一种智能船舶主动减摇装置及其控制方法与流程
本发明涉及一种船舶减摇领域,特别涉及一种智能航行船舶主动型船舶减摇系统及控制方法。
背景技术:
1、船舶在海中时刻受到来自风、浪、涌的作用,出现大幅度的横摇和纵摇运动,影响船员和乘客乘坐的舒适性,如果对这些运动控制不当,将会危及船舶航行和作业安全。船舶减摇装置通过不同方式减少船舶的摇动幅度,增加船舶航行的耐波性。传统的减摇鳍根据船舶的横摇信息调整鳍角,从而产生与环境扰动力相反的抵抗力和力矩用于减摇。但是抵抗力的产生,要求流体以一定的速度流过鳍面,因此传统减摇鳍在低航速和零航速时的减摇效果并不好,而零航速减摇鳍,零航速时采用类似“划桨”的动作进行减摇,鳍轴易磨损、噪音较大。因此,需要一种智能航行船舶主动型船舶减摇系统及控制方法,可实现零到全航速的船舶减摇,适用航速范围广,工作效率高,减摇效果好,耐用性强。
技术实现思路
1、针对上述问题,本发明提出了一种高效、适用性强的智能航行船舶主动减摇装置及其控制方法,以解决在零航速低航速时传统减摇鳍减摇效果差,而零航速减摇鳍鳍轴易磨损、噪音较大的问题。
2、本发明通过以下技术方案予以实现:
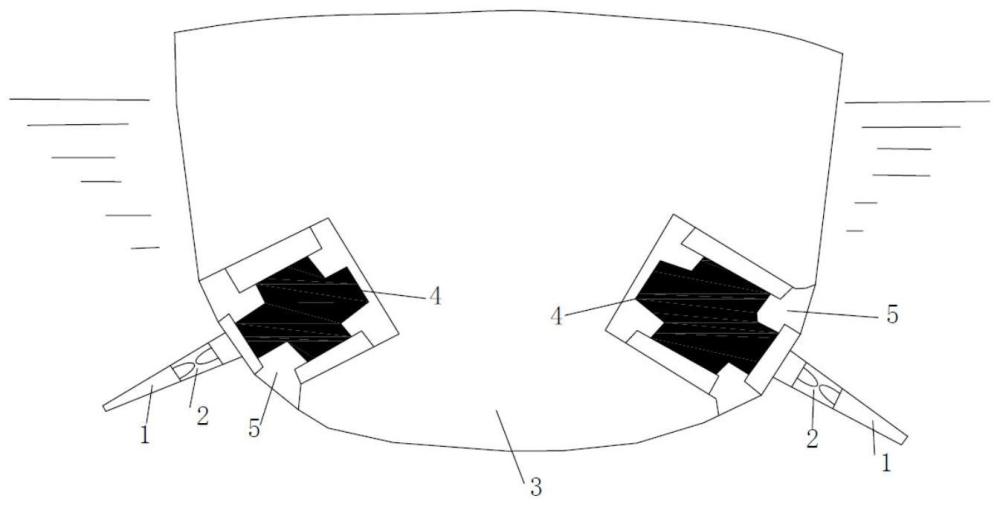
3、一种智能航行船舶主动减摇装置,包括船舶姿态传感器、dgps系统、船舶减摇控制箱、减摇鳍、转鳍装置、无轴轮缘推进装置、无轴轮缘推进器控制系统、减摇鳍控制系统,减摇鳍靠近鳍根部安装无轴轮缘推进装置,船舶减摇控制箱通过船舶减摇控制箱io单元和通讯线缆分别连减摇鳍控制系统和无轴轮缘推进器控制系统;船舶减摇控制箱还通过船舶减摇控制箱通讯单元和通讯线缆分别连接船舶姿态传感器和dgps系统;其中,船舶姿态传感器,用于实时监测船舶的横摇角度φ和角速度p以及角加速度q,并将得到的船舶的横摇角度φ和角速度p以及角加速度q信息传递给船舶减摇控制箱通讯单元;dgps系统,用于实时得到船舶的运动速度v,并将船舶运动的速度v通过通讯线缆传输至船舶减摇控制箱通讯单元,船舶减摇控制箱接收到船舶的横摇角度φ和角速度p以及角加速度q、航速v后,通过分配算法计算减摇鳍的鳍角α和无轴轮缘推进装置的转速n后,发送鳍角和转速信息至船舶减摇控制箱io单元,船舶减摇控制箱io单元将信号分别发送到减摇鳍控制系统和无轴轮缘推进器控制系统,减摇鳍控制系统和无轴轮缘推进器控制系统将鳍角α和转速n信息分别发送到转鳍装置和无轴轮缘推进器,转鳍装置和无轴轮缘推进装置控制鳍角和转速产生抵抗力矩减小船舶的横摇运动。
