一种柴电混合动力船舶的能量管理方法及装置与流程
本发明实施例涉及船舶,尤其涉及一种柴电混合动力船舶的能量管理方法及装置。
背景技术:
1、在混合动力船舶领域中,柴电混合动力技术受到越来越多的关注。由于柴电混合动力船舶,具有结合电机调速性能好,过载能力强、效率高等优点和柴油机热效率高、低速大扭矩、安全性能高等优点,通过齿轮箱的动力耦合输出扭矩,共同驱动螺旋桨,体现混合动力“双机互补”理念。
2、能量管理控制策略是混合动力整船控制系统的核心内容,是实现整船性能优劣的关键。在满足船舶动力性的基础上使整船燃油消耗降到最低是柴电混合动力船舶能量管理策略优化的核心思想,在满足约束条件的前提下,找到一组最优扭矩使系统目标函数值最小。其优化问题实质上描述为根据船舶需求功率,对电机功率和柴油机功率实现最优化分配。等效燃油消耗最小策略(equivalent consumption minimum strategy,ecms)主要原理是构建每个瞬时电池等效燃油消耗与柴油机燃油消耗相加后总燃油消耗量最低的瞬时目标函数,运用智能优化算法使目标函数始终保持最小,同时需要优化工作模式和工作点。柴电混合动力船舶(diesel electric hybrid ship,dehs)中电池作为能量缓冲器,在需求功率较小时由柴油机对消耗的部分能量进行补充,在需求功率较大时分担柴油机部分功率负载。当柴油机控制模块等效因子过大时,柴油机控制模块倾向于对动力电池进行充电,然后在大部分航程中以仅燃油模式运行。在这种情况下,ecms策略将强制使用柴油机驱动模式,因为使用电能会显著增加成本。ecms算法一般应用在电量维持型dehs中,要求减小电池初始soc值与最终soc值偏差,从而将电池荷电状态(state of charge,soc)控制在一定约束范围内。
3、现阶段其能量管理策略分基于规则、优化控制和智能控制算法的船舶能量管理策略三类目前基于规则的(charge depleting/charge sustaining,cd-cs)能量管理具有良好的实时性,简单容易实现,在混合动力汽车领域中应用的比较多,在混合动力船舶领域应用相对较少,但其存在明显的不足,对工程技术人员经验要求较高。现有的采用ecms对柴电混合动力船舶进行能量管理的方法,但由于ecms策略实时性差,很难广泛在工程应用。在柴电混合动力领域很少有能量管理方法同时考虑ecms策略实时性差和电池初始soc值与最终soc值偏差大问题。
技术实现思路
1、本发明实施例提供一种柴电混合动力船舶的能量管理方法及装置,以解决ecms策略实时性差,柴油机和电机的工作效率不高,导致船舶的燃油经济性差以及电池初始soc值与最终soc值偏差大问题。
