一种用于无人潜航器的波动式推进装置
本发明涉及动力装置,尤其涉及一种用于无人潜航器的波动式推进装置。
背景技术:
1、随着国内海洋石油工程、水下勘探、水下打捞等领域对无人潜航器使用需求的不断扩大,无人潜航器领域迅速发展。推进装置作为无人潜航器的动力系统,其使用性能在一定程度上直接决定了无人潜航器的实际水下作业能力。目前,无人潜航器大多以螺旋桨为推进装置,虽然驱动方便,但是存在能耗高、噪声大、环境适应性差、机动性差等不足,在实际水下作业过程中有一定的局限性。基于鳐科鱼类胸鳍波动仿生原理的水下推进装置,在机动性模式、推进效率及适应能力等方面相较于传统螺旋桨推进装置具有显著的优越性。但是,目前采用胸鳍波动仿生原理的水下推进装置设计复杂,主要依靠微电子系统控制电机驱动,存在运动稳定性差及环境适应性差的缺点。
技术实现思路
1、为克服现有基于胸鳍波动仿生原理的推进装置设计复杂、运动稳定性差及环境适应性差的技术缺陷,本发明提供了一种用于无人潜航器的波动式推进装置。
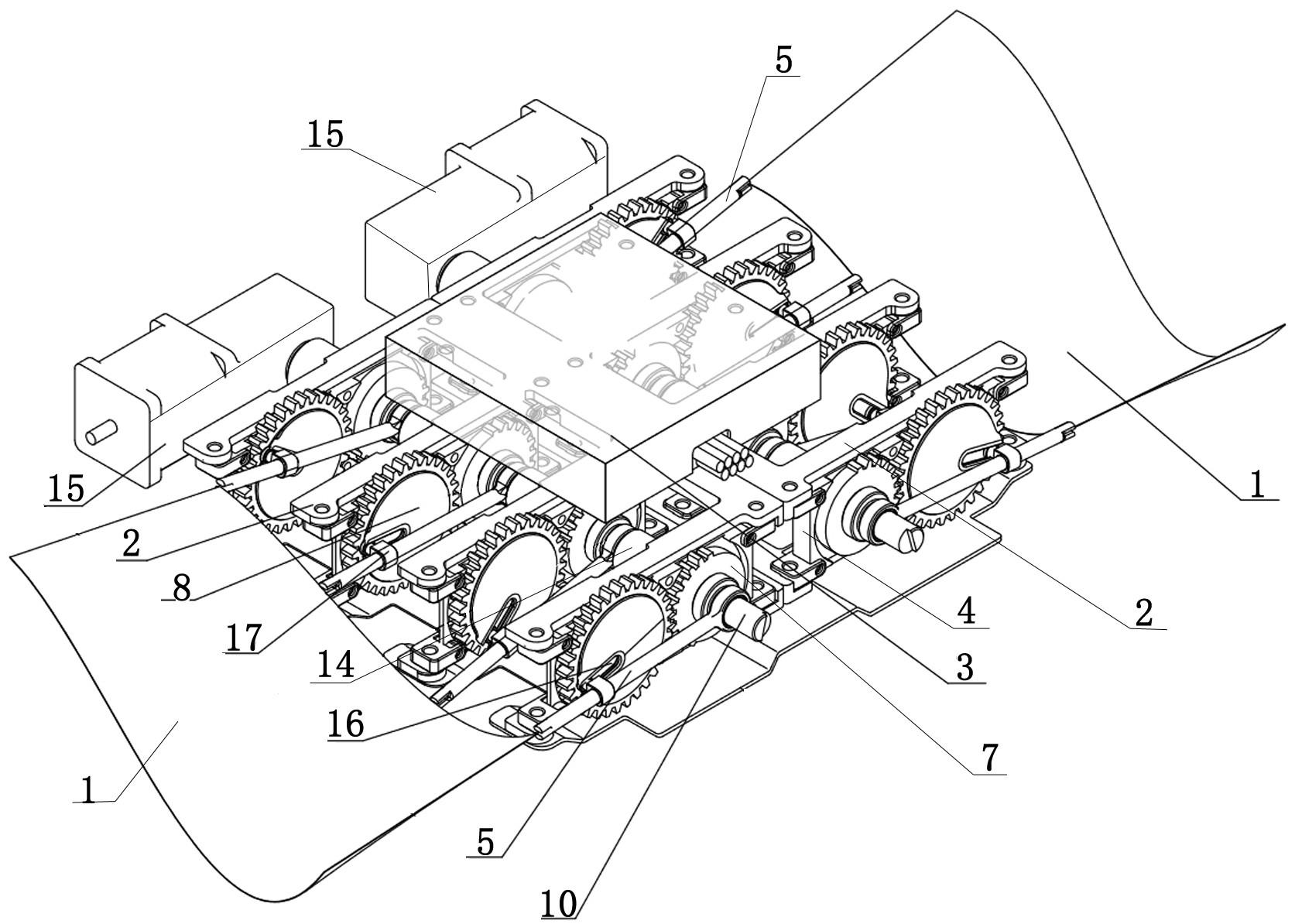
2、本发明提供了一种用于无人潜航器的波动式推进装置,包括偶数个驱动组件、两个推进鳍片、机架以及控制系统,偶数个驱动组件分成两组分别固定连接至机架的左右两侧,两个推进鳍片分别安装至机架左右两侧的驱动组件上,每一组中的驱动组件沿前后方向排为一列,两组驱动组件关于机架的中线镜像对称布置;驱动组件包括背板、摆杆、第一不完全齿轮、第二不完全齿轮、第一圆柱齿轮、第二圆柱齿轮、第一传动轴和第二传动轴,背板位于竖直方向且固定安装至机架上,第一传动轴和第二传动轴均穿置在背板上且与背板转动配合,第一传动轴位于背板的靠里侧,第二传动轴位于背板的靠外侧,第一不完全齿轮和第二不完全齿轮通过第一传动轴分别安装至背板前后两侧,第一不完全齿轮和第二不完全齿轮通过键槽与第一传动轴固定连接,第一不完全齿轮和第二不完全齿轮均为一半圆周上设置有轮齿的齿轮,且第一不完全齿轮和第二不完全齿轮的轮齿呈互补式分布,第一圆柱齿轮和第二圆柱齿轮通过第二传动轴分别安装至背板前后两侧,且第一圆柱齿轮和第二圆柱齿轮均与第二传动轴固定连接,第一圆柱齿轮可与第一不完全齿轮的轮齿啮合,第二圆柱齿轮通过第三圆柱齿轮可与第二不完全齿轮的轮齿实现啮合,第三圆柱齿轮通过转轴安装至背板的后侧,且转轴位于第一传动轴和第二传动轴的轴心连线上,同一组驱动组件上相邻的第一传动轴之间通过联轴器相连,两组分别相连后的第一传动轴均配合有驱动电