4、减摇鳍控制系统和无轴轮缘推进器控制系统将鳍角α和转速n通过通讯线缆反馈至船舶减摇控制箱io单元,船舶减摇控制箱将根据反馈的鳍角和转速信息和船舶横摇信息以及船速计算下一时刻的鳍角α和转速n,减摇鳍控制系统收到的鳍角信息后将其传递给转鳍装置使减摇鳍转动一定鳍角;轮缘推进器控制系统到的转速信息后,将其传递给控无轴轮缘推进装置。
5、dgps系统中的dgps接收机通过避雷器连接卫星天线,由卫星天线将船舶速度信息传递给dgps接收机,dgps接收机将船舶速度v信息传递给船舶减摇装置控制箱通讯单元。
6、一种智能船舶主动减摇装置的控制方法,采用智能航行船舶主动减摇装置,该方法包括:
7、(1)当船速大于vup时,减摇鳍能够提供足够的升力,利用减摇鳍进行减摇工作,无轴轮缘推进装置的转速n=0,vup为减摇鳍单独工作船速的下限,与减摇鳍的水动力特性相关,船舶减摇控制箱根据船舶的横摇角度φ和角速度p以及角加速度q合成鳍角信号α=k1*φ+k2*p+k3*q,其中k1、k2和k3为控制参数与船舶的特性有关,此时减摇鳍产生的减摇力矩mf=0.5*ρ*v2*a*l1*cα,其中cα为α角度下减摇鳍的升力系数,ρ为流体的密度,l1为减摇鳍鳍面受力中心距离船舶重心的力臂;
8、(2)当船舶航速低于vdown值时,减摇鳍几乎不产生升力,则完全依靠无轴轮缘推进装置产生推力抵抗船舶的横摇运动,vdown为轮缘推进器单独工作船速的上限,与减摇鳍的水动力特性相关,船舶减摇控制箱根据船舶的横摇角度φ和角速度p以及角加速度q合成转速信号n=k4*φ+k5*p+k6*q,其中k4、k5和k6为控制参数与船舶的特性有关,此时产生的减摇力矩mp=2*kt*ρ*n2*d4*l2,l2为轮缘推进装置中心与船舶重心的距离;
9、(3)当船舶的航速在vdown和vup之间时,减摇鳍产生的升力不足以抵抗横摇力矩时,无轴轮缘推进装置启动产生推力作为减摇鳍升力的补充共同抵抗船舶横摇运动,此时船舶减摇控制箱采用sqp算法分配减摇鳍的鳍角和无轴轮缘推进器的转速n,最优化方程及条件如下:
10、f=c1α2+c2n3
11、s.t.m=0.5*ρ*v2*a*l1*cα+2*kt*ρ*n2*d4*l2,
12、α≥α1,
13、-α≥-α2,
14、n≥n1,
15、-n≥-n2.
