一种带有水压检测功能的水下生物机器人
本发明属于水下生物机器人,具体为一种带有水压检测功能的水下生物机器人。
背景技术:
1、水下机器人,也称无人遥控潜水器,是一种工作于水下的极限作业机器,由于水下环境恶劣危险,且人类的潜水深度有限,因此,水下机器人已成为开发海洋、河流的重要工具。
2、在专利授权公告号为cn216734714u的实用新型专利中公布了一种水下巡检机器人,包括壳体、驱动系统、航行控制系统、下潜系统和图像采集系统;壳体的前端和尾端分别设有前罩和尾罩;图形采集系统包括设置于前罩内的摄像模块;驱动系统包括设置于尾罩后端的旋翼和位于尾罩内用于驱动旋翼旋转的行进驱动电机;航行控制系统包括设置于壳体前部两侧的前部升降舵、设置于尾罩后端后部升降舵和方向舵、设置于尾罩内用于控制前部升降舵和后部升降舵摆动的升降舵机以及用于控制方向舵摆动的转向舵机;下潜系统包括位于壳体内的水舱和用于控制水进入或排出水舱的下潜控制机构;本巡检机器人能够下潜到水下设定位置,对水下建筑物的裂缝、孔洞等进行巡检,提高大坝、桥梁等水下结构的安全性。
3、但是,现有的水下生物机器人也存在一定的不足,首先,现有的水下生物机器人多采用摄像头对水下环境进行观察使用,由于水体中杂质较多,长时间使用易造成摄像头拍摄模糊的问题,且水下生物机器人上装配的照明灯也多为固定安装,难以对照明等的角度进行调整,不便于水下生物机器人的照明使用;其次,现有的水下生物机器人多采用螺栓等对水压检测器进行固定,由于水流的冲击及振动的外界因素影响,长时间使用会造成螺栓的振动松脱的问题。因此,需要对现有技术进行改进。
技术实现思路
0、
技术实现要素:
1、本发明的目的就在于为了解决上述问题而提供一种带有水压检测功能的水下生物机器人,解决了背景技术中提到的问题。
2、为了解决上述问题,本发明提供了一种技术方案:
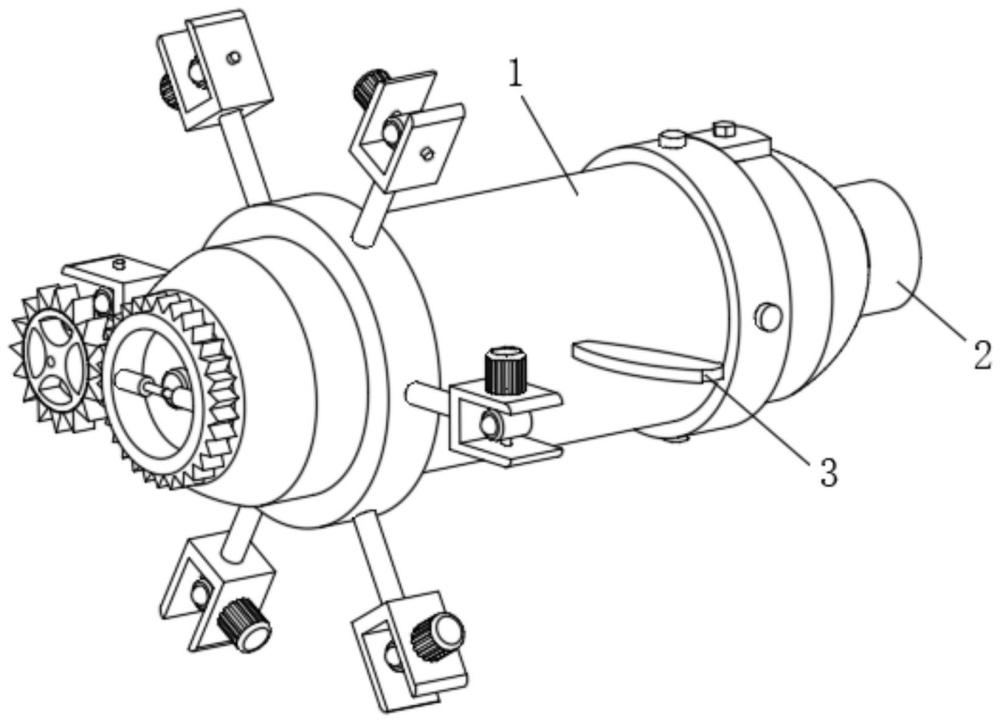
3、一种带有水压检测功能的水下生物机器人,包括壳体、驱动器、生物鳍、清理机构、照明机构和水压检测机构,所述壳体上设置有驱动器,所述壳体上设置有生物鳍,所述壳体上设置清理机构,所述壳体上设置有照明机构,所述壳体上设置有水压检测机构。
4、作为优选,所述清理机构包括限位环槽、限位滑球、转动环、齿牙、电机一、齿轮、固定筒、限位滑槽、电机二、螺纹杆、支撑杆、固定块、顶杆、导向球、弹簧一、顶板、弹簧二和刷毛,所述壳体内开设有限位环槽,所述限位环槽内滑动连接有限位滑球,所述限位滑球上固定连接有转动环,所述转动环与壳体滑动连接,所述转动环上固定连接有齿牙,所述壳体上固定安装有电机一,所述电机一的输出