60、本发明带来的有益技术效果:
61、采用本发明的auv智能运维方法及系统,通过对auv传感器采集数据的预测分析,预知到auv的潜在故障,为auv执行科考任务、勘探任务以及军事任务提供了保障,同时,配套的运维流程提高了auv的检修效率,最大化节省不必要的时间和物资浪费,降低了各种额外的经济费用。
- 还没有人留言评论。精彩留言会获得点赞!