一种水下机器人的制作方法
本技术涉及水下机器人,具体地说,涉及一种水下机器人。
背景技术:
1、随着技术发展,水下机器人成为海洋探索的重要工具。水下作业环境恶劣,对水下机器人的运动性能、控制性能及抗流能力提出高要求,水下机器人在水中能实现精确控制、全自由度运动成为必要。水下机器人的全自由度运动主要是指沿x轴方向前后运动,沿y轴方向左右运动,沿z轴方向的上下运动,以及绕x轴转动角度(横滚角度φ),绕y轴转动角度(俯仰角度θ),绕z轴转动角度(航向角度γ)。
2、现有的水下机器人运动实现方式主要有两种:方法一:推进器沿坐标系轴向放置:前进及竖直方向上放置推进器,实现前进/后退、沉浮、转向、俯仰的运动。方法二:推进器与机器成一定角度放置:x方向放置水平推进器,实现前进/后退运动;yoz平面上,放置与机身在y方向与z方向成一定角度的推进器,推进器产生的推力,分别作用于z方向实现沉浮运动,产生作用于y方向实现侧向运动,通过控制调整实现横滚、俯仰、转动运动。
3、目前的技术方案中存在以下问题:
4、方法一:保证了推进器效率的利用,但是机器的全自由度运动控制不能实现;
5、方法二:实现了机器的全自由度运动控制,但是带角度的布置导致推进器利用效率不高。
6、cn216374952u中公开了一种三组共六个推进器的智能水下机器人,其中上下方向的第二组推进器位于本体上,此时上下的俯仰动作较容易时间,但上下翻滚的动作相对来说实现起来比较困难,需要消耗推进器大量的能耗。
技术实现思路
1、本实用新型的目的在于提供一种水下机器人,以解决上述背景技术中提出的机器的全自由度运动控制不能实现,带角度的布置导致推进器利用效率不高,推进器功率浪费严重的问题。
2、为实现上述目的,本实用新型提供了一种水下机器人,包括机器人本体,所述机器人本体的侧面安装至少2组推进器阵列,所述机器人本体的中轴线上安装至少1组推进器阵列,3组推进器阵列共同实现机器人的姿态控制,每组推进器阵列包括至少2个推进器组件。
3、作为优选,至少有1组推进器阵列的至少2个推进器组件沿所述机器人本体的中轴线对称设置于所述机器人本体的两侧,至少有一组所述推进器阵列的至少1个推进器组件设置于所述机器人本体的中轴线上,位于所述机器人本体中轴线同侧的至少2个推进器与所述机器人本体的中轴线至少呈2个角度,同时,位于所述机器人本体中轴线上的至少2个推进器与所述机器人本体的中轴线至少呈2个空间角,所述机器人本体的推进器布置可使得推进机构向水下机器人的前后、左右和上下方向均能提供推力。
4、作为优选,至少有1组推进器阵列包含至少3个推进器组件,其中至少2个推进器组件沿所述机器人本体的中轴线对称设置于所述机器人本体的两侧,至少1个推进器组件设置在所述机器人本体的中轴线上。
5、作为优选,推进器组件包括壳体以及推进机构,壳体用于承载推进机构,推进机构是将电能、化学能等转化为机械能的装置,通过旋转叶轮或喷水的方式产生反推力推动机器人运动,推进器组件通过壳体与机器人本体连接,推进机构通过电机驱动,电机正转时推进机构产生的推力,电机反转时产生的推力方向相反。
