一种用于水下机器人的回收布放装置
本发明涉及水下机器人回收布放领域,具体是一种用于水下机器人的回收布放装置。
背景技术:
1、随着当今世界能源开发及竞争日益激烈,海洋能源的开采和远洋运输的重要性迅速凸显。随之,实现这些开采及运输的海洋设备变得越来越重要,海上恶劣的工况会使回收水下作业机器人过程中产生剧烈的摆荡,造成水下机器人对其他钢结构的碰撞,发生意外,同时也严重影响正常的收放作业。
2、现有水下机器人回收布放装置通常为利用机械装置被动对止荡器进行横摇纵摇止荡,其止荡效果不明显,其具有滞后性,较为先进的也仅有纵摇止荡的液压装置,由于船体横摇问题不可忽视,有必要增加横摇止荡装置。
技术实现思路
1、本发明要解决的问题是由于船体横摇纵摇造成的无法对水下机器人安全对接和回收的问题,本发明提供了一种水下机器人回收布放止荡器、a型摆架,其能够在对接时保障对接工作的顺利完成同时防止回收过程中对其他结构的干涉。
2、为实现上述目的,本发明提供了一种用于水下机器人的回收布放装置,包括a型架和止荡器;a型架和止荡器铰接,a型架用于安装止荡器并利用a架摆动油缸实现从舷内到舷外的变幅,止荡器用于固定水下机器人和减小水下机器人的摇晃。
3、进一步地,a型架包括a架底座、平衡油缸、a架主梁、a架摆动油缸、上平台和纵摇油缸;平衡油缸一端铰接a架底座,另一端铰接上平台,平衡油缸用于调整上平台的姿态,通过控制平衡油缸出杆长度调节上平台使其与甲板平行;a架摆动油缸一端铰接于a架底座,另一端铰接于a架主梁上,通过控制摆动油缸出杆长度控制a架主梁舷内外角度;上平台铰接止荡器,其上有吊耳用于铰接纵摇油缸,通过控制纵摇油缸出杆长度控制止荡器的纵向摆幅。
4、止荡器包括摆动架、下支撑和导接头旋转件;摆动架铰接于a架上平台并靠纵摇油缸减缓纵向摆幅,摆动架中的垂向方管和下支撑中的左右垂向方管滑动连接;导接头旋转件与下支撑的下回转支承外圈固定连接,用于与水下机器人对接。
5、进一步地,摆动架包括上梁、横摇油缸、垂向方管、上回转支承、横杆、滑轮、连接架、中间支撑架;上梁与纵摇油缸铰接,上梁两端分别铰接两个横摇油缸的一端;上梁的横梁中间位置铰接横杆;通过调整横摇油缸的液压杆出杆长度,进而控制止荡器的横摇;横杆的两端固定连接垂向方管一端,垂向方管靠近另一端与中间支撑架固定连接且安装有吊耳与横摇油缸的另一端铰接,且垂向方管与下支撑中左右垂向方管滑动连接;上回转支承连接中间支撑架与连接架;连接架与横杆转动连接;滑轮与连接架转动连接,滑轮绳槽内缠绕缆绳。
6、进一步地,上回转支承分为上回转支承内圈和上回转支承外圈;上回转支承内圈和上回转支承外圈能相互转动,上回转支承外圈固定安装在中间支撑架上,上回转支承内圈与连接架固定连接;当出绳方向改变,上回转支承内圈转动,带动连接架转动,实现缆绳的换向。
7、进一步地,下支撑包含支撑板、左右垂向方管、下回转支承、齿轮和液压马达;支撑板与左右垂向方管固定连接,下回转支承包含下回转支承外圈和下回转支承内圈,下回转支承外圈和下回转支承内圈能相对转动;下回转支承内圈与支撑板固定连接,下回转支承外圈为齿轮结构且与齿轮配合安装,齿轮与液压马达的输出轴固定连接;液压马达固定安装在支撑板上;当液压马达的主轴转动时,带动齿轮转动,进而带动下回转支承的外圈齿轮转动,从而实现导接头旋转件的转动来调节水下机器人的朝向。
8、进一步地,垂向方管和下支撑中的左右垂向方管内部设置有伸缩油缸,伸缩液压缸一端铰接于所述摆动架垂向方管内,另一端固定在下支撑中的左右垂向方管中;伸缩油缸用于控制下支撑的纵向升降。
