一种无人帆船与其他船舶的模块化无轴推进系统及船舶的制作方法
本申请属于船舶推进,具体涉及一种无人帆船与其他船舶的模块化无轴推进系统。
背景技术:
1、船舶推进系统的主要功能是通过螺旋桨转动产生的推力驱动船舶前进或后退。现有的船舶推进系统多以传动轴与螺旋桨结合方式为主,此种推进方式可以通过调节螺旋桨桨距,实现不同速度下的推进效率最大化。但是,在使用传动轴与螺旋桨结合的船舶推进系统的过程中,水中的异物(如缆绳、渔网、水草、海带等)很容易缠绕在船舶推进系统的螺旋桨上,导致船舶停机失去动力,引发事故。
2、为解决异物缠绕螺旋桨的问题,近年来业界有人提出了无轴泵推系统,桨叶安装在旋转内筒上,无轴泵推系统技术利用磁力耦合器将驱动端和泵端隔离开,使得泵端部件无须通过轴来连接驱动端部件,也避免了轴密封处可能导致的泄漏问题。但是,由于无轴泵推系统的桨叶安装在旋转内筒上,不易安装桨距调节装置,如果在无轴泵推系统再安装桨距调节装置,则只能将桨叶调节装置与桨叶一一对应安装在旋转内筒的外侧,会导致推进系统自重增加,进而导致推进效率降低,通过桨距调节带来的效率增加小于因推进系统自重增加导致的效率降低,在经济上不具备可行性。
技术实现思路
1、基于此,本申请提供一种无人帆船与其他船舶的模块化无轴推进系统及船舶,以解决现有无轴泵推系统通过安装桨距调节装置来实现桨距可调导致综合效率较低、在经济上不具备可行性的问题。
2、根据本申请的第一方面,提供了一种无人帆船与其他船舶的模块化无轴推进系统,所述无轴推进系统包括:壳体、候选桨叶模块、设置在所述壳体内的船桨装置,以及设置在所述壳体顶部且用于驱动所述船桨装置的驱动电机模块;
3、所述船桨装置包括转筒模块和可拆卸安装在所述转筒模块内侧的目标桨叶模块,以及可拆卸安装在所述转筒模块外侧的齿轮模块,所述转筒模块通过连接模块与所述壳体可拆卸连接;
4、所述候选桨叶模块可拆卸安装在所述转筒模块内侧,所述候选桨叶模块用于替换所述目标桨叶模块,且所述候选桨叶模块的桨距与所述目标桨叶模块仅桨距不同。
5、上述方案中,进一步可选地,所述目标桨叶模块包括第一安装环和多个第一桨叶;
6、多个所述第一桨叶沿所述第一安装环的圆周方向均匀布设在所述第一安装环的内侧面,所述第一安装环的外侧面沿其圆周方向均匀开设有多个第一安装槽;
7、所述转筒模块的内壁相应分布有与所述多个第一安装槽一一对应的限位凸条。
8、上述方案中,进一步可选地,所述候选桨叶模块包括第二安装环和多个第二桨叶;
9、多个所述第二桨叶沿所述第二安装环的圆周方向均匀布设在所述第二安装环的内侧面,所述第二安装环的外侧面沿其圆周方向均匀开设有多个第二安装槽;
10、所述第二安装环与所述第一安装环结构相同,所述第二桨叶与所述第一桨叶结构不同。
11、上述方案中,进一步可选地,所述转筒模块包括筒体、多个内壁加强筋和多个外壁加强筋;
