一种无人船回收装置的工作方法与流程
本发明涉及无人船,具体涉及一种无人船回收装置的工作方法。
背景技术:
1、在无人船以水面舰艇为母船执行任务时,需要对无人船进行布放和回收,以确保无人船在完成任务后能够安全回收至母船上,目前针对无人船在海上的布放和回收技术,大部分是通过母船靠近无人船,然后通过设置的自动拖挂钩装置钩住无人船,再经过母船上的吊臂缆绳将无人船吊回母船上,除此之外,还有其他的技术方案,如中国专利申请号为201811319493.x,公告日为2019.05.10的专利文献,其公开了一种无人船回收设备,在母船船体上设置斜板,在斜板上设置滑轨和齿条,在滑轨上滑动地设有对接装置,在斜板与对接装置之间设有驱动装置;对接装置包括滑动架和导向锁止装置,导向锁止装置包括u形本体,u形本体包括连接部和直身部,连接部的两端分别设有向后延伸的直身部,在直身部上设有向后延伸且向外倾斜的导向杆;在滑轨的顶端和底端均设有第二锁止机构,在船体上位于斜板的底端铰接有滑板机构,无人船在回收时,先通过滑板机构,然后扣接在导向锁止机构上,由驱动机构拉回船体内。
2、但是该文献中的扇形支架是一体成型,然后安装在滑板机构,由于扇形支架的重量大、体积大,使得安装过程的难度大,这样容易影响扇形支架的安装,从而影响无人船的布放与回收,并且在牵引小车拉动无人船移动过程中,仅仅是通过牵引小车在导轨里滑动实现移动,但是由于将无人船拉入到导向架之后,由于无人船具有体积大的特点,且在导向架内容易出现左右晃动的情况,而若牵引小车在母船的船体上不能稳定的移动将会导致无人船不能可靠地被回收到母船船体上。
技术实现思路
1、本发明的目的在于提供一种无人船回收装置的工作方法,能够使得设置在驱动装置和门板之间的三角支撑装置安装难度低且安装方便,进而便于实现门板的收放,从而便于无人船在母船船体上可靠地布放与回收。
2、为达到上述目的,一种无人船回收装置的工作方法,通过在驱动装置和门板之间设置三角支撑装置,实现门板的收放,进而通过牵引小车对无人船实现捕捉并牵引回收至母船上;
3、包括以下步骤:
4、s1.将连接块的一端焊接在门板上,连接块的另一端与母船船体上斜板的两侧进行铰接;
5、s2.将第一连杆连接在花键轴上并调整第一连杆在花键轴上的位置,使得第一连杆与扇形齿轮的一侧边平行设置且第一连杆与斜板之间的夹角等于扇形齿轮两侧边之间的夹角,然后将斜杆的两端分别与第一连杆和门板固定焊接,使得第一连杆、斜杆以及门板之间呈三角设置,接着将第二连杆的两端焊接在斜杆与门板之间;
6、s3.驱动电机带动扇形齿轮转动,进而带动第一连杆转动,使得第一连杆带动斜杆转动,同时带动门板绕着铰接处转动,使门板转动下放,并使得门板倾斜设置;
7、s4.第一驱动电机带动齿轮在齿条上转动,使得牵引小车沿着在斜板上的导轨滑动至预设位置,门板向上转动并带动无人船进入到导向架内,通过导向架对无人船实现捕捉,并通过缓冲装置对无人船进行缓冲;
8、s5.驱动牵引小车的行走轮在轨道内滚动同时牵引小车的水平轮与导轨的外侧垂直滚动,使得牵引小车牵引无人船回收至母船船体上,然后驱动第一连杆转动并使得第一连杆转动的角度等于扇形齿轮两侧边之间的夹角角度,最后使得第一连杆贴合在斜板上并通过插销进行固定,实现门板转动回收。
