一种水下机器人的稳性调节装置及方法与流程
本发明属于水下机器人稳性调节领域,具体涉及一种水下机器人的稳性调节装置及方法,主要应用在对水面作业的水下机器人的稳性提升方面。
背景技术:
1、水下机器人稳性调节装置主要是用来解决水下机器人水面作业过程中受风浪、水流等影响导致横滚角过大,影响作业精度等问题。
2、随着海洋经济的振兴和海洋工程产业的稳定发展,采用水下机器人进行水面作业的需求越来越多,受水下机器人体量等的影响,其自身的稳心高仅能满足水下稳定航行的需求,在水面作业时会出现摇摆幅度较大,无法开展精确作业等问题。
3、目前常规的稳性调节装置为垂直向下释放重块锚的方式,重块锚与水下机器人之间通过钢丝绳软连接,现有装置一般通过收放绞车带动钢丝绳来实现重块锚的释放和回收,具有以下几个方面的技术问题:
4、1、重块锚与水下机器人分离方式,整个装置结构过于分散,占用空间大,钢丝软绳在收放过程中容易出现排列不整齐,相互压死,导致无法释放等问题,整体装置无法直接对水下机器人的重心高度、初稳性高以及回复力矩进行调节,无法快速高效地提高水下机器人稳性。
5、2、传统装置易受到海面以及水下水流等影响,与水下机器人外形匹配度低,增加水下机器人运动阻力,影响水下机器人稳性调节速度和效率。
6、3、释放重块锚进行稳性调节的方式仅适用于水下机器人水面漂浮作业的工况,在水下时,由于受到钢丝软绳漂浮和渔网等海下障碍物的影响,无法满足水下机器人在水下或水面运动过程中对其稳性的快速调节要求。
技术实现思路
1、有鉴于此,本发明提供了一种水下机器人的稳性调节装置及方法,提高了稳性调节装置与水下机器人的整体匹配度,进一步解决了水下机器人从水下至水面全方位作业场景下的稳性调节问题。
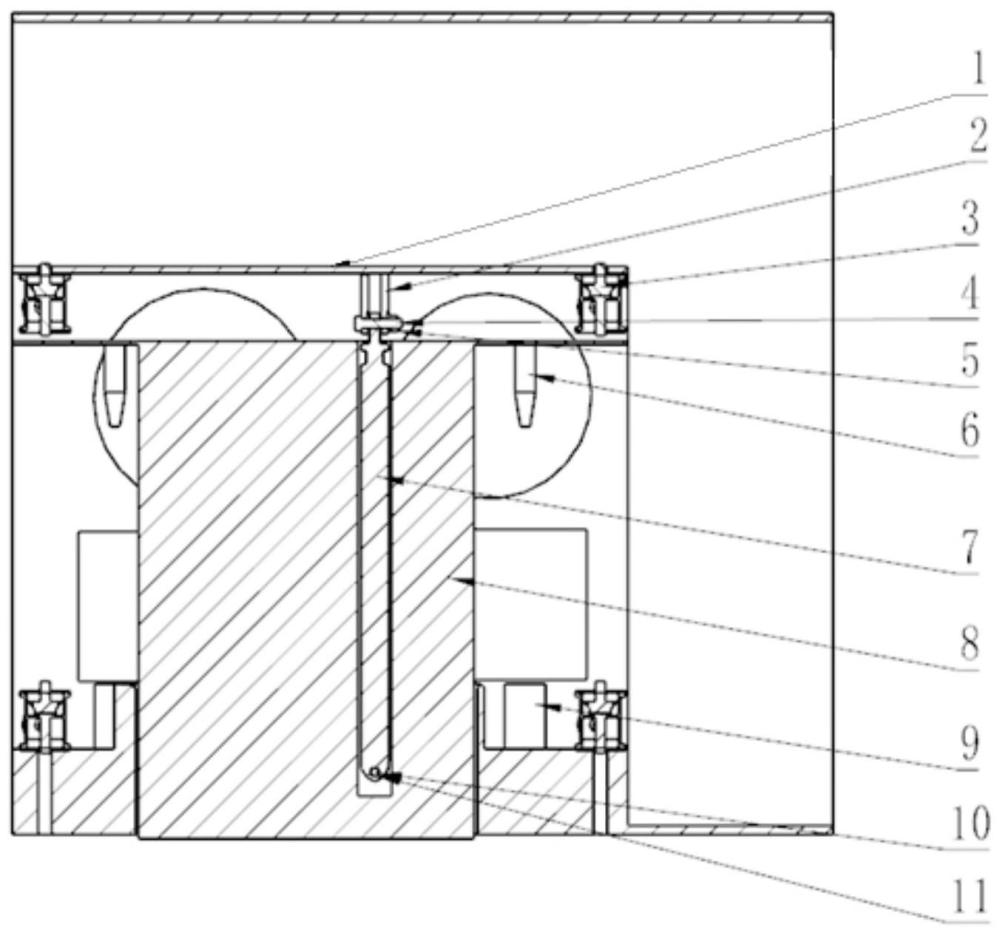
2、该水下机器人的稳性调节装置包括安装架以及设置在安装架内的行程检测装置、驱动单元、调节压载和导向装置;
3、所述驱动单元、行程检测装置、调节压载和导向装置设在安装架内;
4、所述驱动单元用于驱动调节压载竖向移动,以调节重心位置。
5、在上述方案基础上,进一步的,所述驱动单元包括液压缸,其竖直嵌入调节压载顶部开设的凹槽内;所述液压缸的固定端与所述安装架固接,伸缩端与调节压载连接。
6、在上述方案基础上,进一步的,所述液压缸的固定端通过销轴a和螺母a与安装架连接;
7、所述液压缸的伸缩端通过销轴b和螺母b与调节压载连接。
8、在上述方案基础上,进一步的,所述调节压载包括壳体、顶板和配重块;
9、所述壳体为顶部开口底部封闭的流线型立体空心结构;在壳体顶部开口处设有顶板;
10、若干个所述配重块容置于壳体内部,改变调节压载的重量和重心位置。
11、在上述方案基础上,进一步的,所述导向装置包括导向定位槽和导向定位销,导向定位槽安装在安装架内侧底部;
12、所述顶板两侧设置导向定位销,导向定位销的销头方向竖直朝下;
13、所述导向定位销与导向定位槽竖直对应;在所述液压缸伸缩作用下导向定位销向下运动至导向定位槽内,形成锁定配合;
14、所述导向定位销与导向定位槽采用锥面导向方式。
15、在上述方案基础上,进一步的,所述行程检测装置包括:行程检测盖、行程检测壳体、水密连接器和传感器;所述传感器容置于行程检测壳体和行程检测盖形成的空腔内,空腔侧壁上对接水密连接器,水密连接器上具有通孔,通过连线连接传感器与机器人控制系统。
16、在上述方案基础上,进一步的,所述安装架与调节压载采用低磁不锈钢材料。
17、此外,基于上述水下机器人的稳性调节装置,本发明还提供一种水下机器人的稳性调节方法:
18、步骤一,水下机器人下水作业前,根据工作需求,配置所述调节压载的配重块,通过调节配重块的数量,满足水下机器人作业时稳性调节的需要;