机,控制系统为机载微型计算设备用于控制驱动电机,以使摆杆在第一圆柱齿轮的驱动下实现在一定角度范围内的可调摆角摆动,控制系统固定连接至机架上;第一圆柱齿轮的前侧壁上沿其半径所在方向开有滑槽,滑槽中滑动配合有滑块,摆杆的一端通过轴套与第一传动轴转动配合,摆杆的另一端穿过滑块后与对应位置处的推进鳍片固定连接,同一组中相邻驱动组件的摆杆初始位置预设φ的动作相位差;第一不完全齿轮和第二不完全齿轮的齿数相等均为z1,第一圆柱齿轮和第二圆柱齿轮的齿数相等均为z2,第一不完全齿轮和第一圆柱齿轮的模数相等均为m1,第二不完全齿轮、第二圆柱齿轮以及第三圆柱齿轮的模数相等均为m2,且m1>m2,第三圆柱齿轮的齿数为z3;
3、其中动作相位差φ以使单侧相邻的驱动组件的摆杆相错摆动,继而带动推进鳍片使其产生波浪形运动,假设单侧驱动组件的数量为t,使推进鳍片形成n个完整的波形,其中n可为整数或分数,则动作相位差φ的大小满足以下关系:
4、φ=360×n/(t-1) (1);
5、其中齿数z1、z2满足关系:
6、 (2);
7、式(2)中,β为摆杆的最大摆角,其值可根据实际应用要求进行修改,β的范围为(0,90°];
8、齿数z3满足关系:
9、 (3);
10、为保证第一不完全齿轮与第一圆柱齿轮能正常啮合,需对第一不完全齿轮的首、末齿进行齿顶圆修型,齿顶圆修型后的半径d1计算如下:
11、 (4);
12、为保证第二不完全齿轮与第二圆柱齿轮能正常啮合,需对第二不完全齿轮的首、末齿进行齿顶圆修型,齿顶圆修型后的半径d2计算如下:
13、 (5);
14、式(4)、(5)中:α为齿顶圆的压力角,计算公式如下:
15、 (6);
16、滑槽的首端与第一圆柱齿轮的圆心之间的距离为l0,滑槽的长度为l1,则摆杆的最大摆动角度αmax由下式得出:
17、 (7)。
18、偶数个驱动组件均分为两组分别用于驱动推进鳍片,其中同一组驱动组件的多根摆杆均与对应位置处的推进鳍片固定连接,具体的摆杆的外端部通过固定扣件连接推进鳍片。偶数个驱动组件以及两片推进鳍片均以机架的中线镜像对称分布,其中机架的中线就是潜航器的对称中心线,驱动组件在控制系统的带动下,能驱动推进鳍片以类似正弦波的形式摆动,同一组中相邻驱动组件的摆杆初始位置预设一定的动作相位差也是为了推动鳍片的摆动动作能更接近鳐鱼在水中的游动动作;两片推进鳍片如同鳐鱼身体两侧的鳍片一样摆动,实现波动式推进,通过设计调节整体结构的尺寸参数,还可实现摆杆可调角度极限值的变化,进而带动推进鳍片实现对潜航器包括前进、后退、上浮、下沉、转弯、悬停及原地旋转的可控驱动。
