一种无人船自适应动力装置
本发明涉及动力装置,特别涉及一种无人船自适应动力装置。
背景技术:
1、无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,可以代替人工在水面位置完成打捞等作业项目,在无人船的使用时,自身都携带动力装置,确保自身能正常工作。
2、申请号:cn200510027565.x公开了一种属于海洋工程技术领域的基于模糊自适应算法的船舶动力定位控制系统,本发明包括:计算机、电位放大器、模拟/数字转换器、数字/模拟转换器、滤波器、测位系统、执行机构、学习器、优化决策器,测位系统设在船上,测位系统的信息输出连接到模拟/数字转换器输入端,模拟/数字转换器输出端连接到计算机,计算机再与滤波器输入端连接,滤波器输出端经学习器、优化决策器接到电位放大器输入端,电位放大器输出端接到执行机构。本发明能自适应于船的装载变化及海况变化,提高动力定位精度,大大降低定位能耗的前馈式动力定位。
3、基于上述专利的检索及对现有无人船自适应动力装置的应用了解:目前的无人船驱动动力在通过自适应算法进行调校的时候,只是提高自适应动能的定位精度,然而在无人船在水面使用状态时,无人船的动能驱动装置都是固定位置设置的,无人船在转向移动的时候,船身将跟随动能装置进行移动,在狭窄的位置区域,船身极易与狭窄位置出现擦碰,严重导致船身损坏。
4、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种无人船自适应动力装置,以期达到更具有实用价值的目的。
技术实现思路
1、为了解决上述技术问题,本发明提供一种无人船自适应动力装置,以解决现有的在无人船在水面使用状态时,无人船的动能驱动装置都是固定位置设置的,无人船在转向移动的时候,船身将跟随动能装置进行移动,在狭窄的位置区域,船身极易与狭窄位置出现擦碰,严重导致船身损坏的问题。
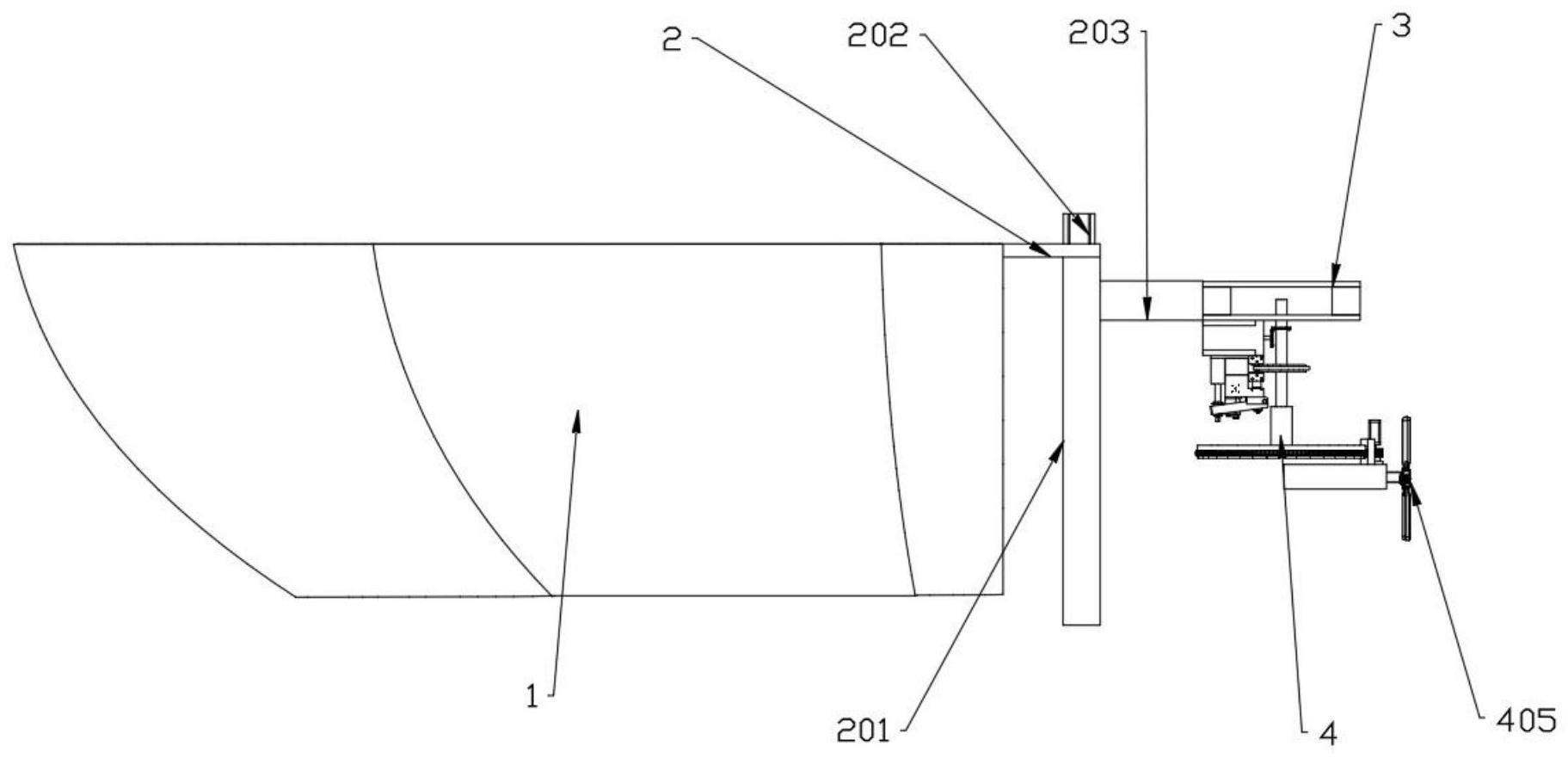
2、本发明提供了一种无人船自适应动力装置,具体包括:无人船体;所述无人船体的前端上方位置与连接架的后端位置固定连接,连接架的前端下方位置与高度精确架的顶部中间位置固定连接,高度精确架的前端位置开设有穿槽,且高度精确架的穿槽内滑动连接有滑动架,滑动架的前端位置与安装架的后端中间位置固定连接,安装架的底部中间位置转动连接有调节杆,调节杆的中间上方位置设置有斜齿轮,调节杆的底部位置与适应调节架的顶部位置固定连接,适应调节架的周面位置设置有齿槽,且适应调节架的周面位置转动连接有环绕调节架,环绕调节架的顶部中间位置固定连接有第二电机,第二电机的底部转轴位置与环绕齿轮的顶部位置固定连接,环绕齿轮的内侧位置与适应调节架的周面齿槽位置相啮合,环绕调节架的底部位置固定连接有第三电机,第三电机转轴位置与动力适应桨的后端位置固定连接。
