一种无人通用型清道夫仿生鱼潜水器系统
本技术涉及潜水器,具体领域为一种无人通用型清道夫仿生鱼潜水器系统。
背景技术:
1、当今社会越来越发达,但是也有许多人力所不能及的地方,像在发生沉船、飞机坠海等安全事故,或者水下地形勘察、鱼情分析、下水船只检测和维修等情形,这样就需要潜水器来完成一些工作。对于救援所用的机器设备也是多种多样,有在地震过后的搜救机器人、也有在火灾起火点的勘查机器人,那么在水中营救的救援机器人或潜水器在水下的救捞领域就起到了举足轻重的作用。
2、潜水器是工作于水下的极限作业机器人,能潜入水中代替人完成某些操作。潜水器主要运用在海上搜救,水下环境恶劣危险,人的潜水深度有限,所以潜水器已成为开发海洋的重要工具。此外,潜水器在石油开发、地貌勘察、科研、水产养殖、水下船体检修清洁、潜水娱乐、城市管道检测等领域的作用开始显现出来,市场也正在兴起。
3、现有技术的缺点
4、1、在潜水器出现之前对于水下搜索和救捞领域,只有船只、舰艇与潜水员的结合模式,但是针对高流速、大深度、视距短的位置,水下营救往往困难重重。
5、2、目前潜水器在石油开发、地貌勘察、科研、水产养殖、水下科普、水下船体检修清洁、潜水娱乐、城市管道检测等领域的作用开始显现出来,市场也正在兴起。但是有以下几个共同的特点:体形大、专业性强、造价较高、通信困难,具体如下:
6、⑴体形大。目前市面上出现的各型潜水器不论哪种用途,其体形均比较大,长度大于500mm、宽度大于100mm、高度大于50mm,或者直径大于150mm;净重大于10kg;需要专用载具进行包装及运输。
7、⑵专业性强。不论哪种潜水器,其操作使用均需要一定的专业水平,比如带摄像功能的话就需要专业的显示器;带有机械臂的话就需要专业编程软件;甚至操控都需要通过电脑或者大型的控制器。
8、⑶造价较高。由于是有源机电一体化产品,一个续航能力超过30分钟的潜水器,仅一块直流电源的售价就在几百元以上;如果再带有几个电机,加之控制等功能,一台基本功能的潜水器其整套系统的售价往往上万元;如果再配上相关的机械臂,那造价就更高了。
9、⑷通信困难。电磁波在各种介质中的传播速度可由v=c/n来计算,其中c是真空中的光速,n是介质的折射率,空气中的电介质常数和磁导率都近视于真空μ=μ0,ε=ε0是相对最小的,因此速度是最大的,电磁波在空气中的传播速度为340m/s,电磁波在水中有着不同于空气中的传播特性。海水对电磁波能量的吸收作用很强,但对于不同波长的电磁波又有所不同。波长越短、频率越高,在海水中的衰减就越厉害。因此短波在水中的衰减是很快的,几乎无法穿过海水传播,而波长更长的长波、甚长波、超长波在海水中的衰减程度就要小得多,能够进入几十米至几百米的水中,各种无线通信的收发信机往往体积较大,造价较高,民用很难接受,普及性低。
10、⑸普及性差、民用性低。上述特点造成的结果就是非专业机构和专业人员无法采购与使用,大大限制了潜水器的普及推广与技术创新。地球上海洋总面积约为3.6亿平方公里,约占地球表面积的71%,平均水深约3795米。水下环境恶劣危险,人的潜水深度有限,所以潜水器已成为海洋深度开发的重要工具;此外,中国陆地上江河湖泊众多,繁忙的航道和养殖业对潜水器的需求开始逐年增长,民生对于潜水器的需要正如对大疆无人机的需求一样蓬勃(尽管大疆无人机也有大中型的,但其销量最高的是小型无人机,原因之一就是对专业的要求不高、体积小、易操控、售价低)。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供一种无人通用型清道夫仿生鱼潜水器系统。