2、为实现上述技术问题,本发明采用以下技术方案:
3、本发明实施例提供了一种柴电混合动力船舶的能量管理方法,包括:
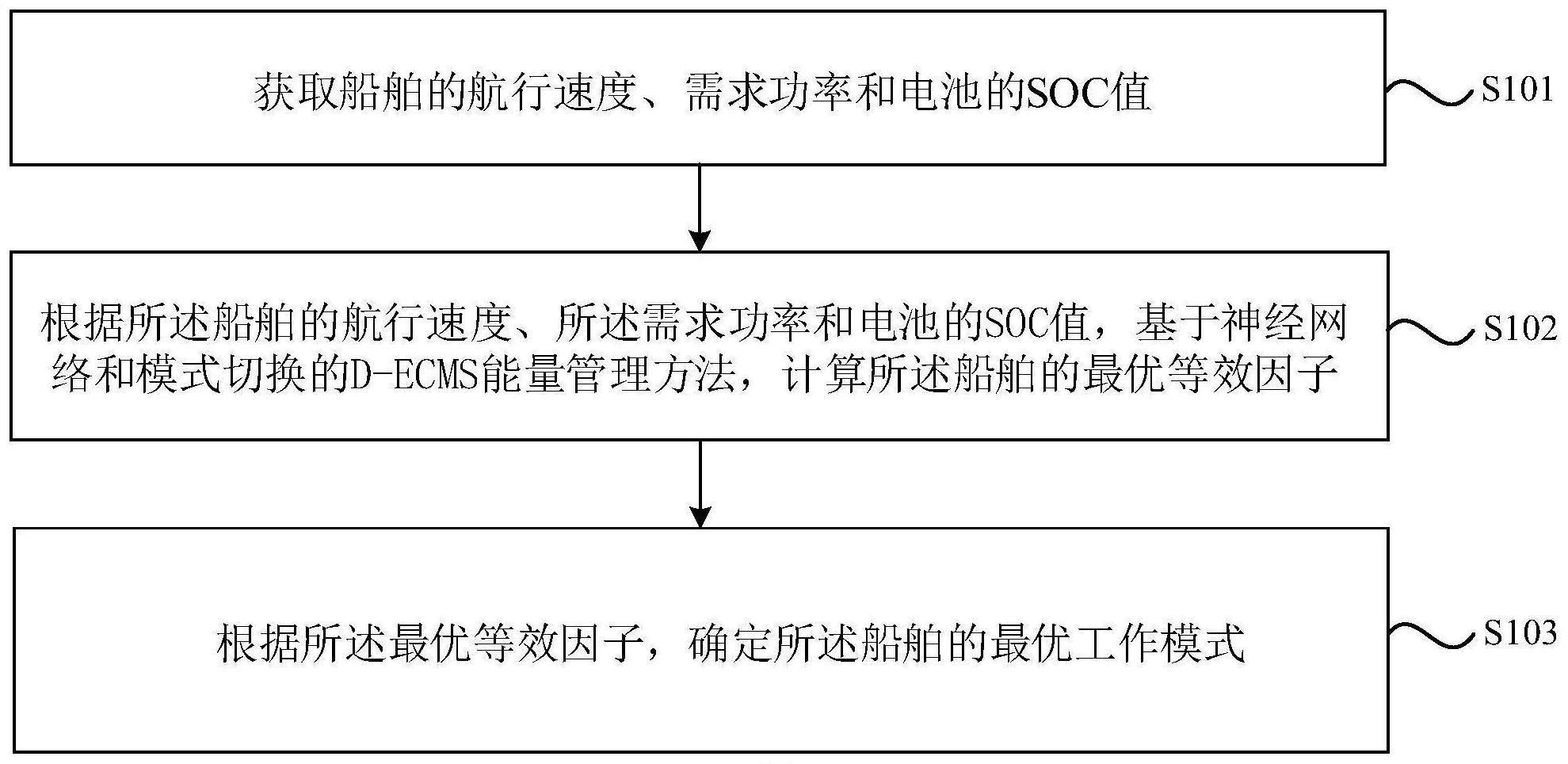
4、获取船舶的航行速度、需求功率和电池的soc值;
5、根据所述船舶的航行速度、所述需求功率和电池的soc值,基于神经网络和模式切换的d-ecms能量管理方法,计算所述船舶的最优等效因子;
6、根据所述最优等效因子,确定所述船舶的最优工作模式。
7、可选的,所述根据所述船舶的航行速度、所述需求功率和电池的soc值,基于神经网络和模式切换的d-ecms能量管理方法,计算所述船舶的最优等效因子,包括:
8、根据所述船舶的航行速度、需求功率和电池的soc值,基于粒子群优化神经网络和模式切换的d-ecms能量管理方法,计算所述船舶的各工作模式的等效油耗;
9、根据所述船舶的各工作模式的等效油耗,确定所述船舶的最优等效因子;其中,所述船舶的工作模式包括:纯电动驱动模式、柴油机单独驱动模式、柴油机驱动发电机模式和混合驱动模式。
10、可选的,所述根据所述船舶的航行速度、需求功率和电池的soc值,基于粒子群优化神经网络和模式切换的d-ecms能量管理方法,计算所述船舶的各工作模式的等效油耗,包括:
11、基于自适应粒子群算法,对神经网络的初始权值进行训练,优化神经网络的初始权值,输出粒子群优化权值;
12、采用所述粒子群优化权值,基于神经网络的滑模自适应控制算法,根据所述船舶的航行速度、所述需求功率和所述电池的soc值,计算所述船舶的各工作模式的等效油耗。
13、可选的,所述采用所述粒子群优化权值,基于神经网络的滑模自适应控制算法,根据所述船舶的航行速度、所述需求功率和所述电池的soc值,计算所述船舶的各工作模式的等效油耗,包括:
14、采用自适应变异优化粒子群算法对预设粒子进行变异,使粒子跳出局部最优解,获得全局最优解;
15、基于全局最优解,采用两个神经网络控制器,对所述船舶的航行速度和电池的soc值进行滑模切换控制与滑模等效控制,通过神经网络滑模自适应控制器输出所述船舶的各工作模式的等效油耗。
16、可选的,所述根据所述船舶的各工作模式的等效油耗,确定所述船舶的最优等效因子,包括:
17、对所述船舶的各工作模式的等效油耗取最小值;
18、将所述等效油耗的最小值,作为所述船舶的最优等效因子。
19、可选的,根据所述最优等效因子,确定所述船舶的最优工作模式,包括:
20、根据所述船舶的最优等效因子和所述电池的soc值,调节燃油与电能之间效率转换的等效因子;
