一种集群式AUV拉网清障系统及控制方法与流程
本发明属于自主水下航行器(auv)领域,具体涉及一种集群式auv拉网清障系统及控制方法。
背景技术:
1、拖网航行是单条或多条水面船只进行水面障碍清除、捕鱼、水下打捞等活动的一种基本作业形式,由于船只一般仅在水面或近水面处拖网,难以对悬浮于深水及接近海底的水下目标(如战争遗留的水雷、失事飞机残骸、沉船及其携带的物品)进行清除、打捞。auv作为一种潜航器,可在水下按预设任务或航路自主航行,且具有一定的运载和拖拉能力,由auv组成的集群可以在水下拖网,开展大深度处的水下作业。auv集群在水下拖网,需要集群中的各auv保持稳定的相对位置和队形。
2、目前,关于集群队形保持及其控制的方法中,所涉及的auv一般都是在个体不受约束的条件下的实现队形保持或变换,即集群中的单条auv在不受绳缆约束的条件下、相对自由地与其它auv组成线形队列、三角形队列或圆形队列等,而拖网航行显然还需要考虑清障网的相对形状及其对auv的影响。另外,目前的auv集群控制方法一般只考虑在二维平面内的队形保持,如公开号为cn113342014a的中国发明专利“一种用于滩头破障的水下航行器编队、系统及方法”,公开了由一定长度的具有柔韧性的缆绳连接两条水下航行器的双auv队列,但这种两条auv之间的协同运动控制方法无法扩展应用于在三维空间内拖网的多条auv组成的集群的队形控制。此外,现有auv集群控制技术一般依赖于水声通信,但目前的水声通信技术水平难以保证集群控制所需的高速率、低延时、高可靠通信的要求。因此,如何实现三维空间内的auv集群的队形保持控制是当前需要解决的重要技术问题。
技术实现思路
1、鉴于上述背景技术中存在的问题,本发明提供一种集群式auv拉网清障系统及控制方法,用以解决在绳网约束条件下,参与拖网的多条auv在三维空间内的协同控制问题。
2、本发明的技术方案为:
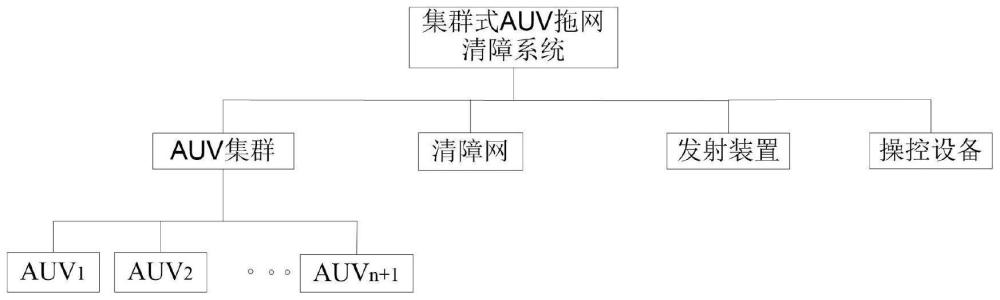
3、一种集群式auv拉网清障系统,包括auv集群、清障网、布放装置和操控设备;
4、所述auv集群由具备水下导航、定位、通信能力的auv组成;
5、所述清障网为正多边形,通过开口处的角点与各auv相连;
6、所述布放装置用于各auv入水前的存储,包括箱体、固定于箱体内的发射导杆以及连接于发射导杆上的固定支架,auv通过爆炸螺栓或者电磁吸合装置安装于固定支架上;
7、操控设备包括计算机和操控软件,用于对auv集群进行发射前的任务规划、参数装订以及auv集群处于水面时的遥控。
8、进一步地,所述auv集群中auv的数量保持在3个以上,每个auv均有唯一的识别号,各auv背部等距离安装有三个信号接收器,腹部安装有一个信号发射器。
9、进一步地,所述清障网的开口边缘安装通信线缆,形成环形的通信总线,每个auv与清障网连接的线缆中都包含通信线缆,利用该通信线缆挂接在环形通信总线上,每个auv都是该环形通信总线上的一个节点,可将自身状态信息及感知到的信息以广播的方式共享到总线上,每个auv都可从通信总线上获取其它auv共享的信息。
10、一种集群式auv拉网清障系统的控制方法,包括如下步骤:
11、步骤一:布放前,使用操控设备将auv集群的初始位置及预设航路信息装订到各auv的控制计算机中;
12、步骤二:布放时,通过起爆auv与固定支架连接处的爆炸螺栓,或打开电磁吸合装置,使各auv与固定支架分离,auv集群入水后调整其航向和深度至设定值;
