一种无人航行器的遥控牵引吊钩装置的制作方法
本技术属于无人航行器收放领域,尤其涉及一种无人航行器的遥控牵引吊钩装置。
背景技术:
1、无人航行器是一种无人驾驶的船只,它可以在水中自主航行,执行各种任务,如海洋勘探,海上巡逻,水下探测等。随着技术的不断进步,无人航行器的发展前景非常广阔。随着全球海洋经济的不断发展,无人航行器在海洋勘探,港口管理,海上交通管制等领域的需求越来越大。
2、无人航行器的回收和投放通常需要通过母船的绞车使用牵引索实现,现有的回收和释放方式多采用人工手动的方式将牵引索与无人航行器连接,但无人航行器本身无法载人,且在回收和释放过程中部分航行器需要一直保持一定的速度运行来保持本身的平衡,通过人工驾船靠近将牵引索与航行器上连接的方式较为繁琐且具有安全隐患,易损坏无人航行器的外壳。
3、进一步的,在无人航行器上安装的连接装置的情况,存在无法通过远程遥控的方式来控制牵引索的脱离的问题。
技术实现思路
1、本实用新型目的在于提供一种无人航行器的遥控牵引吊钩装置,以解决无人航行器在回收和释放过程中无需人工操作,自动实现牵引索与无人航行器的连接和脱离的技术问题。
2、为实现上述目的,本实用新型的一种无人航行器的遥控牵引吊钩装置的具体技术方案如下:
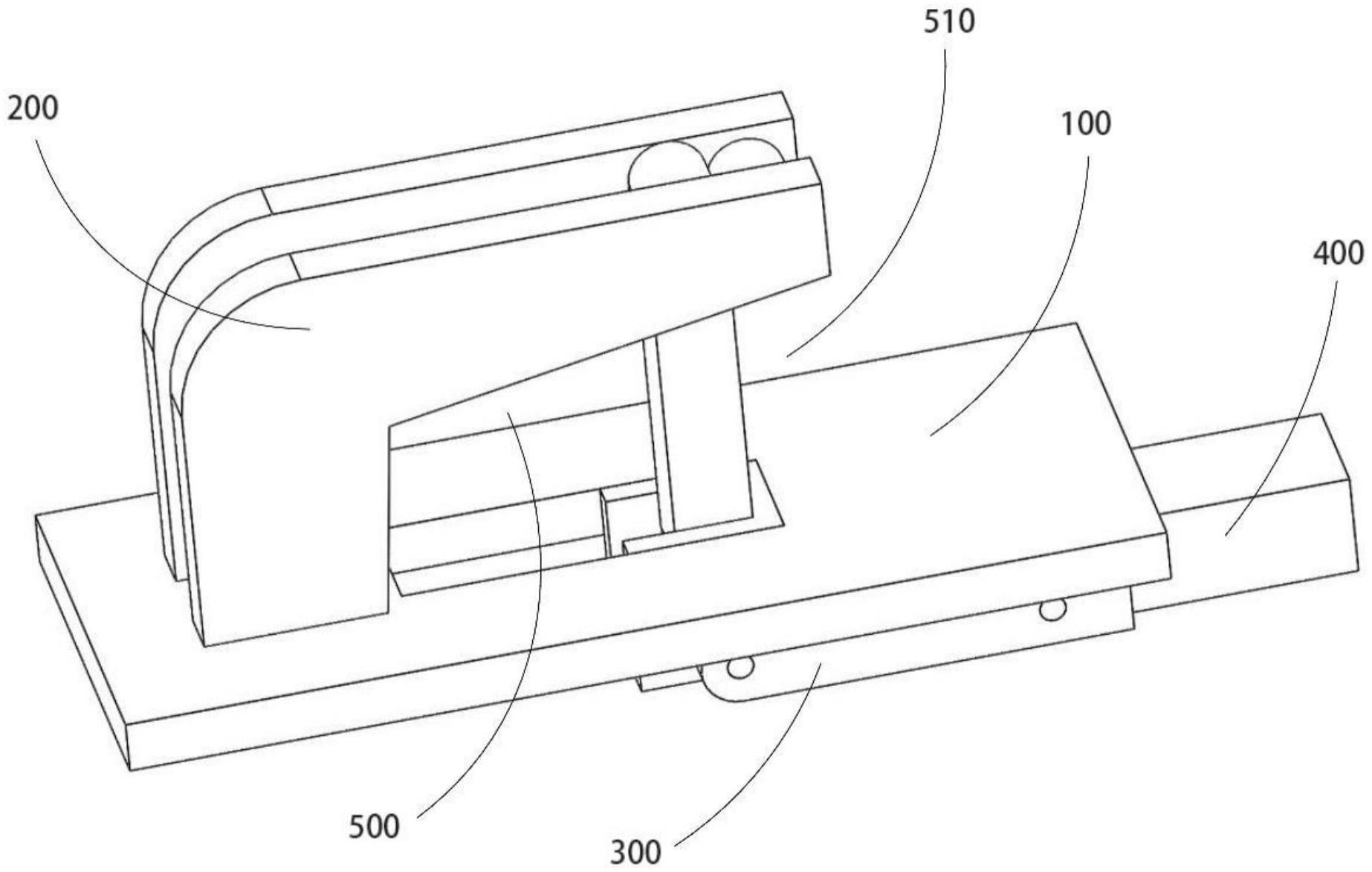
3、一种无人航行器的遥控牵引吊钩装置,包括与无人航行器连接的底座,与所述底座连接的吊钩结构和止索结构,以及与所述止索结构连接的驱动结构;
4、所述吊钩结构与所述底座之间形成用于放置牵引索的牵引索槽,所述牵引索通过进索口进入所述牵引索槽;
5、所述吊钩结构包括连接在所述底座上的吊钩支架,以及设置在所述吊钩支架紧靠所述进索口一端的挡杆;
6、所述止索结构包括止索架,连接在所述止索架上的止索轴和传动轴,可旋转连接在所述止索轴上的止索杆,以及可旋转连接在所述传动轴上的传动杆;
7、所述底座朝向所述吊钩结构的端面设置有止索槽,所述止索架能够在所述止索槽范围内运动,所述止索杆从所述止索槽中穿过向所述挡杆伸出,所述止索杆与所述挡杆抵接封闭所述进索口;
8、所述驱动结构包括与所述传动杆连接的驱动装置,以及控制所述驱动装置开闭的控制器;所述驱动装置驱动所述传动杆伸缩。
9、为了更好的实现止索轴和传动轴的固定,以及限制止索杆的顺时针运动,所述止索架包括连接块,以及设置在所述连接块两侧的连轴块;所述止索轴和传动轴分别与所述连轴块连接,所述止索轴设置在所述传动轴上方。
10、为了将止索杆和传动杆的旋转运动面错开,避免干扰,进一步的优化止索杆和传动杆的运动轨迹,所述止索杆连接在两块所述连轴块之间的止索轴上;所述传动轴一端穿过所述连轴块向外延伸,所述传动杆连接在所述传动轴的延伸部。
11、为了实现止索轴在旋转过后恢复初始位置,所述止索轴上设置有止索复位弹性件,所述止索复位弹性件平衡状态下使所述止索杆与所述连接块平行抵接,所述连接块限制所述止索杆顺时针运动。
12、为了实现传动轴在旋转过后恢复初始位置,所述传动轴上设置有传动复位弹性件,所述传动复位弹性件平衡状态下使所述传动杆收缩,所述连接块在所述止索槽内与所述底座垂直抵接。
13、为了保证挡杆和止索杆的稳定抵接,使止索杆在第一吊钩支架和第二吊钩支架之间与挡杆抵接,保证了进索口封闭的稳定性,所述吊钩支架包括设置在所述底座上的第一吊钩支架和第二吊钩支架,所述挡杆连接在所述第一吊钩支架和第二吊钩支架之间。
14、为了实现可以远程控制牵引索脱离连接装置,所述控制器为无线遥控装置,能够远程控制所述驱动装置的开闭。
15、为了避免止索架在所述止索槽内移动时的偏移,所述止索架的外尺寸与所述止索槽的内径匹配,
