一种实船螺旋桨性能预判方法
本发明属于螺旋桨监测领域,尤其是涉及一种实船螺旋桨性能预判方法。
背景技术:
1、随着船舶信息化和数字化的发展,利用船舶采集的螺旋桨数据进行实时预判已经成为可能。低振动、高航速、大吨位船舶已成为船舶制造业的发展趋势,船舶所需要的主机功率也随之迅速提升。螺旋桨作为船舶的推进装置,由于船艉伴流的不均匀性,螺旋桨经过高伴流区域时会产生剧烈空化,空泡的产生、发展和溃灭导致螺旋桨周围区域压力变化剧烈,呈现出具有非常明显的叶频特征,如果与船体结构固有频率发生耦合,则将会致使船舶出现剧烈振动,影响航行安全。
2、现有技术公开了一些对螺旋桨空化状态进行检测或抑制的方法。如公开号为cn110458976a的中国专利文献公开了一种基于小波和主分量分析的螺旋桨空化状态检测方法,提供时频和频率主成分两方面信息,将螺旋桨原始噪声信号特征表达出来,从而识别判断螺旋桨的空化阶段。公开号为cn116933433a的中国专利文献公开了一种基于分布式开孔群的船舶螺旋桨空化噪声抑制方法,在桨叶严重片空化区布置开孔群,并根据桨叶面片空泡体积变化量、推进效率损失量选取最优化的开孔布置方案,以延缓或抑制桨叶处的片空化。
3、船舶在实际营运过程中,会遇到不同的海况条件,当螺旋桨吃水水深发生变化时,螺旋桨空化所诱导的激振力也会随之变化。因此,亟需需要设计一种准确有效的方法来评估螺旋桨所诱导的激振力性能变化情况,提供性能下降预警。
技术实现思路
1、本发明提供了一种实船螺旋桨性能预判方法,可以根据不同载况、不同气象下实船螺旋桨采集数据,准确评估螺旋桨性能变化情况,并提供性能下降预警。
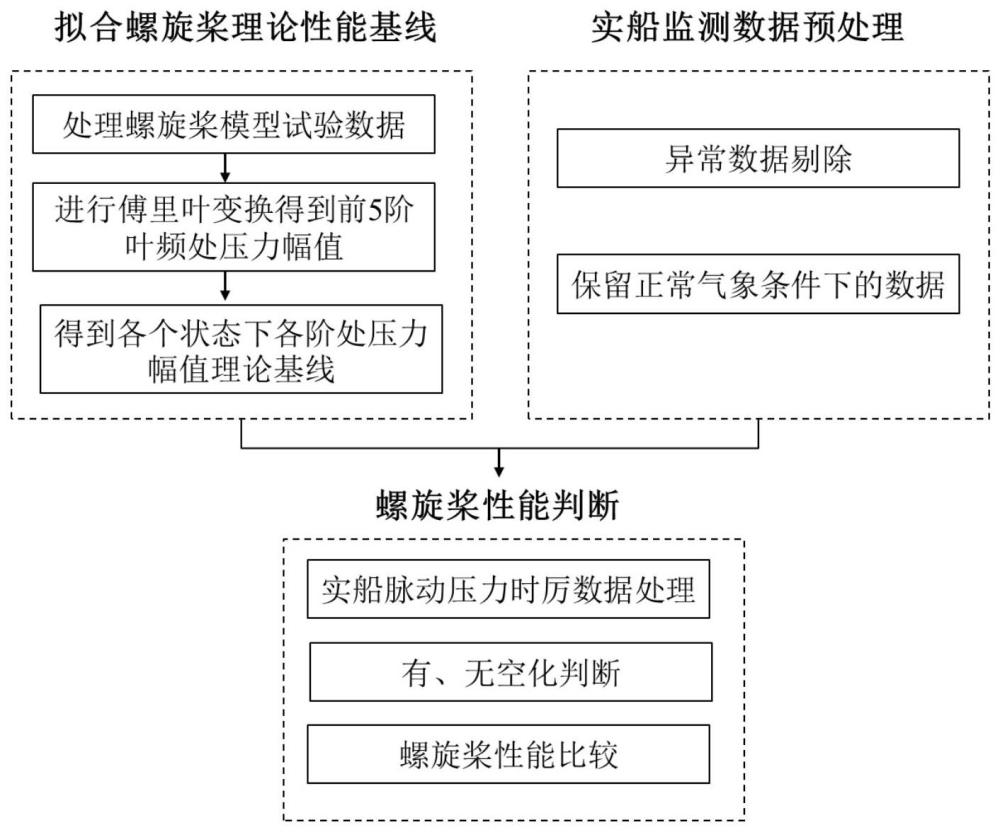
2、一种实船螺旋桨性能预判方法,包括以下步骤:
3、(1)收集螺旋桨模型试验数据,获得试验过程中螺旋桨空化起始时的转速空泡数σ空;
4、(2)采集船舶满载和压载两个工况下,多种梢隙比的螺旋桨模型在试验过程中空化和非空化两个状态的螺旋桨脉动压力的时历曲线数据;
5、(3)对得到的多条时历曲线分别进行傅里叶变换,对变换后的前5阶叶频处脉压数据进行拟合,得到不同工况下各阶处脉动压力幅值的理论基线;
6、(4)获取实船采集的数据并进行预处理,实船采集的数据包括:船舶航速、船舶主机转速、船舶艏吃水、船舶艉吃水、船舶螺旋桨脉动压力、船舶遭遇的风速和风向;
7、(5)对步骤(4)得到的船舶螺旋桨脉动压力时历曲线数据进行傅里叶变换处理,得到前5阶叶频处的实际脉动压力幅值p1、p2、p3、p4、p5;
8、(6)计算10分钟内的螺旋桨主机平均转速、平均船舶艉实际吃水深度h,采用步骤(1)同样的方法计算实船的转速空泡数σ实;接着,判断σ实是否大于σ空,若大于则此状态下为非空化状态,否则即为空化状态;
9、(7)计算实船的梢隙比tcr实,并根据步骤(6)得到当前的空化状态或非空化状态,提取实船在对应状态下满载和压载不同梢隙比的一、二、三、四、五阶脉动压力幅值数据并进行拟合处理;最后计算实际吃水深度下各阶理论脉动压力值x1、x2、x3、x4、x5;
10、(8)比较实际脉动压力幅值p1、p2、p3、p4、p5与理论脉动压力幅值x1、x2、x3、x4、x5,计算各阶之差α1、α2、α3、α4、α5,并根据得到的各阶之差α1、α2、α3、α4、α5进行螺旋桨性能判断。
11、进一步地,步骤(1)中,计算试验过程中螺旋桨空化起始时的转速空泡数σ空,公式为:
12、
13、式中,σ表示转速空泡数;p0为水筒背景压力,由船舶艉吃水深度确定;pe为水的气化压力;ρ为水的密度;n为螺旋桨转速;d为螺旋桨直径。
14、步骤(2)中,梢隙比tcr的计算公式如下:
15、
16、式中,l表示螺旋桨轴心线到船底的距离,d为螺旋桨直径。