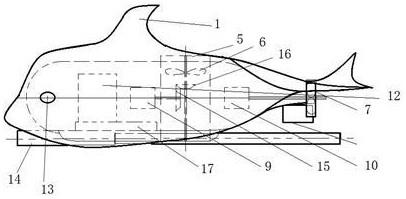
2、为实现上述目的,本实用新型提供如下技术方案:一种无人通用型清道夫仿生鱼潜水器系统,包括仿生鱼体潜水器、通信线缆、显示终端和遥控器,所述仿生鱼体潜水器其中部上下贯穿设置有通孔,所述通孔内转动设置螺旋桨一,所述仿生鱼体潜水器的尾部左右两侧对称分别转动设置有螺旋桨二和螺旋桨三,
3、所述仿生鱼体潜水器内部分别设置有电机一、电机二和电机三,电机一的转轴通过齿轮与螺旋桨一联动,电机二的转轴与螺旋桨二连接,电机三的转轴与螺旋桨三连接,
4、所述仿生鱼体潜水器的顶部设置有与通信线缆连接的防水接口,
5、所述仿生鱼体潜水器的内部设置有控制器,控制器的数据端与防水接口连接,控制器的输出端分别与电机一、电机二和电机三的控制端连接,
6、所述仿生鱼体潜水器的前端分别设置有led灯和水下探头,led灯和水下探头分别与控制器连接,
7、所述显示终端和遥控器分别通过通信线缆与控制器电连接,且通信线缆与外部电源连接。
8、在其中一些实施例中,所述led灯在仿生鱼体潜水器的前端呈对称设置有两个。
9、在其中一些实施例中,所述水下探头设置在仿生鱼体潜水器的前端位于led灯的下方。
10、在其中一些实施例中,所述仿生鱼体潜水器的外形设置为清道夫鱼体结构。
11、在其中一些实施例中,所述电机一的转轴位于通孔内的一端上设置有锥齿轮一,螺旋桨一的转轴上设置有与锥齿轮一配合的锥齿轮二。
12、在其中一些实施例中,所述仿生鱼体潜水器内设置有蓄电池,所述蓄电池对控制器供电,通过控制器对三个电机进行电源输出控制。
13、与现有技术相比,本实用新型的有益效果是:
14、⑴外形结构设计。就外形看,目前大部分潜水器是框架式或类似于潜艇的回转细长体,随着仿生技术的不断发展,仿鱼类形态甚至是运动方式的潜水器将会不断发展。本专利产品主体结构考虑清道夫鱼形的回转细长体。
15、⑵动力与运动设计。为了保证仿生机器鱼能够实现直线前进与后退运动、左右转弯、快速上浮和下潜等各种游姿。本专利产品计划采用三台电机作为动力。其中两台安装在尾部,通过电机的正反转实现鱼的前进与后退、左右转弯运动;另一台电机安装在鱼的中部重心处,并从中设置通道,通过电机的正反转实现鱼的上浮和下潜运动,本部分采用密封防水设计。
16、⑶控制部分设计。本专利产品计划通过遥控的方式实现对三台电机的控制,控制部分采用密封防水设计。
17、⑷通讯单元设计。本产品的通信分为控制通信与可视信息通信两部分。控制通信主要通过无线微波通信进行;水下可视信息通信主要用于水下图形图像的反馈,采用刚性有线电缆拖曳的方式进行通讯,本部分采用密封防水设计。
18、⑸救援与互动部分设计。本仿生鱼在头部设计有磁力吸盘、挂钩、反向镜等附件。对于重量较轻和体积较小的物件可以在发现后直接获取。头部的连接与整体鱼的结构骨架是整体,不影响鱼的强度。
19、⑹照明单元设计。在摄像头周围设计有6个led灯,并可调节亮度,本部分采用密封防水设计。
20、⑺材料设计。除了电气和动力部分外,其余材料采用abs或ps塑料,以减轻重量,节约能源。
21、本技术的一个或多个实施例的细节在以下附图和描述中提出,以使本技术的其他特征、目的和优点更加简明易懂,通过本技术的实施例对本技术进行详尽说明和了解。
- 还没有人留言评论。精彩留言会获得点赞!