21、根据所述等效因子,确定所述船舶的最优工作模式。可选的,所述基于自适应粒子群算法,对神经网络的初始权值进行训练,优化神经网络的初始权值,包括:
22、对所述粒子的位置和速度初始化,其中,种群的每一个粒子的位置均表示神经网络的初始权值,神经网络中起连接作用的权值数量决定每个粒子的维数;所述神经网络的权值为粒子群位置向量的元素;
23、根据粒子群位置向量和训练随机样本,计算所述粒子的适应度值;
24、更新粒子的位置和速度,并根据所述粒子的适应度值确定所述粒子的个体极值和整体极值;
25、根据所述粒子的个体极值和整体极值,选取优化初始权值作为所述神经网络的初始权值。
26、可选的,所述根据所述粒子的个体极值和整体极值,选取优化初始权值,作为所述神经网络的初始权值,包括:
27、根据所述粒子的个体极值和整体极值,更新种群的适应度方差,并更新粒子的自适应权重;
28、根据更新后的所述自适应权重,更新粒子的位置和速度,并输出优化结果。
29、可选的,所述根据更新后的所述自适应权重,更新粒子的位置和速度,并输出优化结果,包括:
30、根据更新后的所述自适应权重,生成随机数;
31、将所述随机数与预设概率参数进行比较,生成比较结果;
32、当所述随机数大于所述预设概率参数时,对群体极值进行变异操作,并计算所述粒子的当前适应度值;
33、根据所述粒子的当前适应度值,更新粒子的位置和速度;
34、将更新后的所述粒子的位置和速度与预设最终条件进行比较,根据比较结果输出优化结果。
35、根据本发明的另一方面,本实施例提供一种柴电混合动力船舶的能量管理装置,包括:
36、获取模块,用于获取船舶的航行速度、需求功率和电池的soc值;
37、计算模块,用于根据所述船舶的航行速度、所述需求功率和电池的soc值,基于神经网络和模式切换的d-ecms能量管理方法,计算所述船舶的最优等效因子;
38、模式确定模块,用于根据所述最优等效因子,确定所述船舶的最优工作模式。
39、本发明实施例提供的柴电混合动力船舶的能量管理方法,通过获取船舶的航速、需求功率和电池的soc值信息。并根据船舶的航速、需求功率和电池的soc值,基于粒子群优化神经网络同时考虑模式切换的d-ecms能量管理方法,计算船舶的最优等效因子。然后,根据最优等效因子,确定所述船舶的最优工作模式。这样设计实现了根据船舶的电池的soc值以及船舶需求功率,确定船舶不同工作模式下的最优等效因子,一方面提高了d-ecms策略实时性,另一方面,降低了船舶的燃油消耗量。
- 还没有人留言评论。精彩留言会获得点赞!