19、步骤二,水下机器人航行至作业区域后,进行水面作业过程中,当需要调节水下机器人的重心时:所述液压缸将调节压载伸出安装架,行程检测装置将检测到的行程信息反馈至水下机器人控制系统,实时分析水下机器人当前状态下的稳性;
20、步骤三,行程检测装置检测调节压载伸出到位后,驱动单元停止工作并锁紧;
21、步骤四,水面作业结束后,液压缸重新开始工作,调节压载被收回安装架,当行程检测装置检测到调节压载被完全回收时,液压缸停止工作,水下机器人下潜至水下并航渡至回收点。
22、有益效果:
23、1.调节压载内置在安装架内部,与安装架形成一个整体,通过液压缸的伸缩作用,调节压载从安装架底部开口处伸出,调节装置整体重心高度,增加初稳性高和恢复力矩,提高水下机器人的稳性。
24、2.该装置中的销轴与螺母使液压缸和调节压载可从安装架拆卸下来,通过不同行程液压缸和不同配重的调节压载,使该装置适应不同作业环境要求,扩大装置应用范围。
25、3.液压缸两端均采用销轴连接方式,确保液压缸不承受径向力,大大提高液压缸使用寿命。
26、4.该装置的安装架与调节压载采用低磁不锈钢材料,具有极强的防腐蚀性能,可在海水等恶劣环境中长期稳定工作。
27、5.在调节压载两侧和安装架底部两侧相对设置的行程检测装置,提高调节压载释放和回收的可靠性。
28、6.导向定位销和导向定位槽采用锥面导向的方式,提高了导向适应性,并在液压缸轴向力的作用下实现调节压载的固定,结构简单可靠。
技术特征:
1.一种水下机器人的稳性调节装置,其特征在于,包括安装架(1)以及设置在安装架(1)内的行程检测装置(3)、驱动单元、调节压载(8)和导向装置;
2.如权利要求1所述的一种水下机器人的稳性调节装置,其特征在于,
3.如权利要求2所述的一种水下机器人的稳性调节装置,其特征在于,所述液压缸(7)的固定端通过销轴a(4)和螺母a(5)与安装架(1)连接;
4.如权利要求1所述的一种水下机器人的稳性调节装置,其特征在于,所述调节压载(8)包括壳体、顶板(17)和配重块(16);
5.如权利要求4所述的一种水下机器人的稳性调节装置,其特征在于,所述导向装置包括导向定位槽(9)和导向定位销(6),导向定位槽(9)安装在安装架(1)内侧底部;
6.如权利要求1-5任一项所述的一种水下机器人的稳性调节装置,其特征在于,所述行程检测装置(3)包括:行程检测盖(12)、行程检测壳体(13)、水密连接器(14)和传感器(15);所述传感器(15)容置于行程检测壳体(13)和行程检测盖(12)形成的空腔内,空腔侧壁上对接水密连接器(14),水密连接器上具有通孔,通过连线连接传感器(15)与机器人控制系统。
7.如权利要求1-5中任一项所述的一种水下机器人的稳性调节装置,其特征在于,所述安装架(1)与调节压载(8)采用低磁不锈钢材料。
8.一种水下机器人的稳性调节方法,其特征在于,采用权利要求1-7任一项所述的一种水下机器人的稳性调节装置,包括以下步骤:
技术总结
本发明属于水下机器人稳性调节领域,具体涉及一种水下机器人的稳性调节装置及方法,主要应用在对水面作业的水下机器人的稳性提升方面。该水下机器人的稳性调节装置包括安装架以及设置在安装架内的行程检测装置、驱动单元、调节压载和导向装置;驱动单元用于驱动调节压载竖向移动,以调节重心位置。行程检测装置用于检测调节压载在安装架内的行程;导向装置用于对调节压载进行导向和固定。调节压载内置在安装架内部,与安装架形成一个整体,通过液压缸的伸缩作用,调节压载从安装架底部开口处伸出,调节装置整体重心高度,增加初稳性高和恢复力矩,提高水下机器人的稳性。
技术研发人员:汪向前,牛群峰,李雨田,王光越,朱泽珲
受保护的技术使用者:宜昌测试技术研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!