9、以上设置,通过将第一连杆与扇形齿轮的一侧边平行设置在花键轴上,能够在驱动门板下放后,使得第一连杆与斜板之间的夹角等于扇形齿轮两侧边之间的夹角,在驱动门板回收后,使得第一连杆转动的角度等于扇形齿轮两侧边之间的夹角角度;同时斜板的两侧设置连接块,便于对门板与斜板进行初步固定,便于后续将斜杆固定在门板上;通过将第一连杆、斜杆以及门板之间焊接形成三角,这样驱动门板转动过程中,可以根据力矩平衡原理,对于相同重量的门板,由于斜杆的长度长从而采用较小力作用在斜杆与第一连接杆之间即可拉动门板转动,保证了门板转动过程中所需的强度,从而实现稳定展开和收回;另外设置第一驱动电机驱动牵引小车,能够使得牵引小车通过导向架对无人船实现捕捉,并通过缓冲装置对无人船进行缓冲;且在无人船捕捉过程之前先将门板放置为倾斜设置,然后将门板向上转动从而带动无人船在惯性作用下进入到导向架内进行捕捉,并在捕捉完成之后通过牵引小车的行走轮在导轨里行走然后水平轮与导轨侧面相接触,从而实现牵引小车能稳定地在导轨里滑动,进而使得牵引小车能更加稳定地将无人船拉到母船的船体上,最后驱动第一连杆转动并使得第一连杆转动的角度等于扇形齿轮两侧边之间的夹角角度,这样能够使得第一连杆在转动后贴合在斜板上并通过插销实现固定,从而实现门板转动回收,最后完成无人船的收放。
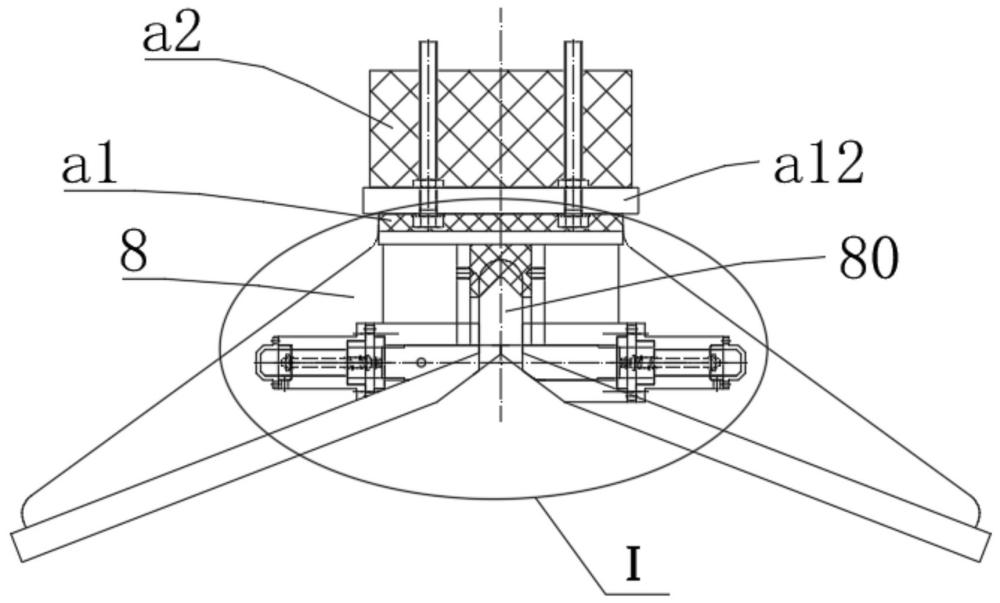
10、进一步的,所述驱动装置通过所述三角支撑装置与门板连接,所述门板通过连接块与母船船体铰接,驱动装置包括驱动电机、减速箱、输出齿轮、扇形齿轮以及花键轴,三角支撑装置包括第一连杆、第二连杆以及斜杆,驱动电机设置在减速箱的一侧,减速箱通过支承座设置在母船船体上,设置在减速箱上的输出齿轮与扇形齿轮外啮合转动连接,所述花键轴的一端穿过固定座与扇形齿轮的端部连接,所述花键轴的另一端与第一连杆连接,第一连杆与门板之间通过斜杆连接,第一连杆、斜杆以及门板呈三角设置,第一连杆与门板之间的角度值大于90度;
11、第一连杆的一端与花键轴连接,第一连杆的另一端与斜杆的一端固定连接,连接处设有第五通孔,斜杆的另一端固定在门板上,第二连杆设置在门板与斜杆之间,第二连杆的两端分别与门板和斜杆的中部固定连接,第二连杆的中部设有第六通孔。
12、以上设置,将减速箱通过支承座设置在母船船体上,同时在减速箱上设置输出齿轮,能够使得减速箱带动输出齿轮与扇形齿轮实现外啮合;另外通过在母船船体上设置固定座,并使得花键轴穿过固定座分别与扇形齿轮和第一连杆连接,能够通过扇形齿轮转动,进而带动花键轴和第一连杆同时转动;将第一连杆、斜杆以及门板呈三角设置,同时使得第一连杆与门板之间的夹角大于90度,这样在扇形齿轮带动第一连杆转动的过程中,门板展开的角度更大,且在船体与门板通过连接块铰接,从而使得门板能伸出的距离更长,由于第一连杆与门板之间通过斜杆连接,斜杆的长度长,使得门板转动过程中是通过第一连杆带动斜杆同时转动将门板收回时,根据力矩平衡原理,对于相同重量的门板,由于斜杆的长度长从而采用较小力作用在斜杆与第一连接杆之间即可拉动门板转动,保证了门板转动过程中所需的强度,从而实现稳定转动;将第一连杆通过斜杆与门板连接,并在第一连杆带动斜杆转动到母船船体上后,可以通过第五通孔将门板固定在母船船体上;在第一连杆带动门板转动到母船船体后,可以通过第六通孔进一步将门板稳定固定在母船船体上。