6、作为优选,推进机构采用螺旋桨推进器或喷水推进器,螺旋桨推进器是由主机带动与桨叶相连的主轴转动,将水从桨叶的背压面吸入,从正压面流出,利用水的反作用力推动机器人运动的一种推进装置,其具有结构简单,推进效率高运用成熟等特点,喷水推进器是将水流从喷管大口吸入,小口喷出,在水流加速喷出的同时,机器人也获得一个反向的动量,从而满足机器人的推力需求,喷水推进器具有效率高、噪音小等特点,在本发明实施例中,对推进器组件的类型不作具体的限制。
7、作为优选,所述机器人本体的侧面安装2组推进器阵列,即第一推进器阵列和第三推进器阵列,所述机器人本体的轴线上安装1组推进器阵列,即第二推进器阵列,3组推进器阵列两两互成夹角,以使推进机构在三个方向上都能向所述机器人提供推力。
8、作为优选,所述第一推进器阵列包括第一推进器组件、第二推进器组件、第三推进器组件,所述推进器组件位于所述机器人本体的中轴线上,且所述第二推进器组件、第三推进器组件的连线中点处与所述推进器组件之间的距离为机器人本体长度的一半以上,所述第二推进器阵列包括第四推进器组件、第五推进器组件,所述第四推进器组件、第五推进器组件布置在所述机器人本体的中轴线上,所述第三推进器阵列包括第六推进器组件、第七推进器组件,所述第六推进器组件、第七推进器组件沿着所述机器人本体的中轴线对称布置在所述机器人本体的两侧。
9、作为优选,所述第六推进器组件、第三推进器组件通过固定机构连接在一起形成一个整体,所述第二推进器组件、第七推进器组件通过固定机构连接在一起形成一个整体,形成2个关于所述机器人本体的中轴线对称的整体,在所述机器人本体运输的过程中可将两个整体从所述机器人本体上拆卸下来。
10、作为优选,所述第一推进器阵列中的推进器组件沿机器人本体上下方向布置,第二推进器阵列中的推进器组件沿机器人本体的左右方向布置,第三推进器阵列中的推进器组件沿机器人本体中轴线前后方向布置
11、与现有技术相比,本实用新型的有益效果:
12、该水下机器人中,利用三个不同方向上的推进器阵列,使得推进机构向水下机器人的前后、左右和上下方向均能提供推力,实现了对水下机器人位置和姿态的控制,尤其实现了全角度的悬停控制和移动控制,极大提高了水下机器人的运动灵活性和控制精度,实现了水下机器人的全自由度运动控制,及推进器的高效利用。
技术特征:
1.一种水下机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)的侧面安装至少2组推进器阵列,所述机器人本体(1)的中轴线上安装至少1组推进器阵列,3组推进器阵列共同实现机器人的姿态控制,每组推进器阵列包括至少2个推进器组件。
2.根据权利要求1所述的水下机器人,其特征在于:所述推进器阵列至少有1组中的至少2个推进器组件沿机器人本体(1)的中轴线对称设置于机器人本体(1)的两侧,至少有1组所述推进器阵列的至少1个推进器组件设置于所述机器人本体(1)的中轴线上,位于所述机器人本体(1)中轴线同侧的至少2个推进器与所述机器人本体(1)的中轴线至少呈2个角度,同时,位于所述机器人本体(1)中轴线上的至少2个推进器与所述机器人本体的中轴线至少呈2个空间角,所述机器人本体(1)的推进器布置可使得推进机构向水下机器人的前后、左右和上下方向均能提供推力。