19、本发明提供的技术方案与现有技术相比具有如下优点:
20、一、本发明通过机械结构设计实现了基于胸鳍波动仿生原理的水下推进装置,整体结构简单紧凑,操作便捷,提升了无人潜航器推进装置的运动稳定性与可靠性。
21、二、本发明通过对称分布的偶数组驱动组件和两组推进鳍片形成的推进装置,能使无人潜航器在水下实现前进、后退、上浮、下沉、悬停、转弯及原地旋转运动,适用于不同环境的水下作业,具有运动灵活、转弯半径小、实际负载能力大、可拓展性强的特点,提升了机械式仿生鳐鱼无人潜航器的环境适用性。
22、三、本发明所设计的驱动组件,包括两个不完全分布轮齿,在前半周旋转过程中,第一不完全齿轮有齿的一侧与第一圆柱齿轮啮合,使得第一圆柱齿轮与第一不完全齿轮反向旋转;在后半周旋转过程中,第二不完全齿轮无齿的一侧与第三圆柱齿轮啮合,使得第二圆柱齿轮与第二不完全齿轮同向旋转,驱动组件能实现换向驱动,进而有效地将整圈圆周运动通过不完全分布轮齿转变为往复半圆周运动,实现了摆杆的上下摆动功能,进而使无人潜航器推进装置实现前进、后退、上浮、下沉、转弯、悬停及原地旋转等多种运动模式。
技术特征:
1.一种用于无人潜航器的波动式推进装置,其特征在于,包括偶数个驱动组件、两个推进鳍片(1)、机架(2)以及控制系统(3),偶数个驱动组件分成两组分别固定连接至机架(2)的左右两侧,两个推进鳍片(1)分别安装至机架(2)左右两侧的驱动组件上,每一组中的驱动组件沿前后方向排为一列,两组驱动组件关于机架(2)的中线镜像对称布置;驱动组件包括背板(4)、摆杆(5)、第一不完全齿轮(6)、第二不完全齿轮(7)、第一圆柱齿轮(8)、第二圆柱齿轮(9)、第一传动轴(10)和第二传动轴(11),背板(4)位于竖直方向且固定安装至机架(2)上,第一传动轴(10)和第二传动轴(11)均穿置在背板(4)上且与背板(4)转动配合,第一传动轴(10)位于背板(4)的靠里侧,第二传动轴(11)位于背板(4)的靠外侧,第一不完全齿轮(6)和第二不完全齿轮(7)通过第一传动轴(10)分别安装至背板(4)前后两侧,第一不完全齿轮(6)和第二不完全齿轮(7)通过键槽与第一传动轴(10)固定连接,第一不完全齿轮(6)和第二不完全齿轮(7)均为一半圆周上设置有轮齿的齿轮,且第一不完全齿轮(6)和第二不完全齿轮(7)的轮齿呈互补式分布,第一圆柱齿轮(8)和第二圆柱齿轮(9)通过第二传动轴(11)