一种风帆助推船舶直升机作业控制方法与流程
本发明属于船舶建造及设计领域,具体涉及一种风帆助推船舶直升机作业控制方法。
背景技术:
1、现代风帆助推装置正成为远洋船舶绿色化发展中的热门装置之一。受风帆装置的气动力影响,加装风帆助推装置的船舶在甲板面处会产生不同于原有船舶的气流场,特别是对去流方向的空气形成扰动,该扰动形成的流场,会对直升机的起降和/或悬停操作造成负面影响,直接威胁到作业安全,该影响应充分评估和考虑。
2、针对风帆助推装置对船舶甲板气流场产生的影响以及风帆助推船舶的直升机作业控制方法,目前并未有成熟可靠的经验可借鉴。为保证直升机作业安全,有必要提供一种可靠的评估方法,为风帆助推船舶的直升机操作提供指导。
技术实现思路
1、为解决上述问题,本发明提供一种风帆助推船舶直升机作业控制方法,旨在达到风帆助推船舶在不同装载状态下,直升机安全起降的目的,其所采用的技术方案是:
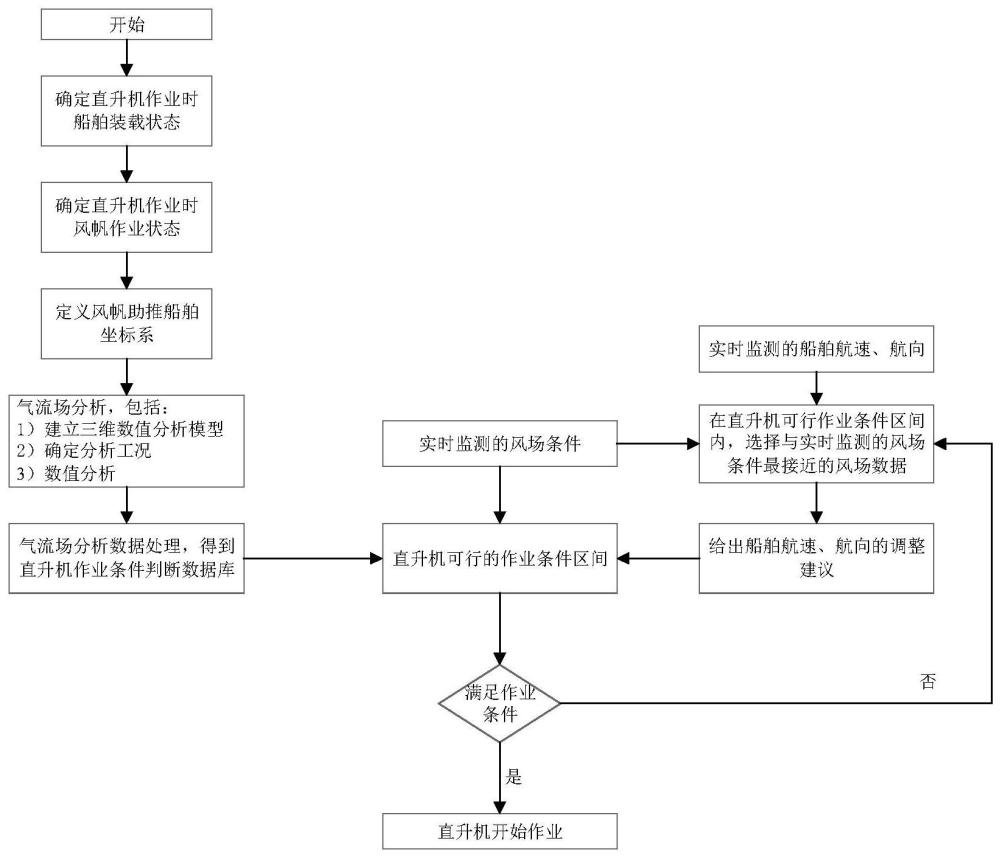
2、一种风帆助推船舶直升机作业控制方法,具体操作步骤为:
3、s1:确定直升机作业时的船舶装载状态及风帆作业状态
4、风帆助推船舶在直升机起降过程中,为保证作业安全,风帆装置应处于静止或回收状态。
5、船舶装载状态可为满载或压载或特定装载状态,特定装载状态记为lm,共m个装载状态。
6、风帆助推船舶配备功能正常且经过校准的风速风向仪,用于监测船舶实时的相对风速、相对风向角。
7、风帆助推船舶配备功能正常且经校准的差分全球定位系统(dgps),用于提供船舶的实时航速、航向。
8、s2:定义风帆助推船舶坐标系
9、在确定直升机作业时的船舶装载状态及风帆作业状态后,定义风帆助推船舶气流场分析坐标系,风帆助推船舶气流场分析坐标系定义为右手直角坐标系,记为coor.0,
10、其中,坐标原点0:取尾垂线、中纵剖面与基线的相交处。
11、x轴:纵向轴,正方向为从船尾指向船首。
12、y轴:横向轴,正方向为从船中心线指向左舷。
13、z轴:垂向轴,正方向为垂直xy面向上。
14、风帆助推船舶的航向与坐标系coor.0的x轴方向一致。
15、风帆助推船舶相对风向角α,定义为风的来向与船首向之间的夹角,顺时针旋转为正,α∈[0°,360°]。当船艏正迎风时,α=0°。
16、s3:风帆助推船舶气流场分析
17、针对不同的船舶装载状态,计算各个相对风速aws、相对风向角awa下直升机甲板上方的气流场情况。
18、具体步骤包括:
19、s3.1:建立风帆船舶三维数值分析模型。
20、控制方程:采用不可压缩流体连续性方程和rans方程。
21、湍流模型:采用rngk-ε进行风帆助推船舶气动力模拟,以获得更高的计算精度。