13、进一步的,在母船船体上位于扇形齿轮的正下方设有齿槽,扇形齿轮中心角的角度小于90度。
14、以上设置,这样在扇形齿轮带动第一连杆转动的过程中能够容纳在齿槽;同时使得扇形齿轮不会占用较大空间,同时也不需要在门板上开设相应的通孔用于容纳扇形齿轮,增大门板的强度。
15、进一步的,所述牵引小车包括车体、牵引装置以及缓冲装置,在车体的前端设有一个以上且沿着竖直方向线性设置的安装座,所述缓冲装置安装在安装座上,所述牵引装置设置在车体的底部且与母船船体上的导轨上滑动;
16、所述缓冲装置包括第一缓冲垫、法兰板以及第二缓冲垫,所述法兰板包括第一法兰板和第二法兰板,所述第一法兰板的两端设有第三通孔,第一法兰板固定在导向架上,所述第二法兰板的两端设有第三通孔和第四通孔,第一螺栓依次穿过第三通孔将第一缓冲垫和第二法兰板连接形成一体并固定在导向架上,导向架上设有用于容纳无人船前端的容纳腔,第一缓冲垫的下端穿过第二法兰板之后设置在导向架的容纳腔内,第一法兰板和第二法兰板同轴且平行设置,第二螺栓穿过第四通孔将第二缓冲垫和第二法兰板连接形成一体并固定在导向架上,导向架、第一缓冲垫、第一法兰板、第二法兰板以及第二缓冲垫形成一整体并通过第二螺栓安装在安装座上;
17、所述牵引装置包括水平轮、行走轮、支座、两固定轴和车架法兰板,所述支座通过车架法兰板固定在车体的底部,所述支座包括第一支座和第二支座,所述第一支座设置在车架法兰板的下方且通过螺栓与车架法兰板固定连接,所述第二支座位于第一支座的下方且垂直设置在第一支座的一侧,所述水平轮与导轨的外侧垂直滚动且通过轴承固定在一固定轴的一端,所述一固定轴的另一端穿过第一支座和车架法兰板并通过限位装置固定卡接,所述行走轮设置在母船的导轨内且通过轴承固定在另一固定轴的一端,所述另一固定轴的另一端穿过第二支座并通过限位装置固定卡接,水平轮的轴线与行走轮轴线垂直设置;
18、所述限位装置包括螺丝和限位垫片,所述限位垫片通过螺丝分别固定在车架法兰板和第二支座上,限位垫片的一侧嵌入固定轴的缺口内与固定轴卡接。
19、以上设置,通过在车体的前端设置一个以上且沿着竖直方向线性排布的安装座,能够使得缓冲装置依据无人船前端的高度安装在不同高度的安装座上,从而使得缓冲装置能够准确对无人船实现缓冲;在缓冲装置中通过在第一法兰板上设置第三通孔,同时在第二法兰板上设置第三通孔和第四通孔,便于第一螺栓穿过第四通孔,然后将第一缓冲垫和第二法兰板固定连接形成一体,进而将形成一体的第一缓冲垫和第二法兰板固定在第一法兰板上,这样在回收无人船过程中,第一缓冲垫对无人船起到首次缓冲作用,降低无人船回收过程的速度;另外设置第二螺栓穿过第四通孔将第二缓冲垫和第二法兰板固定连接形成一体并固定在车体上,这样便能够将第一缓冲垫、第二法兰板以及第二缓冲垫固定连接形成一整体并固定在车体上,这样在无人船首次冲击第一缓冲垫后,由于第一缓冲垫的下端凸出设置在容纳腔内,使得第二缓冲垫继续对第一缓冲垫和无人船起到二次缓冲作用,同时将第一法兰板和第二法兰板同轴且平行设置,这样能够使得两次缓冲作用在同一直线上,从而使得对无人船的缓冲效果更好;在牵引装置中,通过设置第一支座通过