16、f为能耗方程,c1和c2分别为减摇鳍和轮缘推进器的能耗系数,m为需求的抵抗力矩,kt为无轴轮缘推进器的推力系数,d为无轴轮缘推进器直径,α1和α2分别为减摇鳍鳍角最小和最大值,n1和n2分别为无轴轮缘推进器转速的最小值和最大值;
17、通过上述分配方程最终得到减摇鳍的鳍角α和无轴轮缘推进装置的转速n,由此分配的鳍角和转速可以使装置的能耗最低。
18、本发明的有益效果在于:
19、本发明提供的一种智能船舶主动减摇装置,在减摇鳍靠近鳍根部安装无轴轮缘推进装置产生推力,减少船舶摇动。该装置可根据dgps的船舶速度信息和船舶姿态传感器的横摇信息实时调整减摇鳍的鳍角和无轴轮缘推进装置的转速达到良好的减摇效果。
20、本发明提供的一种智能船舶主动减摇控制方法,可根据不同的航速采用不同的减摇策略。当船速低于一定值时,利用无轴轮缘推进装置产生推力,抵抗船舶横摇运动;当船速高于一定值时,依靠减摇鳍产生升力,抵抗船舶横摇运动;当船速介于两者之间时,采用sqp(序列二次规划)分配算法,分配鳍角和转速,使得本装置在减摇效果最好的同时,耗能最低
21、本发明提供的一种智能船舶主动减摇装置及其控制方法,适用性广,克服了传统的减摇鳍装置在低航速时减摇效果差,零航速减摇鳍易磨损,噪声大等缺陷,可以根据航速的不同采用不同的减摇策略,减摇效果好,能耗低。
技术特征:
1.一种智能航行船舶主动减摇装置,其特征在于:包括船舶姿态传感器、dgps系统、船舶减摇控制箱、减摇鳍、转鳍装置、无轴轮缘推进装置、无轴轮缘推进器控制系统、减摇鳍控制系统,减摇鳍靠近鳍根部安装无轴轮缘推进装置,船舶减摇控制箱通过船舶减摇控制箱io单元和通讯线缆分别连减摇鳍控制系统和无轴轮缘推进器控制系统;船舶减摇控制箱还通过船舶减摇控制箱通讯单元和通讯线缆分别连接船舶姿态传感器和dgps系统;其中,船舶姿态传感器,用于实时监测船舶的横摇角度φ和角速度p以及角加速度q,并将得到的船舶的横摇角度φ和角速度p以及角加速度q信息传递给船舶减摇控制箱通讯单元;dgps系统,用于实时得到船舶的运动速度v,并将船舶运动的速度v通过通讯线缆传输至船舶减摇控制箱通讯单元,船舶减摇控制箱接收到船舶的横摇角度φ和角速度p以及角加速度q、航速v后,通过分配算法计算减摇鳍的鳍角α和无轴轮缘推进装置的转速n后,发送鳍角和转速信息至船舶减摇控制箱io单元,船舶减摇控制箱io单元将信号分别发送到减摇鳍控制系统和无轴轮缘推进器控制系统,减摇鳍控制系统和无轴轮缘推进器控制系统将鳍角α和转速n信息分别发送到转鳍装置和无轴轮缘推进器,转鳍装置和无轴轮缘推进装置控制鳍角和转速产生抵抗力矩减小船舶的横摇运动。
2.根据权利要求1所述的智能航行船舶主动减摇装置,其特征在于:减摇鳍控制系统和无轴轮缘推进器控制系统将鳍角α和转速n通过通讯线缆反馈至船舶减摇控制箱io单元,船舶减摇控制箱将根据反馈的鳍角和转速信息和船舶横摇信息以及船速计算下一时刻的鳍角α和转速n,减摇鳍控制系统收到的鳍角信息后将其传递给转鳍装置使减摇鳍转动一定鳍角;轮缘推进器控制系统到的转速信息后,将其传递给控无轴轮缘推进装置。
3.根据权利要求1所述的智能航行船舶主动减摇装置,其特征在于:dgps系统中的dgps接收机通过避雷器连接卫星天线,由卫星天线将船舶速度信息传递给dgps接收机,dgps接收机将船舶速度v信息传递给船舶减摇装置控制箱通讯单元。
4.一种智能船舶主动减摇控制方法,采用智能航行船舶主动减摇装置,其特征在于,该方法包括:
技术总结
本发明涉及一种智能航行船舶主动减摇装置及控制方法,在减摇鳍靠近鳍根部安装无轴轮缘推进装置,根据船舶姿态传感器采集的横摇角度、角速度信息和角加速度信息和通过DGPS系统得到的船舶的航速信息,通过控制减摇鳍的鳍角和无轴轮缘推进装置的转速产生抵抗力矩减小船舶的横摇运动。本发明可以根据航速采取不同的控制方法。当船速低于一定值时,减摇鳍升力低,利用无轴轮缘推进器产生推力减小船舶横摇;当船速高于一定值时,减摇鳍升力足够高,利用减摇鳍产生抵抗横摇的抵抗力;当船速介于两者之间时,减摇鳍和无轴轮缘推进器共同产生抵抗力达到减摇作用,实现了零到全航速下的良好的减摇效果,适用性广,消耗能量低,不易磨损,耐用性强。
技术研发人员:杨静宇,温致洋,杨祯,刘彬,陈忠言
受保护的技术使用者:中国船舶集团有限公司第七〇四研究所
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!