轴与壳体转动连接,所述转动环内固定连接有固定筒,所述固定筒内开设有限位滑槽,所述转动环内固定安装有电机二,所述电机二的输出端上固定连接有螺纹杆,所述螺纹杆的外侧通过螺纹连接有支撑杆,所述支撑杆与固定筒滑动连接,通过电机二驱动螺纹杆进行转动,在螺纹连接的关系下,可推动支撑杆沿固定筒内壁移动,且支撑杆受力带动固定块移动,以带动导向球沿限位滑槽内壁滑动,以保证支撑杆的移动稳定,且导向球受力推动顶杆移动,弹簧一受力形变,在弹簧一的形变作用下,可推动导向球始终与限位滑槽接触,以保证导向球的导向效果。
5、作为优选,所述支撑杆上固定连接有固定块,所述固定块内滑动连接有顶杆,所述顶杆上固定连接有导向球,所述导向球与限位滑槽滑动连接,所述顶杆上焊接有弹簧一,所述弹簧一的另一端与支撑杆焊接,所述支撑杆内滑动连接有顶板,所述顶板上焊接有弹簧二,所述弹簧二的另一端与支撑杆焊接,所述顶板上固定连接有刷毛,所述刷毛与壳体上的摄像头接触,当支撑杆受力移动时,可带动顶板进行移动,进而带动刷毛移动,当刷毛与壳体上的摄像头边缘处接触时,刷毛受力推动顶板移动,弹簧二受力形变,最终使得刷毛与壳体上的摄像头镜面接触。
6、作为优选,所述电机一的输出轴外侧固定套接有齿轮,所述齿轮与齿牙啮合,通过啮合的关系,当齿轮受力转动时,可推动转动环进行转动。
7、作为优选,所述刷毛设置有多个,多个所述刷毛在顶板上均匀分布,通过刷毛的设置,可对壳体上的摄像头进行杂质清理。
8、作为优选,所述照明机构包括固定环、固定座、电机三、照明灯、支撑轴、卡孔、移动板、卡球和弹簧三,所述壳体的外侧固定套接有固定环,所述固定环上固定连接有固定座,所述固定座上固定安装有电机三,所述电机三的转动端与固定座转动连接,所述电机三的转动端上固定连接有照明灯,所述照明灯上固定连接有支撑轴,所述支撑轴与固定座转动连接,所述电机三的转动端内开设有卡孔,所述固定座内滑动连接有移动板,所述移动板上固定连接有卡球,所述卡球与卡孔滑动连接,所述移动板上焊接有弹簧三,所述弹簧三的另一端与固定座焊接,通过照明灯的设置,可赋予水下生物机器人良好的照明效果,便于作业人员对水下环境进行观测处理,启动电机三驱动转动端进行转动,以带动照明灯进行转动,进而对照明灯的位置进行调整,在此过程中,卡孔受力挤压卡球,卡球受力推动移动板移动,弹簧三受力形变,最终使得卡球脱离卡孔,在力的作用下,卡球沿电机三的转动端表面滑动,当卡球滑入下一卡孔处时,弹簧三恢复形变,以推动卡球插入卡孔,对电机三的转动端进行限位,进而对照明灯的位置进行精准控制使用。
9、作为优选,所述卡孔设置有多个,多个所述卡孔在电机三的转动端上呈环形阵列排布,通过卡孔的设置,便于配合卡球进行卡接使用。