16、进一步实现止索轴和传动轴在旋转过后恢复初始位置,所述止索复位弹性件和所述传动复位弹性件为复位弹簧。
17、有益效果:
18、本实用新型的吊钩装置实现了无人航行器的水中回收,因无人航行器的特殊工况无法实现人工手持牵引索对无人航行器的连接,本实用新型的吊钩装置可以对母船上抛出的牵引索组实现稳定连接,同时在释放无人航行器时可以实现牵引索与连接装置的自动脱离,避免了人工操作的繁琐和安全隐患,以及无人航行器碰撞损坏的风险。
19、本实用新型的吊钩装置可以连接在无人航行器的任意位置,适应任意规格的航行器,结构紧凑,生产成本较低,便于维护。
技术特征:
1.一种无人航行器的遥控牵引吊钩装置,其特征在于,包括与无人航行器连接的底座,与所述底座连接的吊钩结构和止索结构,以及与所述止索结构连接的驱动结构;
2.根据权利要求1所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述止索架包括连接块,以及设置在所述连接块两侧的连轴块;
3.根据权利要求2所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述止索杆连接在两块所述连轴块之间的止索轴上;
4.根据权利要求1所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述止索轴上设置有止索复位弹性件,所述止索复位弹性件平衡状态下使所述止索杆与所述连接块平行抵接,所述连接块限制所述止索杆顺时针运动。
5.根据权利要求4所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述传动轴上设置有传动复位弹性件,所述传动复位弹性件平衡状态下使所述传动杆收缩,所述连接块在所述止索槽内与所述底座垂直抵接。
6.根据权利要求1所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述吊钩支架包括设置在所述底座上的第一吊钩支架和第二吊钩支架,所述挡杆连接在所述第一吊钩支架和第二吊钩支架之间。
7.根据权利要求1所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述控制器为无线遥控装置,能够远程控制所述驱动装置的开闭。
8.根据权利要求1所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述止索架的外尺寸与所述止索槽的内径匹配,止索架在所述止索槽内移动时不会偏移。
9.根据权利要求5所述的无人航行器的遥控牵引吊钩装置,其特征在于,所述止索复位弹性件和所述传动复位弹性件为复位弹簧。
技术总结
一种无人航行器的遥控牵引吊钩装置,包括与无人航行器连接的底座,与底座连接的吊钩结构和止索结构,以及与止索结构连接的驱动结构;吊钩结构与底座之间形成用于放置牵引索的牵引索槽,牵引索通过进索口进入牵引索槽;吊钩结构包括吊钩支架和挡杆;止索结构包括止索架,连接在止索架上的止索轴和传动轴,可旋转连接在止索轴上的止索杆,以及可旋转连接在传动轴上的传动杆;底座朝向吊钩结构的端面设置有止索槽,止索杆从止索槽中穿过向挡杆伸出,止索杆与挡杆抵接封闭所述进索口;驱动结构包括与传动杆连接的驱动装置,以及控制驱动装置开闭的控制器。本技术不需要人工手动操作,通过操作控制器实现无人航行器的释放和回收。
技术研发人员:苏野,李太平,赵明清,於俊坚
受保护的技术使用者:中船绿洲镇江船舶辅机有限公司
技术研发日:20230625
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!