一种船舶吃水深度测量方法及系统
本发明属于船舶测量,尤其涉及一种船舶吃水深度测量方法及系统。
背景技术:
1、船舶吃水一般指船舶浸在水里的深度,具体指船舶底部至船体与水面相连处的垂直距离。传统测量方法以“水尺法”为主,在船舶的船艏、船舯、艉舷外分别设置水尺,通过水尺读数可以计算船舶吃水深度。以此也可计算出船舶前后排水量,装载的货物量重量。“水尺法”测量方式受制于船舶吃水深度数据自动检测技术和装备技术水平,检测方式还是以人工观察船舶吃水线和安检人员登船现场测量为主,此种方法虽然简单便捷,但是存在很大的弊端。人工测量方法受能见度、天气和水波等客观因素的影响较大,导致测量误差大,准确性和可靠性低,而且效率比较低。
技术实现思路
1、本发明的目的在于提供一种船舶吃水深度测量方法及系统,可以实现非接触性实时视觉自动测量船舶吃水深度的功能,解决人工测量效率低,受外界条件影响较大的问题。
2、本发明是通过以下技术方案实现的:
3、一种船舶吃水深度测量方法,包括:
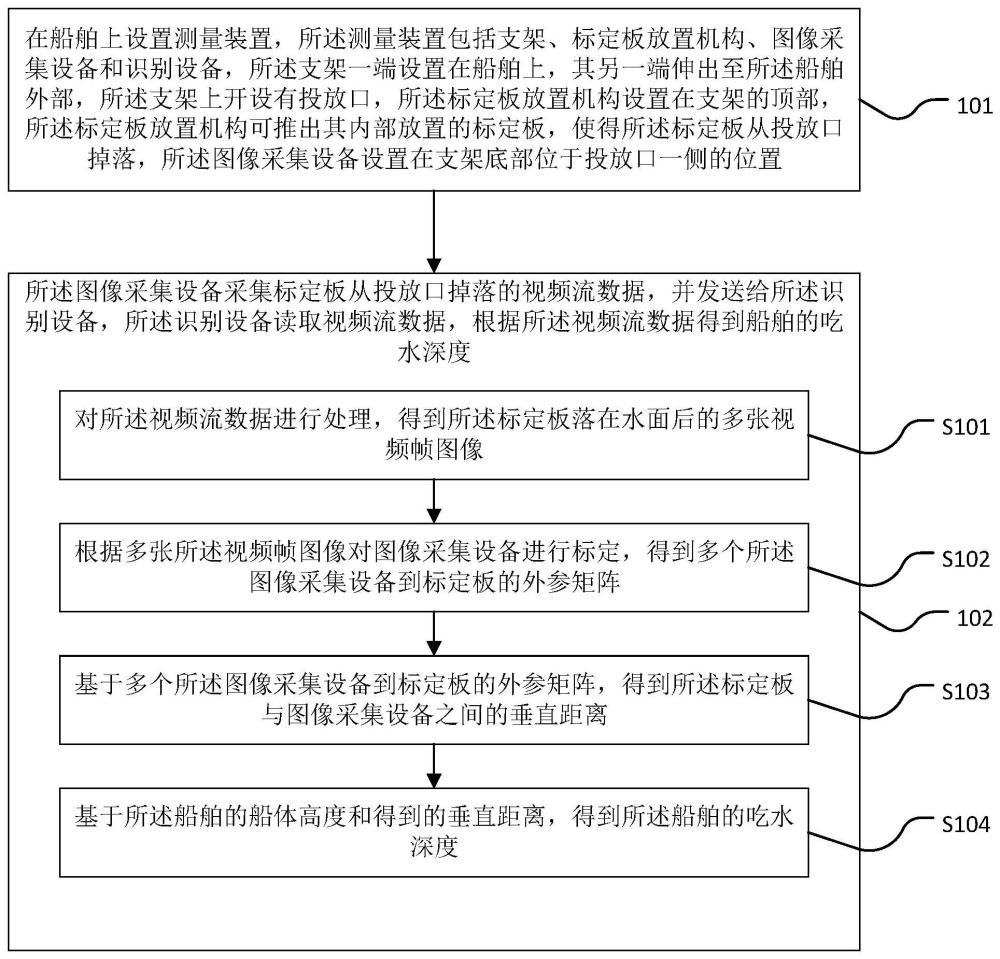
4、步骤101、测量装置包括支架、标定板放置机构、图像采集设备和识别设备,支架一端设置在船舶上,其另一端伸出至船舶外部,支架上开设有投放口,标定板放置机构设置在支架的顶部,标定板放置机构可推出其内部放置的标定板,使得标定板从投放口掉落,图像采集设备设置在支架底部位于投放口一侧的位置;
5、步骤102、图像采集设备采集标定板从投放口掉落的视频流数据,并发送给识别设备,识别设备读取视频流数据,根据视频流数据得到船舶的吃水深度;
6、其中,根据视频数据流得到船舶的吃水深度的过程如下:
7、s101、对视频流数据进行处理,得到标定板落在水面后的多张视频帧图像;
8、s102、根据多张视频帧图像对图像采集设备进行标定,得到多个图像采集设备到标定板的外参矩阵;
9、s103、基于多个图像采集设备到标定板的外参矩阵,得到标定板与图像采集设备之间的垂直距离;
10、s104、基于船舶的船体高度和得到的垂直距离,得到船舶的吃水深度。
11、进一步地,船舶包括船艏、船舯和船艉;
12、在船舶上设置测量装置的步骤包括:
13、在船艏左侧、船艏右侧、船舯左侧、船舯右侧、船艉左侧和船艉右侧分别设置测量装置;
14、图像采集设备采集标定板从投放口掉落的视频流数据,发送给识别设备,识别设备读取视频流数据,根据视频流数据得到船舶的吃水深度的步骤包括:
15、每个测量装置的图像采集设备采集标定板从投放口掉落的视频流数据,发送给识别设备,识别设备分别读取每个图像采集设备采集的视频流数据,并根据每个图像采集设备采集的视频流数据得到船艏左侧、船艏右侧、船舯左侧、船舯右侧、船艉左侧和船艉右侧的吃水深度。
16、进一步地,对视频流数据进行处理,得到标定板落在水面后的多张视频帧图像的步骤包括:
17、s1011、基于视频流数据得到多个视频帧图像,并将每个视频帧图像分离成前景区和背景区,前景区为标定板,背景区为水面;
18、s1012、在多个视频帧图像中依次获取一张视频帧图像作为目标图像;
19、s1013、分别计算目标图像的前景区和背景区的清晰度并进行对比,判断目标图像是否为标定板落在水面后的图像;
20、s1014、若是,选取目标图像以及从多个视频帧图像中选取排序在目标图像后的多张视频帧图像,得到标定板落在水面后的多张视频帧图像;