10、作为优选,所述水压检测机构包括连接环、水压检测器、固定板、螺栓、卡槽、卡杆、弹簧四和端杆,所述壳体的外侧滑动套接有连接环,所述连接环上设置有水压检测器,所述连接环上固定连接有固定板,所述固定板内活动连接有螺栓,所述螺栓与壳体通过螺纹连接,所述螺栓内开设有卡槽,所述固定板内滑动连接有卡杆,所述卡杆与固定板滑动连接,所述卡杆与卡槽滑动连接,所述卡杆的外侧设置有弹簧四,所述卡杆上固定连接有端杆,通过推动连接环套给于壳体上,使得固定板与壳体接触,然后拉动端杆向远离固定板的方向移动,以带动卡杆移动,弹簧四受力形变,再推动螺栓穿过固定板,使得螺栓与壳体接触,转动螺栓,在螺纹连接的关系下,对螺栓进行固定,进而对固定板进行锁紧,使得固定板带动连接环处于稳定状态,并松开端杆使得弹簧四恢复形变,以推动卡杆插入卡槽,对螺栓进行插接限位,避免螺栓的振动松脱问题,在水压检测器的作用下,可对水体进行压力检测使用。
11、优选的,所述卡槽设置有多个,多个所述卡槽在螺栓上呈环形阵列排布,通过卡槽的设置,便于配合卡杆进行卡接使用。
12、优选的,所述弹簧四的一端与固定板焊接,所述弹簧四的另一端与卡杆焊接,通过弹簧四的设置,可对卡杆进行连接使用。
13、本发明的有益效果是:本发明涉及一种带有水压检测功能的水下生物机器人,不仅具有对水体进行压力检测的功能,还可提高水下生物机器人的照明效果,并可对壳体上的摄像头进行清灰的特点,在具体的使用中,与传统的带有水压检测功能的水下生物机器人相比较而言,具有以下有益效果:
14、首先,通过设置清理机构、限位环槽、限位滑球、转动环、齿牙、电机一、齿轮、固定筒、限位滑槽、电机二等结构,通过电机二驱动螺纹杆进行转动,以推动支撑杆进行移动,使得支撑杆露出固定筒,在电机一、齿轮等结构的作用下,可带动转动环进行转动,进而带动支撑杆进行转动,使得刷毛沿壳体上的摄像头表面滑动,对摄像头上附着的杂质进行清理。
15、其次,通过设置照明机构、固定环、固定座、电机三、照明灯、支撑轴、卡孔等结构,通过照明灯的设置,可对水下周围环境进行照明处理,在电机三、支撑轴等结构的作用下,可驱动照明灯进行转动,进而对照明等的位置进行调整使用,以提高水下生物机器人的照明效果。
16、再者,通过设置水压检测机构、连接环、水压检测器、固定板、螺栓、卡槽、卡杆等结构,通过螺栓的设置,可对固定板进行锁紧固定,使得连接环带动水压检测器处理安装稳定状态,便于水下生物机器人对水体进行压力检测使用,在卡杆、卡槽等结构的作用下,可对螺栓进行插接限位,避免螺栓的振动松脱问题。
- 还没有人留言评论。精彩留言会获得点赞!