一种水下清洁机器人的制作方法
本技术涉及清洁机器人的,尤其涉及一种水下清洁机器人。
背景技术:
1、随着人们对海洋的开发、使用,海洋生态环境也受到一定程度的影响。特别是对于沿岸、港口等一些海洋区域,经常在海面上看到漂浮的垃圾,人们需要对这些垃圾进行打捞。而有些海洋垃圾则沉入到水下或海底,漂浮在水面上的船只或清理设备难以对海底垃圾进行打捞,需要使用到能潜入到水下或海底的设备进行清理。
2、现有传统的水下清洁机器人多数为履带式,需要触地进行作业,而针对水中漂浮,可处于不同深度进行作业的机器人则较少,且多数难以灵活控制清洁机器人在水中的移动操作,包括前进后退上浮下沉等。
技术实现思路
1、本实用新型的目的在于:为了解决传统水下清洁机器人的上述问题,而提出可水下灵活移动的一种水下清洁机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种水下清洁机器人,包括本体外壳、置于本体外壳内部的推进机构和调节机构、置于本体外壳底部的清洁机构;
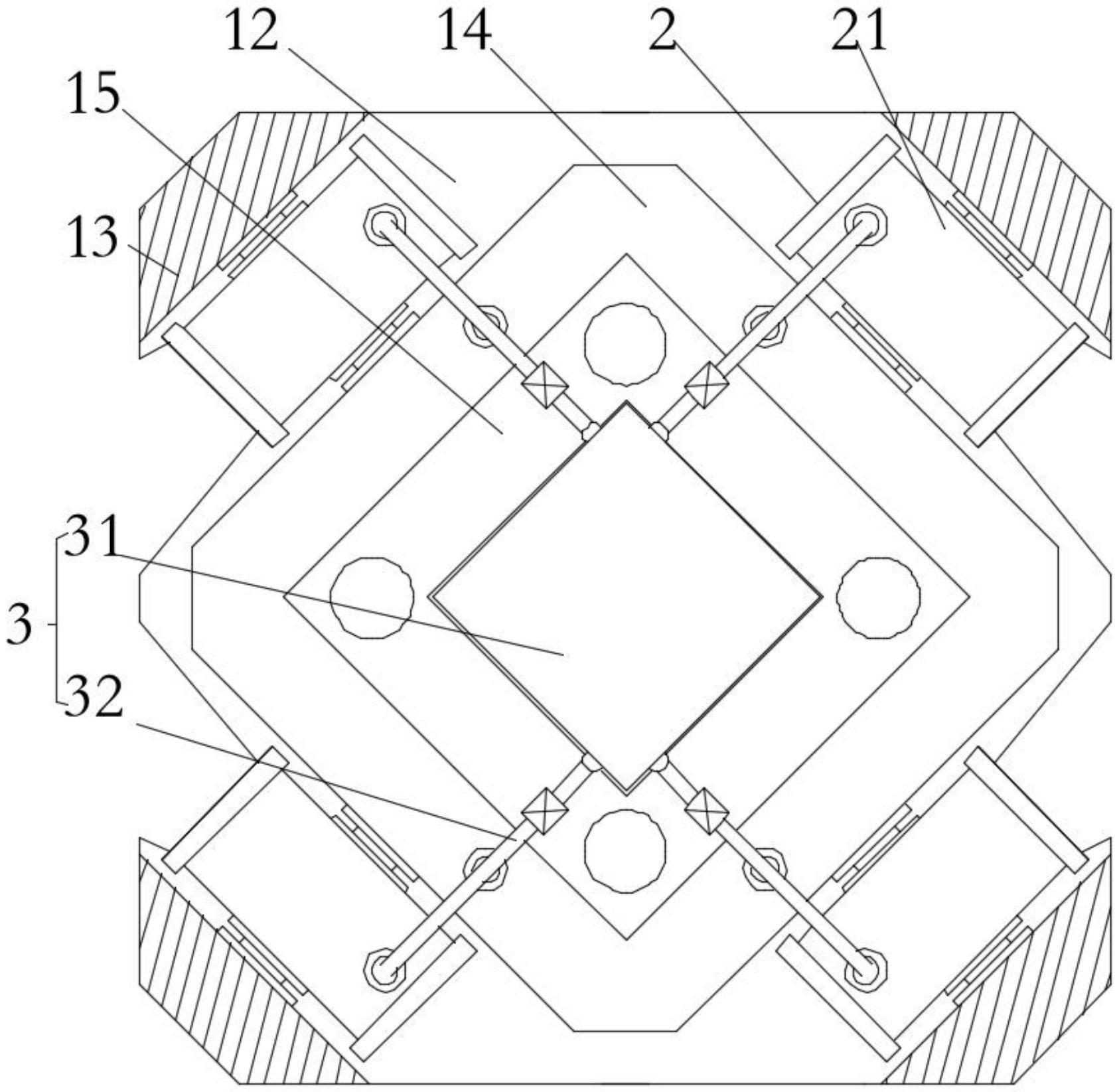
4、所述本体外壳包括顶板、底板、固定设于顶板和底板之间的连接板、方形外壳以及方形内壳,所述推进机构包括推进筒、设于推进筒内腔中的转轮,所述调节机构包括固定设于方形内壳顶部的液压机构、输出端分别与推进筒和方形外壳连接的液管,所述清洁机构包括固定设于底板底端的固定板、转动设于固定板底部两侧的滚刷、以及置于滚刷底部的收纳盒。
5、作为上述技术方案的进一步描述:所述推进筒的外侧面两端均通过转轴与连接板和方形外壳之间,推进筒的内腔一侧固定设有限位柱,限位柱内部设有隔板,且限位柱的两端均与对应侧液管的输出端连接,所述液管通过支管与方形内壳的内腔连通,液管的输入端与液压机构的输出端连接,所述转轮的输入端与电机的输出端转动连接,电机固定设于推进筒内腔中。
6、作为上述技术方案的进一步描述:所述方形外壳和方形内壳之间形成液压腔,所述方形内壳和顶板的顶端同一位置均开有通孔,方形内壳的内腔中设有推板,推板通过顶端固定设有的滑杆与方形内壳和顶板滑动连接,推板的侧面与内腔壁之间固定设有囊袋,且方形内壳与底板的底端中部均开有气孔与外部的气管连通。
7、作为上述技术方案的进一步描述:所述滚刷的输入端均通过皮带轮,与设于固定板上的电机的输出端转动连接,所述收纳盒为前后贯通两侧封闭结构。
8、作为上述技术方案的进一步描述:所述底板的底端边角位置处固定设有探照灯和摄像仪。
9、综上,由于采用了上述技术方案,本实用新型的有益效果是:
10、1.通过四个朝向不同的推进机构,电机控制不同位置处转轮的转速、转向等,可实现装置整体在水中的前进后退转圈等操作,而调节机构则是通过液压机构将方形外壳与方形内壳间的液体泵入液管中,同一推进筒上下两侧的液压不同则会导致推进筒的转动,从而可实现装置整体上浮和下沉的推进工作。