12、多个所述内壁加强筋沿所述筒体的圆周方向均匀布设在所述筒体的内侧面,且多个所述内壁加强筋的数量与多个所述第一安装槽的数量相等且一一对应,所述内壁加强筋与其对应的所述第一安装槽卡接配合;
13、多个所述外壁加强筋沿所述筒体的圆周方向均匀布设在所述筒体的外侧面。
14、上述方案中,进一步可选地,所述齿轮模块套设在所述筒体的外侧中部,且所述齿轮模块与所述筒体呈同轴布设;
15、所述齿轮模块的内侧面沿其圆周方向均匀开设有多个第三安装槽,多个所述第三安装槽的数量与多个所述外壁加强筋的数量相等且一一对应,所述第三安装槽与其对应的所述外壁加强筋卡接配合。
16、上述方案中,进一步可选地,所述连接模块包括两个连接筒,两个所述连接筒分别套设在所述筒体的外侧两端,且所述连接筒的内侧面与所述筒体的外侧面相贴合;
17、所述连接筒的外侧面与所述壳体的内侧面相贴合。
18、上述方案中,进一步可选地,所述驱动电机模块包括驱动电机和套设在所述驱动电机的输出轴上的驱动齿轮;
19、所述驱动齿轮与所述齿轮模块啮合,所述驱动电机通过所述驱动齿轮驱动所述齿轮模块、所述转筒模块和所述目标桨叶模块同步旋转。
20、上述方案中,进一步可选地,所述无轴推进系统还包括安装模块,所述安装模块用于将所述驱动电机模块可拆卸安装在船尾板上。
21、上述方案中,进一步可选地,所述连接模块和所述齿轮模块的强度均大于所述转筒模块的强度,所述转筒模块的强度大于所述目标桨叶模块的强度。
22、根据本申请的第二方面,提供了一种船舶,所述船舶包括船体以及如第一方面任一项所述的无人帆船与其他船舶的模块化无轴推进系统。
23、在本申请的实施例中,船舶无轴推进系统包括壳体、候选桨叶模块、船桨装置和驱动电机模块,船桨装置包括可拆卸连接的转筒模块、目标桨叶模块和齿轮模块,且船桨装置通过连接模块与壳体可拆卸连接,目标桨叶模块能够与候选桨叶模块进行替换,便于用户根据不同航速需求的应用场景更换安装与之匹配的效率最优的桨叶模块,进而提升该无人帆船与其他船舶的模块化无轴推进系统的推进效率;且无人帆船与其他船舶的模块化无轴推进系统的模块化设计使得目标桨叶模块因异物撞击损坏时,可以快速便捷的对其进行更换维修,有效提高了船只出勤率,便于推广使用。
技术特征:
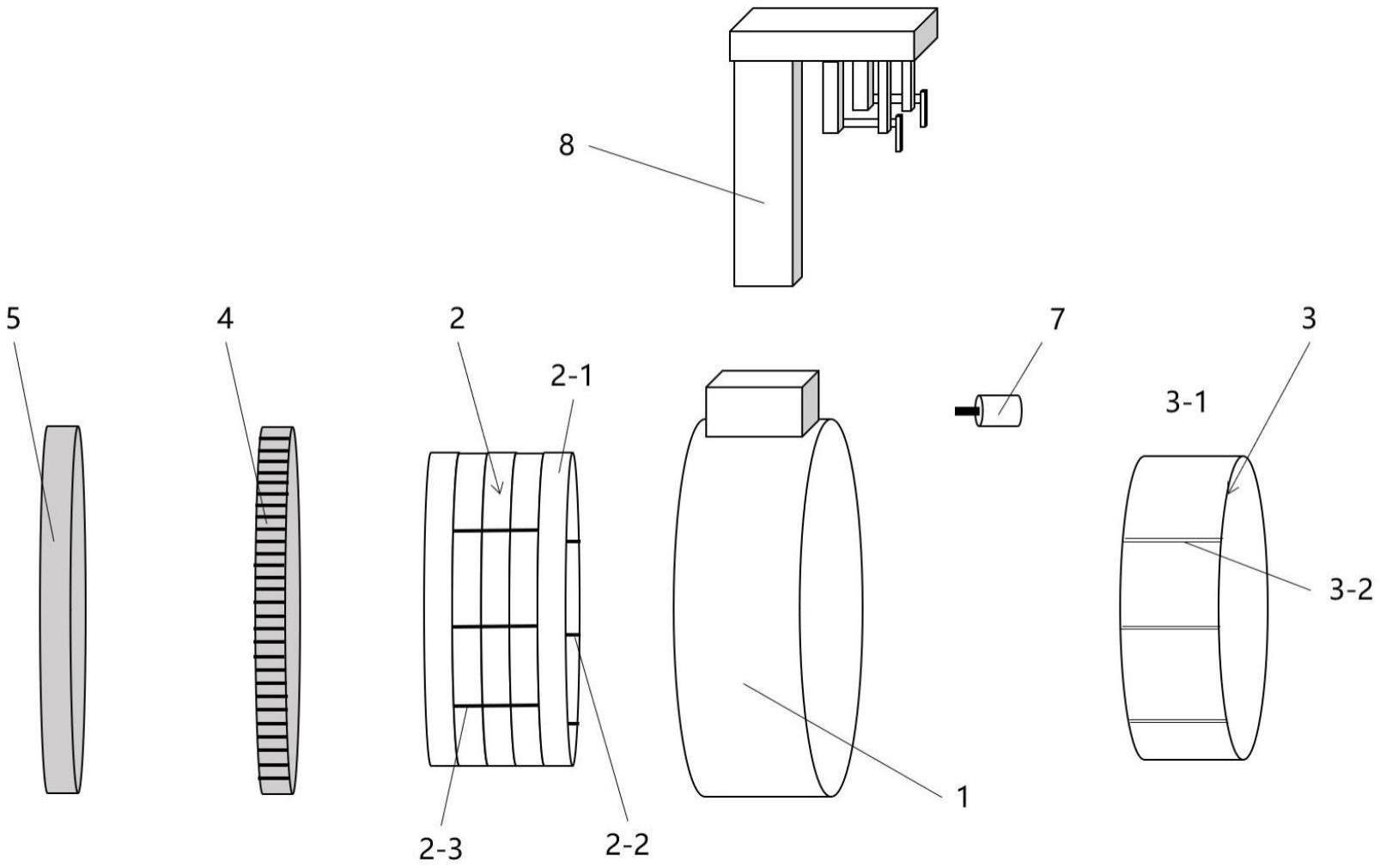
1.一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述无人帆船与其他船舶的模块化无轴推进系统包括:壳体(1)、候选桨叶模块(6)、设置在所述壳体(1)内的船桨装置,以及设置在所述壳体(1)顶部且用于驱动所述船桨装置的驱动电机模块;
2.根据权利要求1所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述目标桨叶模块(3)包括第一安装环(3-1)和多个第一桨叶(3-3);