螺栓与车架法兰板固定连接,同时设置第二支座与第一支座垂直设置,能够将第一支座、第二支座与车架法兰板连接形成一体,进而实现通过固定轴将水平轮、行走轮固定在车体的底部;通过设置水平轮与导轨的外侧垂直滚动,这样使得行走轮在导轨内滚动的过程中,水平轮一方面能从导轨的侧面对牵引装置进行导向,同时也能防止牵引无人船回收过程中由于左右摆动而导致行走轮出现侧翻,从而确保牵引小车水平方向的稳定性,同时行走轮竖直设置在导轨内,这样在滚动过程中能够保证牵引小车竖直方向的稳定性,从而使得牵引小车在母船船体上牵引无人船移动的过程中稳定性更好。
20、进一步的,所述第一支座和车架法兰板上均设有与一固定轴相匹配的第一通孔,在第一通孔的一侧设有与螺丝相匹配的第一连接孔,第二支座上设有与另一固定轴相匹配的第二通孔,在第二通孔的一侧设有与螺丝相匹配的第二连接孔。
21、以上设置,这样能够通过一固定轴穿过第一支座和车架法兰板,然后通过螺丝将限位垫片固定在车架法兰板上,从而对一固定轴实现卡接;同时能够通过另一固定轴穿过第二支座,然后通过螺丝将限位垫片固定在第二支座上,从而对第二支座实现卡接。
22、进一步的,在车体的底部设有第一驱动电机、减速箱和齿轮,第一驱动电机与减速箱的输入端连接,减速箱的输出端与齿轮连接,齿轮与设置在母船船体上的齿条相匹配连接,导轨对称设置在齿条的两侧;所述水平轮与第一支座之间以及行走轮与第二支座之间均设有垫圈。
23、以上设置,这样便于通过第一驱动电机带动减速箱转动,然后通过减速箱带动齿轮在齿条上转动,从而带动行走轮在导轨内滚动,同时使得水平轮垂直地沿着导轨的外侧滚动;另外能够通过垫圈填充水平轮与第一支座之间以及行走轮与第二支座之间的间距,从而限制水平轮沿着一固定轴的上下方向移动,限制行走轮沿着另一固定轴的水平方向移动。
24、进一步的,所述牵引装置还包括筋板,所述筋板与车架法兰板垂直设置且筋板一体成型固定在车体的底部,在水平轮与第一支座之间以及行走轮与第二支座之间均设有垫圈。
25、以上设置,能够通过垫圈填充水平轮与第一支座之间以及行走轮与第二支座之间的间距,从而限制水平轮沿着一固定轴的上下方向移动,限制行走轮沿着另一固定轴的水平方向移动;通过设置筋板与车架法兰板垂直且一体成型,便于通过筋板固定在车体的底部。
26、进一步的,所述第三通孔和第四通孔错位设置在第二法兰板上,第一法兰板的中部设有与凸出部所匹配的通孔。
27、以上设置,避免第三通孔和第四通孔设置在同一位置,无法将第二缓冲垫通过第二法兰板固定在第一缓冲垫;便于第一缓冲垫的凸出部穿过通孔固定在第一法兰板上。
28、进一步的,所述第一缓冲垫的截面为“t”型,所述第一缓冲垫包括凸出部和连接部,凸出部设置在导向架的容纳腔内且通过螺丝固定在容纳腔的两侧壁上,凸出部的一侧与无人船相抵触的位置设有开口。
29、以上设置,便于通过螺丝将第一缓冲垫的凸出部固定在导向架的容纳腔内;通过开口与无人船的前端相匹配,增大无人船的前端与第一缓冲垫的接触面积,起到更好的缓冲效果。
30、进一步的,所述第一螺栓和第二螺栓均设置有两个以上。
31、以上设置,便于通过第一螺栓和第二螺栓将第一缓冲垫、第二法兰板以及第二缓冲垫固定连接形成一整体并固定在导向架上上。
- 还没有人留言评论。精彩留言会获得点赞!