22、离散格式及求解方法:微分方程使用有限体积法进行离散,压力和速度耦合采用simple(semi-implicit method for pressure linked equations)方法,离散得到的代数方程使用gauss-seidel迭代求解。
23、s3.2:确定计算工况(lm,awap,awsq)
24、相对风向角awa的计算范围为[0°~360°),间隔为15°,共计24个风向角。awap表示第p个相对风向角(p=1,2,…,24),对应的相对风向角为15°*(p-1)。
25、相对风速aws的计算范围为[5m/s~50m/s],风速间隔为0.5m/s,共计91个风速。awsq表示第q个相对风速(q=1,2,…,91),对应的相对风速为5m/s+0.5*(q-1)m/s。
26、风场数值模拟应涵盖所有的直升机作业时船舶的装载状态,lm表示第m个装载状态(m=1,…,m);
27、s4:气流场计算结果数据处理
28、s4.1:计算所有工况下,直升机作业区域的垂向速度标准差,得到垂向速度标准差数据库
29、针对特定工况下(装载状态lm,相对风速awsq,相对风向角awap)的甲板气流场分析,待计算结果稳定后,提取直升机甲板面上方6m处一定时间段内的垂向速度,根据下式计算垂直方向的平均速度uz(lm,awap,awsq):
30、
31、其中,n为特定计算工况下提取的垂向速度的样本个数。
32、ti为第i个采样时刻,i不小于60。
33、基于计算得到的平均速度,进一步计算垂向速度标准差s(uz(lm,awap,awsq)):
34、
35、如此重复上述过程,可得到所有计算工况下,直升机作业条件判断数据库,即垂向速度标准差数据库。
36、s4.2:对垂向速度标准差数据库进行清洗,得到直升机可行的作业区间
37、以步骤s4.1中建立的数据库为基础,进一步进行数据筛选处理,得到在不同船舶装载状态下,直升机可行的作业区间,即相对风速和相对风向角范围。如下表所示:
38、
39、表中,awsm,p表示装载状态lm下,相对风向角awap下,可允许的直升机作业最大相对风速。
40、s5:根据气流场情况,给出船舶调整建议,以提供更优的直升机作业条件。或针对不满足直升机作业条件的工况,提供船舶操作建议,以满足直升机作业要求,具体步骤如下:
41、s5.1:判断直升机是否满足作业条件
42、确定船舶装载状态,根据船舶实时监测的相对风向角awareal、相对风速awsreal,对照风帆助推船舶直升机可行作业区间,确认是否可满足作业条件。
43、如无法满足直升机作业条件或者满足直升机作业条件,但需要对作业条件进行优化,执行如下步骤:
44、s5.2,在“直升机可行作业区间”表格中筛选与awareal、awsreal、最接近的数据单元,得到直升机作业可行的相对风向角awap及允许的最大相对风速awsm,p。
45、s5.3:计算实时绝对风向和绝对风向角