3、进一步的,所述第三电机位于适应调节架的下端位置,动力适应桨位于适应调节架的外侧位置。
4、进一步的,所述连接架的顶部中间位置固定连接有第一电机,第一电机的底部转轴与传动螺杆的顶部中间位置固定连接,传动螺杆位于高度精确架的内部位置,传动栓座前端中间位置与滑动架的后端中间位置固定连接。
5、进一步的,所述传动栓座滑动连接在高度精确架的内部位置,且传动栓座的顶部位置开设有螺纹孔,传动螺杆转动连接在传动栓座的螺纹孔内,当滑动架位于高度精确架穿槽内部上方位置时,适应调节架位于无人船体的前端中间位置,当滑动架位于高度精确架穿槽内部下方位置时,适应调节架位于无人船体的前端下方位置,在无人船体从水面取出之后,结合当滑动架位于高度精确架穿槽内部上方位置时,适应调节架位于无人船体的前端中间位置,将适应调节架的整体位置进行收纳,避免适应调节架整体的底部位置接触地面位置,导致动力适应桨出现损坏的情况。
6、进一步的,所述安装架的底部后端中间位置固定连接有锁止电机,锁止电机的前端转轴设置有斜齿轮,且锁止电机的前端斜齿轮与调节杆的斜齿轮位置相啮合,锁止电机的底部中间位置固定连接有牵引限制架,牵引限制架位于安装架的下方中后端位置。
7、进一步的,所述锁止电机的底部后端位置与伸缩控制件的顶部位置固定连接,伸缩控制件内部设置有控制器,伸缩控制件的下方位置设置有连动扣,牵引限制架位于伸缩控制件的正前方位置,牵引限制架的底部前端位置与传动架的前端位置转动连接,传动架的顶部后端位置开设有条形槽,连动扣位于传动架的条形槽内。
8、进一步的,所述传动架的中间前端位置设置有转动扣,转动扣的顶部位置与第一夹板件的底部位置转动连接,第一夹板件滑动连接在牵引限制架的前端下方位置,第一夹板件位于传动盘的后端下方位置,第一夹板件的顶部位置设置有弧形凹槽,传动盘下方的圆形卡槽后端位置位于第一夹板件的弧形凹槽内。
9、进一步的,所述锁止电机的底部前端位置固定连接有第二夹板件,第二夹板件位于传动盘的后端上方位置,传动盘的顶部位置与底部位置均设置有圆形卡槽,第二夹板件的底部位置设置有弧形凹槽,传动盘上方的圆形卡槽后端位置位于第二夹板件的弧形凹槽内。
10、与现有技术相比,本发明具有如下有益效果:
11、当无人船体投放到水里且动力适应桨位于水内之后,若是不需要调节无人船体的船身位置进行其他方向的位置移动时,启动第二电机带动环绕齿轮进行转动,通过环绕齿轮与适应调节架周面齿槽位置的啮合传动,环绕调节架将围绕适应调节架的进行环形滑动,进而改变第三电机以及动力适应桨的所处位置,在动力适应桨转动时候产生的推力即可为无人船体提供牵引力,无人船体可以在不改变自身位置的前提情况下向任意方向位置进行移动。