3.根据权利要求2所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述候选桨叶模块(6)包括第二安装环(6-1)和多个第二桨叶(6-3);
4.根据权利要求2所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述转筒模块(2)包括筒体(2-1)、多个内壁加强筋(2-2)和多个外壁加强筋(2-3);
5.根据权利要求4所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述齿轮模块(4)套设在所述筒体(2-1)的外侧中部,且所述齿轮模块(4)与所述筒体(2-1)呈同轴布设;
6.根据权利要求4所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述连接模块包括两个连接筒(5),两个所述连接筒(5)分别套设在所述筒体(2-1)的外侧两端,且所述连接筒(5)的内侧面与所述筒体(2-1)的外侧面相贴合;
7.根据权利要求1所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述驱动电机模块包括驱动电机(7)和套设在所述驱动电机(7)的输出轴上的驱动齿轮;
8.根据权利要求1所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述无轴推进系统还包括安装模块(8),所述安装模块(8)用于将所述驱动电机模块可拆卸安装在船尾板上。
9.根据权利要求1所述的一种无人帆船与其他船舶的模块化无轴推进系统,其特征在于,所述齿轮模块(4)和所述连接模块的强度均大于所述转筒模块(2)的强度,所述转筒模块(2)的强度大于所述目标桨叶模块(3)的强度。
10.一种船舶,其特征在于,包括:船体以及如权利要求1至9任一项所述的无人帆船与其他船舶的模块化无轴推进系统。
技术总结
本申请公开了一种无人帆船与其他船舶的模块化无轴推进系统及船舶,一种无人帆船与其他船舶的模块化无轴推进系统及船舶包括壳体、候选桨叶模块、设置在壳体内的船桨装置,以及设置在壳体顶部且用于驱动船桨装置的驱动电机模块;船桨装置包括转筒模块和可拆卸安装在转筒模块内侧的目标桨叶模块,以及可拆卸安装在转筒模块外侧的齿轮模块,转筒模块通过连接模块与壳体可拆卸连接;候选桨叶模块可拆卸安装在转筒模块内侧,候选桨叶模块用于替换目标桨叶模块,且候选桨叶模块的桨距与目标桨叶模块的桨距不同。
技术研发人员:李梦苑,陈文龙,彭峣
受保护的技术使用者:李梦苑
技术研发日:20230511
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!