46、根据差分全球定位系统(dgps),获取船舶的实时航速vreal、航向areal,
47、根据实时监测的相对风向角awareal、相对风速awsreal及船舶航速vreal、航向areal,经矢量计算,得到实时的绝对风向角twareal,绝对风速twsreal。
48、s5.4:计算所需调整的航速和航向
49、在步骤s5.2基础上,再进行矢量计算,由绝对风向角twareal、绝对风速twsreal、直升机作业允许的相对风向角awap及最大相对风速awsm,p,得到船舶需提供的新航速vreal-m、新航向areal-m。
50、船舶按照上述原则调整航行状态后,即可满足直升机作业条件。
51、上述一种风帆助推船舶直升机作业控制方法,更近一步地,步骤s3.2中,相对风向角间隔、相对风速间隔可根据计算精度需求自行调整。
52、上述一种风帆助推船舶直升机作业控制方法,更近一步地,步骤s4.2中,数据库筛选标准为:直升机作业过程中,以垂向速度标准差不大于1.75m/s以及最大作业环境风速50m/s为限制条件,得到满足直升机作业条件的作业区间。
53、上述一种风帆助推船舶直升机作业控制方法,更近一步地,步骤s1中的风速风向仪安装在船舶尾部桅杆上。
54、上述一种风帆助推船舶直升机作业控制方法,更近一步地,步骤s1中的差分全球定位系统dgps设备位于驾驶室内。
55、上述一种风帆助推船舶直升机作业控制方法,更近一步地,风帆助推船舶共加装4套具有升降功能的翼型风帆助推装置。
56、上述一种风帆助推船舶直升机作业控制方法,更近一步地,步骤s4.1中,一定时间段为1.5min~2min。
57、本发明的有益效果是:
58、1.本发明提供的针对直升机作业控制方法的技术方案,可充分考虑风帆助推船舶的各个装载状态,考虑所有可能出现的船舶状态与风场情况的工况组合,通过对所有可能出现的工况进行其流场分析,明确不同工况下,直升机作业区域的气流场情况,包括垂向速度、垂向速度标准差。
59、2.本发明通过建立直升机可行性作业区间,可为直升机拟进行的起降作业提供指导,明确友好的起降操作环境,有助于飞行员根据船舶装载状态,自助选择更加有利于起降作业的风场环境,从而优化起降作业。(实施例1.1)
60、3.本发明可根据船舶装载状态及风场环境,提供船舶航行状态调整方法,可提前根据起降计划调整船舶状态,创造更加安全的操作区间,提高操作安全性(实施例1.2)。
61、4.针对需要即刻进行直升机作业,但环境条件不满足的情况,本发明提供了一种船舶状态调整控制方法,根据此方法调整船舶状态后,可满足直升机作业条件,保证操作安全(实施例1.3)。
62、5.本发明提供的计算方法,适用于各类型的风帆助推船舶,风帆类型包括翼型风帆、转子帆等形式,船型包括油船、散货船、箱船、气体船等类型,为船舶直升机作业控制方法提供思路。
- 还没有人留言评论。精彩留言会获得点赞!