17、步骤(3)中,对得到的多条时历曲线分别进行傅里叶变换,得到每条时历曲线一阶、二阶、三阶、四阶、五阶叶频处的脉动压力幅值;根据满载工况空化状态、压载工况空化状态、满载工况非空化、压载工况非空化状态划分数据,得到20个数据组;
18、对20个数据组分别进行拟合,采用y=ax2+bx+c进行拟合,y为脉动压力值,x为梢隙比tcr,a、b、c为系数,拟合得到20个拟合公式,作为不同工况各阶处脉动压力幅值的理论基线。
19、步骤(4)中,进行预处理包括剔除实船采集的异常数据、剔除异常气象和运动条件下的数据;
20、其中,剔除实船采集的异常数据包括:船舶航速>30kn或<0kn;船舶主机转速>100rpm或<0rpm;船舶艏吃水<0m或30m;船舶艉吃水<0m或30m;
21、剔除异常气象和运动条件下的数据具体包括:以10分钟为单位周期,判断10分钟内600组数据有无以下情况:1、船舶遭遇的风速>40kn;2、船舶艏吃水或者船舶艉吃水最大值和最小值相差大于2m;若有以上情况,则将该10分钟数据剔除,不用于后续计算。
22、步骤(7)中,计算实际吃水深度下的各阶理论脉动压力值x1、x2、x3、x4、x5,具体过程为:
23、提取对应状态下满载和压载不同梢隙比的一、二、三、四、五阶脉动压力幅值并进行拟合处理,满载下各阶的公式为ft1(x)、ft2(x)、ft3(x)、ft4(x)、ft5(x);压载下各阶的公式为fb1(x)、fb2(x)、fb3(x)、fb4(x)、fb5(x);
24、将tcr实带入满载和压载下各阶的公式中计算,最终得到x=tcr实满载和压载前5阶的脉动压力预报值,满载下前5阶的脉动压力预报值为p1t、p2t、p3t、p4t、p5t,压载下前5阶的脉动压力预报值为p1b、p2b、p3b、p4b、p5b;
25、计算实际吃水深度h下的各阶的理论脉动压力值:
26、一阶理论脉动压力值:x1=(h-ba)*(p1b-p1t)/(ta-ba)+p1t
27、二阶理论脉动压力值:x2=(h-ba)*(p2b-p2t)/(ta-ba)+p2t
28、三阶理论脉动压力值:x3=(h-ba)*(p3b-p3t)/(ta-ba)+p3t
29、四阶理论脉动压力值:x4=(h-ba)*(p4b-p4t)/(ta-ba)+p4t
30、五阶理论脉动压力值:x5=(h-ba)*(p5b-p5t)/(ta-ba)+p5t
31、式中,ba表示压载状态船舶艉吃水,ta表示满载状态船舶艉吃水。步骤(8)中,计算各阶之差α1、α2、α3、α4、α5,公式为:
32、α1=|p1-x1|/x1
33、α2=|p2-x2|/x2
34、α3=|p3-x3|/x3
35、α4=|p4-x4|/x4
36、α5=|p5-x5|/x5。
37、步骤(8)中,根据得到的各阶之差α1、α2、α3、α4、α5进行螺旋桨性能判断,具体为:
38、若α1≥10%,则输出结论为螺旋桨性能变差;若α1<10%,且α2>10%,则输出结论为螺旋桨性能有下降趋势;若α1、α2、α3、α4、α5<10%,则输出结论为螺旋桨性能较好;其余情况则输出结论为螺旋桨性能在正常区间。
39、与现有技术相比,本发明具有以下有益效果:
40、1、步骤(1)中提供的螺旋桨空化起始转速空泡数可判断实船在不同的营运状态是否有无空泡,以便更快的对螺旋桨运行状态进行识别;
41、2、基于模型试验得到的不同工况下各阶处脉压幅值的理论基线,该基线作为螺旋桨脉压性能的边界值,可快速插值出实船不同运营工况的理论预报值。
42、3、本发明提出了一种螺旋桨性能健康状态判别方法,可对实船监测得到的螺旋桨脉压幅值与理论预报值对比分析,可快速判别螺旋桨性能是否有异常,从而提升船舶螺旋桨性能的监测能力,避免因为螺旋桨性能下降导致船舶航行出现故障,从而提升螺旋桨性能下降的预估能力。
- 还没有人留言评论。精彩留言会获得点赞!