21、s1015、若否,则重复步骤s1012至步骤s1013,直到得到标定板落在水面后的多张视频帧图像。
22、进一步地,分别计算目标图像的前景区和背景区的清晰度的步骤中:
23、采用公式(2)分别计算目标图像前景区和背景区的清晰度,公式(2)如下所示:
24、e=∑x∑y[i(x+2,y)-i(x,y)]2 (2)
25、式中,e为清晰度,i(x,y)为像素点(x,y)处的灰度值。
26、进一步地,还包括移动终端;
27、识别设备分别读取每个图像采集设备采集的视频流数据,并根据每个图像采集设备采集的视频流数据得到船艏左侧、船艏右侧、船舯左侧、船舯右侧、船艉左侧和船艉右侧的吃水深度的步骤之后,方法还包括:
28、识别设备将得到的船艏左侧、船艏右侧、船舯左侧、船舯右侧、船艉左侧和船艉右侧的吃水深度发送至移动终端。
29、进一步地,标定板放置机构包括放置箱和电动伸缩杆,放置箱位于投放口靠近船舶的一侧,且设置在支架上,放置箱内放置有多个标定板,电动伸缩杆位于放置箱靠近船舶的一侧,且设置在支架上,放置箱靠近投放口的一侧底部开设有供标定板穿过的第一通孔,放置箱靠近电动伸缩杆的一侧底部开设有供电动伸缩杆穿过的第二通孔。
30、进一步地,标定放置机构还包括u型框,u型框的两端分别与放置箱靠近投放口的一侧壁连接。
31、进一步地,测量装置还包括第一夹具组件和第二夹具组件,第一夹具组件包括竖直板、水平板和夹板,竖直板和水平板连接呈l型,水平板可拆卸安装在支架上,竖直板上开设有两个第一长条孔,第一长条孔内设有贯穿其的第一螺丝推杆,第一螺丝推杆上设有与其螺纹连接的限位框,限位框套设于竖直板的外侧,夹板分别与两个第一螺丝推杆铰接,竖直板上位于两个第一长条孔之间的位置螺纹连接有第二螺丝推杆,第二螺丝推杆的一端上设有用于抵接夹板的压紧板,压紧板在第二螺丝推杆上可调整倾斜角度;
32、第二夹具组件的结构与第一夹具组件的结构相同,且第二夹具组件与第一夹具组件呈镜像对撑设置,第二夹具组件的水平板可拆卸安装在支架上且位置可调。
33、进一步地,测量装置还包括连接板,水平板远离竖直板的一端上开设有用于供连接板滑动的滑腔,连接板的两端分别滑动设置在两个水平板的滑腔内,水平板上设有用于固定或松开连接板的限位单元。
34、本发明还提供了一种船舶吃水深度测量系统,用于设置在船舶上,包括测量装置和识别设备,测量装置包括支架、标定板放置机构、图像采集设备和和识别设备,支架一端设置在船舶上,其另一端伸出至船舶外部,支架上开设有投放口,标定板放置机构设置在支架的顶部,标定板放置机构可推出其内部放置的标定板,使得标定板从投放口掉落,图像采集设备设置在支架底部位于投放口一侧的位置;
35、图像采集设备用于采集标定板从投放口掉落的视频流数据,发送给识别设备;
36、识别设备用于读取视频流数据,根据视频流数据得到船舶的吃水深度。
37、相比于现有技术,本发明的有益效果为:在需要测量船舶的吃水深度时,通过标定板放置机构推出标定板,使得标定板从投放口掉落,识别设备通过图像采集设备采集标定板从投放口掉落的视频流数据,得到船舶的吃水深度,方便快捷,可以实现非接触性实时视觉自动测量船舶吃水深度的功能,并且与现有方式相比,测量人员无需水下作业,所有工作均可在船舶上完成,解决人工测量效率低,受外界条件影响较大的问题,不需要大量数据集制作,只需要对视频流数据进行图像处理,成本较低,安装简单,方便拆卸和维护。
- 还没有人留言评论。精彩留言会获得点赞!