13、步骤三:auv分离后形成预设队形,清障网张开,各auv通过调整自身的速度和航向保持队形稳定,拉动张开的清障网沿预设的航路航行,进行水下障碍物扫除作业;
14、步骤四:清障网被水下目标物阻止后,缠绕在目标物上,拉网的auv绕目标物回旋后爆炸,实现对水下障碍的破除。
15、进一步地,所述步骤三中各auv保持队形稳定的方法具体为:确定一个或多个auv为领队,使其按设定的任务及预先规划的航路航行,其余auv作为跟随者,以领队的位置和速度为参照,调整自身的速度和方向。
16、进一步地,确定领队与跟随者的方法包括如下步骤:
17、1)计算各auv在集群中的偏离度,所述偏离度表示当前auv相对于集群中其它auv的相对距离和相对方位角的加权和;
18、2)单条auv将计算得到的偏离度及自身的识别号,以广播的方式发送给其余auv;
19、3)收到偏离度信息的auv对其余每个auv的偏离度按由小到大的顺序进行排序,对偏离度小于或等于阈值s*的auv,向其发送值为“1”的选票信息;否则,发送值为“0”的选票信息,s*取为偏离度的中位数;
20、4)各auv获得其余auv发来的选票信息,合计得到半数及以上“1”选票的auv即为领队,否则为跟随者。
21、进一步地,所述步骤1)中计算各auv的偏离度包括如下子步骤:
22、1.1)计算当前auv相对于集群中其余auv的方位角
23、
24、其中θki表示当前auv相对于第i个auv的相对方位角;
25、1.2)计算当前auv相对于集群中其余auv的相对距离
26、
27、当上式中时,取δrk=0;
28、其中rki表示当前auv相对于第i个auv的实际距离,表示正多边形中当前auv所在的点到第i个顶点的理论距离;
29、1.3)计算当前auv在集群中的偏离度,如下式所示
30、sk=p1δrk+p2δθk
31、其中,p1和p2分别为相对距离和相对方位角的加权系数。
32、进一步地,确定为跟随者的auv以领队的位置和速度为参照,调整自身的速度和方向,对于第i个auv,假设集群中有m个领队auv,第i个auv相对于第j个领队auv的相对方位为θij,vi0为第i条auv当前的速度,则下一控制周期中的期望速度为
33、
34、其中,kθ速度调节的比例系数。
35、进一步地,确定为跟随者的auv以领队的位置和速度为参照,调整自身的速度和方向,对于第i个auv,设其当前时刻俯仰角与偏航角的合成航向角为假设集群中有m个领航auv,则下一控制周期中第i个auv的期望合成航向角度为
36、
37、其中,为第i个auv相对于第j个领队auv的理论相对位置矢量,kr为合成航向角调节的比例系数。
38、进一步地,实际使用过程中,根据auv的速度及合成航向角的上、下限幅值对计算得到的速度和合成航向角进行限幅。
39、本发明的有益技术效果为:
40、1、本发明以轻量化、低成本的auv集群为基本清障单元,以拖网的形式,按照自主规划的航路,对特定区域的水下障碍物(如渔网、渔桩、沉船、战争遗留的水雷等)进行清除,解决了清除水下障碍物遇到的目标精准定位难度大、破除困难、危险性高等问题,提高了清障的安全性和自动化水平。相比传统的采用专用船只安装大型专用设备的清障方案,本发明操作简单、效率高、成本低。
41、2、本发明拖网的auv集群,利用清障网的结构,通过有线通信保证auv之间的可靠通信,通过总线形式的通信使得avu之间可相互共享信息。
42、3、本发明所述auv集群控制方法同样可应用于没有网约束条件下的auv集群的队形保持,本发明还可拓展用于水下打捞、军事物资水下隐蔽运输等场景。
- 还没有人留言评论。精彩留言会获得点赞!