12、若是第二电机损坏亦或者环绕调节架与适应调节架的转动位置首先,使得环绕调节架无法围绕适应调节架进行周转之后,可启动锁止电机,通过锁止电机斜齿轮与调节杆斜齿轮的啮合传动带动调节杆进行转动,进而使得适应调节架整体进行转动,改变动力适应桨目前所处位置,减少本装置的故障使用率。
13、在控制伸缩控制件收缩之后,连动扣将带动传动架的后端位置向上移动,这个时候转动扣同步跟随传动架的位置移动进行向上移动,转动扣将带动第一夹板件向上滑动,从而第一夹板件与第二夹板件对中间位置的传动盘后端位置进行夹持限位,避免调节杆进行转动,通过上述可有效限制调节杆的转幅,避免调节杆出现空转的情况。
技术特征:
1.一种无人船自适应动力装置,其特征在于,包括:无人船体(1);所述无人船体(1)的前端上方位置与连接架(2)的后端位置固定连接,连接架(2)的前端下方位置与高度精确架(201)的顶部中间位置固定连接,高度精确架(201)的前端位置开设有穿槽,且高度精确架(201)的穿槽内滑动连接有滑动架(203),滑动架(203)的前端位置与安装架(3)的后端中间位置固定连接,安装架(3)的底部中间位置转动连接有调节杆(302),调节杆(302)的中间上方位置设置有斜齿轮,调节杆(302)的底部位置与适应调节架(4)的顶部位置固定连接,适应调节架(4)的周面位置设置有齿槽,且适应调节架(4)的周面位置转动连接有环绕调节架(401),环绕调节架(401)的顶部中间位置固定连接有第二电机(402),第二电机(402)的底部转轴位置与环绕齿轮(403)的顶部位置固定连接,环绕齿轮(403)的内侧位置与适应调节架(4)的周面齿槽位置相啮合,环绕调节架(401)的底部位置固定连接有第三电机(404),第三电机(404)转轴位置与动力适应桨(405)的后端位置固定连接。
2.如权利要求1所述一种无人船自适应动力装置,其特征在于:所述第三电机(404)位于适应调节架(4)的下端位置,动力适应桨(405)位于适应调节架(4)的外侧位置。
3.如权利要求1所述一种无人船自适应动力装置,其特征在于:所述连接架(2)的顶部中间位置固定连接有第一电机(202),第一电机(202)的底部转轴与传动螺杆(205)的顶部中间位置固定连接,传动螺杆(205)位于高度精确架(201)的内部位置,传动栓座(204)前端中间位置与滑动架(203)的后端中间位置固定连接。
4.如权利要求3所述一种无人船自适应动力装置,其特征在于:所述传动栓座(204)滑动连接在高度精确架(201)的内部位置,且传动栓座(204)的顶部位置开设有螺纹孔,传动螺杆(205)转动连接在传动栓座(204)的螺纹孔内,当滑动架(203)位于高度精确架(201)穿槽内部上方位置时,适应调节架(4)位于无人船体(1)的前端中间位置,当滑动架(203)位于高度精确架(201)穿槽内部下方位置时,适应调节架(4)位于无人船体(1)的前端下方位置。