11、2.外部的供气设备通过气管控制推板的移动,即方形内壳的内腔中吸入或排出液体,以实现装置整体的快速上浮下沉,进而清洁机构可通过转动的滚刷将水中的垃圾等卷入收纳盒中,实现清洁功能,整体结构较为简单,操作灵活。
技术特征:
1.一种水下清洁机器人,其特征在于,包括本体外壳(1)、置于本体外壳(1)内部的推进机构(2)和调节机构(3)、置于本体外壳(1)底部的清洁机构(4);
2.根据权利要求1所述的一种水下清洁机器人,其特征在于,所述推进筒(21)的外侧面两端均通过转轴与连接板(13)和方形外壳(14)之间,推进筒(21)的内腔一侧固定设有限位柱,限位柱内部设有隔板,且限位柱的两端均与对应侧液管(32)的输出端连接,所述液管(32)通过支管与方形内壳(15)的内腔连通,液管(32)的输入端与液压机构(31)的输出端连接,所述转轮(22)的输入端与电机的输出端转动连接,电机固定设于推进筒(21)内腔中。
3.根据权利要求1所述的一种水下清洁机器人,其特征在于,所述方形外壳(14)和方形内壳(15)之间形成液压腔,所述方形内壳(15)和顶板(11)的顶端同一位置均开有通孔,方形内壳(15)的内腔中设有推板(151),推板(151)通过顶端固定设有的滑杆与方形内壳(15)和顶板(11)滑动连接,推板(151)的侧面与内腔壁之间固定设有囊袋(152),且方形内壳(15)与底板(12)的底端中部均开有气孔与外部的气管(5)连通。
4.根据权利要求1所述的一种水下清洁机器人,其特征在于,所述滚刷(41)的输入端均通过皮带轮,与设于固定板上的电机的输出端转动连接,所述收纳盒(42)为前后贯通两侧封闭结构。
5.根据权利要求1所述的一种水下清洁机器人,其特征在于,所述底板(12)的底端边角位置处固定设有探照灯和摄像仪。
技术总结
本技术公开了一种水下清洁机器人,包括本体外壳、置于本体外壳内部的推进机构和调节机构、置于本体外壳底部的清洁机构;本技术,通过四个朝向不同的推进机构,电机控制不同位置处转轮的转速、转向等,实现装置整体在水中的前进后退转圈等操作,调节机构则是通过液压机构将方形外壳与方形内壳间的液体泵入液管中,同一推进筒上下两侧的液压不同则会导致推进筒的转动,从而可实现装置整体上浮和下沉的推进工作,其中外部的供气设备也可通过气管控制推板的移动,即方形内壳的内腔中吸入或排出液体,以实现装置整体的快速上浮下沉,清洁机构可通过转动的滚刷将水中的垃圾等卷入收纳盒中,实现清洁功能,整体结构较为简单,操作灵活。
技术研发人员:廖润丰,崔冰冰,刘茜,李冰洁,李祖颖,李卓学,郭腾
受保护的技术使用者:廖润丰
技术研发日:20230422
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!