9、进一步地,导接头旋转件包含导接头筒体、底板、可移动缓冲盘、橡胶球、尼龙导缆筒和橡胶垫;导接头筒体和所述底板焊接在一起,所述尼龙导缆筒固定安装在导接头筒体内;底板开有多个孔,多个连接轴穿过底板上的孔与可移动缓冲盘上焊接固定,进而移动缓冲盘与底板沿连接轴产生相对移动;橡胶球设置在移动缓冲盘与底板之间,且与底板固定安装,当可移动缓冲盘向上抬起时,橡胶球缓冲水下机器人对接时的冲击力,可移动缓冲盘与水下机器人接触部位安装有橡胶垫,橡胶垫用以缓冲水下机器人对接时的冲击同时避免对钢结构的磨损、冲击。
10、进一步地,导接头旋转件还包括卡钳、卡钳液压缸;导接头筒体上的凸台位置设置有空槽,铰接安装卡钳,卡钳液压缸铰接安装在卡钳上,通过调整卡钳液压缸出杆长度,带动卡钳实现解锁和锁死的功能。
11、进一步地,上梁为四根方管焊接成的矩形框,矩形框中间有间隔,使摆动架中的横杆与垂向方管在止荡器随动时不与其他部位干涉。
12、与现有技术相比,本发明的有益效果是:
13、(1)本发明采用a架上平台,通过将纵摇油缸铰接在上平台上能实现大力臂的纵摇止荡,防止由于增大力臂造成的钢结构悬空,增强了结构稳定性;
14、(2)摆动架连接板安装在回转支承上具有方向可调的功能,满足了甲板不同的布置下都能完成回收布放作业的要求;
15、(3)摆动架的上梁为四根方管焊接成的矩形框,矩形框中间有间隔,止荡器随动时,可以使止荡器摆动架中的横杆与垂向方管在小幅度横摇的同时不与其他部位干涉;
16、(4)水下机器人被缆绳牵引出水面,缆绳穿过止荡器,滑轮和尼龙导缆筒对缆绳的挤压力在一定程度上具有初步止荡功能;
17、(5)在摆动架上安装有横摇油缸,将液压杆位移传感器检测到的出杆位移输入控制系统将实时位移与理论位移进行做差,经反馈进而转化成输出的位移和油缸压力,摆动架左右对称的横摇油缸同时分摊止荡力,使其更高效的完成横摇止荡。a型架从舷外摆动到舷内指定角度时,由内置伸缩油缸进行水下机器人的放置。伸缩方管减小了a型架舷内角度,利于作业,同时节省了空间。
技术特征:
1.一种用于水下机器人的回收布放装置,其特征在于,包括a型架和止荡器;a型架和止荡器铰接,a型架用于安装止荡器并利用a架摆动油缸(4)实现从舷内到舷外的变幅,止荡器用于固定和调节水下机器人的位置以及减小水下机器人的摇晃。
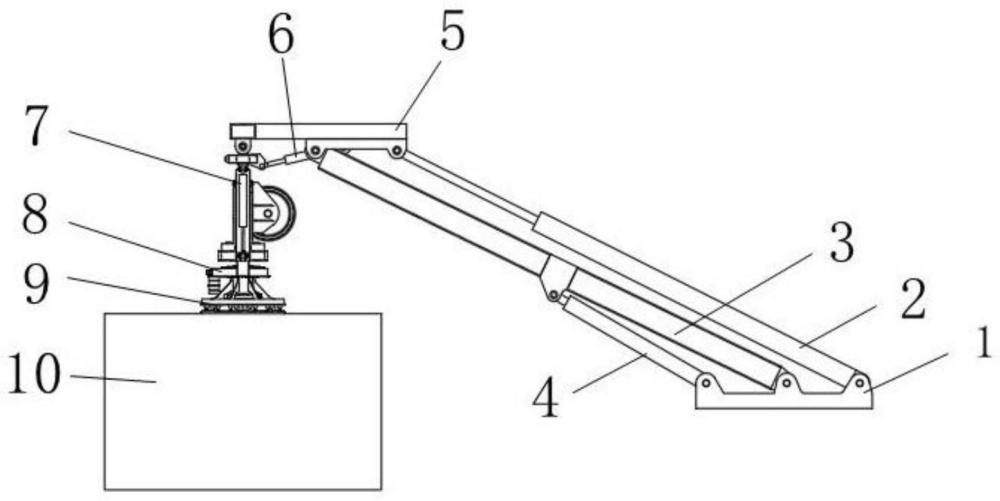
2.根据权利要求1所述的用于水下机器人的回收布放装置,其特征在于,a型架包括a架底座(1)、平衡油缸(2)、a架主梁(3)、a架摆动油缸(4)、上平台(5)和纵摇油缸(6);a架底座(1)固定于甲板上,a架主梁(3)一端铰接于a架底座(1)上,a架主梁(3)另一端与上平台(5)铰接;平衡油缸(2)一端铰接a架底座(1),另一端铰接上平台(5),平衡油缸(2)用于调整上平台(5)的姿态,通过控制平衡油缸(2)出杆长度调节上平台(5)使其与甲板平行;a架摆动油缸(4)一端铰接于a架底座(1),另一端铰接于a架主梁(3)上,通过控制摆动油缸(4)出杆长度控制a架主梁(3)舷内外角度;上平台(5)铰接止荡器部分,同时通过纵摇油缸(6)控制止荡器纵摇幅度;纵摇油缸(6)一端铰接于上平台(5),另一端铰接于止荡器中的摆动架(7),通过控制纵摇油缸(6)出杆长度控制止荡器的纵向摆幅。
3.根据权利要求1所述的用于水下机器人的回收布放装置,其特征在于,止荡器包括摆动架(7)、下支撑(8)和导接头旋转件(9);摆动架(7)铰接于上平台(5)并靠纵摇油缸(6)减缓纵向摆幅,摆动架(7)中的垂向方管(703)和下支撑(8)中的左右垂向方管(802)滑动连接;导接头旋转件(9)与下支撑(8)的下回转支承(803)的外圈固定连接,用于对接水下机器人。