5.如权利要求1所述一种无人船自适应动力装置,其特征在于:所述安装架(3)的底部后端中间位置固定连接有锁止电机(301),锁止电机(301)的前端转轴设置有斜齿轮,且锁止电机(301)的前端斜齿轮与调节杆(302)的斜齿轮位置相啮合,锁止电机(301)的底部中间位置固定连接有牵引限制架(304),牵引限制架(304)位于安装架(3)的下方中后端位置。
6.如权利要求5所述一种无人船自适应动力装置,其特征在于:所述锁止电机(301)的底部后端位置与伸缩控制件(305)的顶部位置固定连接,伸缩控制件(305)内部设置有控制器,伸缩控制件(305)的下方位置设置有连动扣(306),牵引限制架(304)位于伸缩控制件(305)的正前方位置,牵引限制架(304)的底部前端位置与传动架(307)的前端位置转动连接,传动架(307)的顶部后端位置开设有条形槽,连动扣(306)位于传动架(307)的条形槽内。
7.如权利要求6所述一种无人船自适应动力装置,其特征在于:所述传动架(307)的中间前端位置设置有转动扣(308),转动扣(308)的顶部位置与第一夹板件(309)的底部位置转动连接,第一夹板件(309)滑动连接在牵引限制架(304)的前端下方位置,第一夹板件(309)位于传动盘(303)的后端下方位置,第一夹板件(309)的顶部位置设置有弧形凹槽,传动盘(303)下方的圆形卡槽后端位置位于第一夹板件(309)的弧形凹槽内。
8.如权利要求5所述一种无人船自适应动力装置,其特征在于:所述锁止电机(301)的底部前端位置固定连接有第二夹板件(310),第二夹板件(310)位于传动盘(303)的后端上方位置,传动盘(303)的顶部位置与底部位置均设置有圆形卡槽,第二夹板件(310)的底部位置设置有弧形凹槽,传动盘(303)上方的圆形卡槽后端位置位于第二夹板件(310)的弧形凹槽内。
技术总结
本发明提供一种无人船自适应动力装置,涉及动力装置技术领域,具体包括:无人船体;所述无人船体的前端上方位置与连接架的后端位置固定连接,连接架的前端下方位置与高度精确架的顶部中间位置固定连接,高度精确架的前端位置开设有穿槽。通过环绕齿轮与适应调节架周面齿槽位置的啮合传动,环绕调节架将围绕适应调节架的进行环形滑动,进而改变第三电机以及动力适应桨的所处位置,在动力适应桨转动时候产生的推力即可为无人船体提供牵引力。解决了无人船在转向移动的时候,船身将跟随动能装置进行移动,在狭窄的位置区域,船身极易与狭窄位置出现擦碰,严重导致船身损坏的问题。
技术研发人员:余海洋,杨洪,陆志天,张傲东,卿斌,路露
受保护的技术使用者:常州大学怀德学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!