分别安装至背板(4)前后两侧,且第一圆柱齿轮(8)和第二圆柱齿轮(9)均与第二传动轴(11)固定连接,第一圆柱齿轮(8)可与第一不完全齿轮(6)的轮齿啮合,第二圆柱齿轮(9)通过第三圆柱齿轮(12)可与第二不完全齿轮(7)的轮齿实现啮合,第三圆柱齿轮(12)通过转轴(13)安装至背板(4)的后侧,且转轴(13)位于第一传动轴(10)和第二传动轴(11)的轴心连线上,同一组驱动组件上相邻的第一传动轴(10)之间通过联轴器(14)相连,两组分别相连后的第一传动轴(10)均配合有驱动电机(15),控制系统(3)为机载微型计算设备用于控制驱动电机(15),以使摆杆(5)在第一圆柱齿轮(8)的驱动下实现在一定角度范围内的可调摆角摆动,控制系统(3)固定连接至机架上;第一圆柱齿轮(8)的前侧壁上沿其半径所在方向开有滑槽(16),滑槽(16)中滑动配合有滑块(17),摆杆(5)的一端通过轴套与第一传动轴(10)转动配合,摆杆(5)的另一端穿过滑块(17)后与对应位置处的推进鳍片(1)固定连接,同一组中相邻驱动组件的摆杆(5)初始位置预设φ的动作相位差;第一不完全齿轮(6)和第二不完全齿轮(7)的齿数相等均为z1,第一圆柱齿轮(8)和第二圆柱齿轮(9)的齿数相等均为z2,第一不完全齿轮(6)和第一圆柱齿轮(8)的模数相等均为m1,第二不完全齿轮(7)、第二圆柱齿轮(9)以及第三圆柱齿轮(12)的模数相等均为m2,且m1>m2,第三圆柱齿轮(12)的齿数为z3;
技术总结
本发明涉及动力装置技术领域,尤其涉及一种用于无人潜航器的波动式推进装置,其包括偶数个驱动组件、两个推进鳍片、机架以及控制系统,偶数个驱动组件分成两组分别固定连接至机架的左右两侧;驱动组件包括背板、摆杆、第一不完全齿轮、第二不完全齿轮、第一圆柱齿轮、第二圆柱齿轮、第一传动轴和第二传动轴,控制系统为机载微型计算设备用于控制驱动电机,以使摆杆在第一圆柱齿轮的驱动下实现在一定角度范围内的可调摆角摆动;第一圆柱齿轮的前侧壁上开有滑槽,滑槽中配合有滑块,摆杆一端与第一传动轴转动配合,摆杆另一端穿过滑块后与推进鳍片固定连接。该装置能使无人潜航器在水下实现前进、后退、上浮、下沉、悬停、转弯及原地旋转运动。
技术研发人员:马秀彦,梁国星,黄永贵,吕旭峰,钟汉青,刘佳,郭策,赵东元,左舒琪,李昊宇,崔哲瑜,李博闻,宋晟榕
受保护的技术使用者:太原理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!