4.根据权利要求3所述的用于水下机器人的回收布放装置,其特征在于,摆动架(7)包括上梁(701)、横摇油缸(702)、垂向方管(703)、上回转支承(704)、横杆(705)、滑轮(706)、连接架(707)、中间支撑架(708);
5.根据权利要求4所述的用于水下机器人的回收布放装置,其特征在于,上回转支承(704)分为上回转支承内圈和上回转支承外圈;上回转支承内圈和上回转支承外圈能相互转动,上回转支承外圈固定安装在中间支撑架(708)上,上回转支承内圈与连接架(707)固定连接;当出绳方向改变,上回转支承内圈转动,带动连接架(707)转动,实现缆绳的换向。
6.根据权利要求3所述的用于水下机器人的回收布放装置,其特征在于,下支撑(8)包含支撑板(801)、左右垂向方管(802)、下回转支承(803)、齿轮(804)和液压马达(805);支撑板(801)与左右垂向方管(802)固定连接,下回转支承(803)包含下回转支承外圈和下回转支承内圈,下回转支承外圈和下回转支承内圈能相对转动;下回转支承内圈与支撑板(801)固定连接,下回转支承外圈为齿轮结构且与齿轮(804)配合安装,齿轮(804)与液压马达(805)的输出轴固定连接;液压马达(805)固定安装在支撑板(801)上;当液压马达(805)的主轴转动时,带动齿轮(804)转动,进而带动下回转支承(803)的外圈齿轮转动,从而实现导接头旋转件的转动来调节水下机器人的朝向。
7.根据权利要求3所述的用于水下机器人的回收布放装置,其特征在于,垂向方管(703)和下支撑(8)中的左右垂向方管(802)内部设置有伸缩油缸,伸缩液压缸一端铰接于所述摆动架垂向方管(703)内,另一端固定在所述下支撑(8)中的左右垂向方管(802)中;伸缩油缸用于控制下支撑(8)的纵向升降。
8.根据权利要求3所述的用于水下机器人的回收布放装置,其特征在于,导接头旋转件(9)包含导接头筒体(901)、底板(903)、可移动缓冲盘(904)、橡胶球(905)、尼龙导缆筒(906)和橡胶垫(908);
9.根据权利要求8所述的用于水下机器人的回收布放装置,其特征在于,导接头旋转件(9)还包括卡钳(902)、卡钳液压缸(907);导接头筒体(901)上的凸台位置设置有空槽,铰接安装卡钳(902),卡钳液压缸(907)铰接安装在卡钳(902)上,通过调整卡钳液压缸(907)出杆长度,带动卡钳(902)实现解锁和锁死的功能。
10.根据权利要求4所述的用于水下机器人的回收布放装置,其特征在于,上梁(701)为四根方管焊接成的矩形框,矩形框中间有间隔,使摆动架(7)中的横杆(705)与垂向方管(703)在止荡器随动时不与其他部位干涉。
技术总结
本发明属于水下机器人回收布放领域,具体是一种用于水下机器人的回收布放装置。包括A型架和止荡器;A型架和止荡器铰接,A型架用于安装止荡器并利用A架摆动油缸实现从舷内到舷外的变幅,止荡器用于固定水下机器人和减小水下机器人的摇晃。A型架包括A架底座、平衡油缸、A架主梁、A架摆动油缸、上平台和纵摇油缸;止荡器包括摆动架、下支撑和导接头旋转件。与现有技术相比,本发明通过将纵摇油缸铰接在上平台上能实现大力臂的纵摇止荡,防止由于增大力臂造成的钢结构悬空,增强了结构稳定性;摆动架左右对称的横摇油缸同时分摊止荡力,使其更高效的完成横摇止荡。
技术研发人员:陆宝春,冯毅,葛杨元,于世建,蒋炎,翁朝阳
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!