3.根据权利要求2所述的水下机器人,其特征在于:至少有1组推进器阵列包含至少3个推进器组件,其中至少2个推进器组件沿所述机器人本体(1)的中轴线对称设置于所述机器人本体(1)的两侧,至少1个推进器组件设置在所述机器人本体(1)的中轴线上。
4.根据权利要求1所述的水下机器人,其特征在于:推进器组件包括壳体以及推进机构,壳体用于承载推进机构,推进器组件通过壳体与机器人本体(1)连接。
5.根据权利要求4所述的水下机器人,其特征在于:推进机构采用螺旋桨推进器或喷水推进器。
6.根据权利要求3所述的水下机器人,其特征在于:所述机器人本体(1)的侧面安装2组推进器阵列,即第一推进器阵列(2)和第三推进器阵列(4),所述机器人本体(1)的轴线上安装1组推进器阵列,即第二推进器阵列(3)。
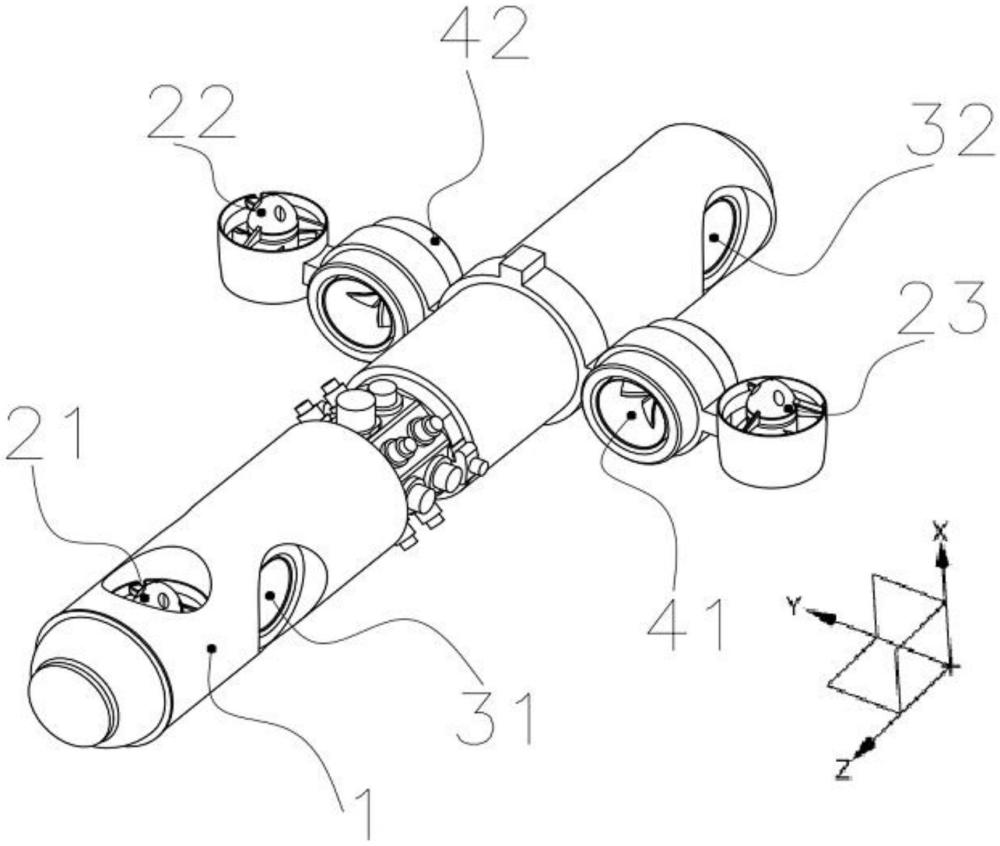
7.根据权利要求6所述的水下机器人,其特征在于:所述第一推进器阵列(2)包括第一推进器组件(21)、第二推进器组件(22)、第三推进器组件(23),所述推进器组件(21)位于所述机器人本体(1)的中轴线上且位于机器人本体(1)艏部,且所述第二推进器组件(22)、第三推进器组件(23)的连线中点处与所述推进器组件(21)之间的距离为机器人本体(1)长度的一半以上,所述第二推进器阵列(3)包括第四推进器组件(31)、第五推进器组件(32),所述第四推进器组件(31)、第五推进器组件(32)布置在所述机器人本体(1)的中轴线上,所述第三推进器阵列(4)包括第六推进器组件(41)、第七推进器组件(42),所述第六推进器组件(41)、第七推进器组件(42)沿着所述机器人本体(1)的中轴线对称布置在所述机器人本体(1)的两侧。
8.根据权利要求7所述的水下机器人,其特征在于:所述第六推进器组件(41)、第三推进器组件(23)通过固定机构连接在一起形成一个整体,所述第二推进器组件(22)、第七推进器组件(42)通过固定机构连接在一起形成一个整体,形成2个关于所述机器人本体(1)的中轴线对称的整体,在所述机器人本体(1)运输的过程中可将两个整体从所述机器人本体(1)上拆卸下来。
9.根据权利要求7所述的水下机器人,其特征在于:所述第一推进器阵列(2)中的推进器组件沿机器人本体(1)上下方向布置,第二推进器阵列(3)中的推进器组件沿机器人本体(1)的左右方向布置,第三推进器阵列(4)中的推进器组件沿机器人本体(1)中轴线前后方向布置。
技术总结
本技术涉及机器人技术领域,具体为一种水下机器人,包括机器人本体,机器人本体的侧面安装至少2组推进器阵列,机器人本体的轴线上安装至少1组推进器阵列,3组推进器阵列共同实现机器人的姿态控制,每组推进器阵列包括至少2个推进器组件。该水下机器人中,机器人的推进器布置可使得推进机构向的水下机器人的前后、左右和上下方向均能提供推力,实现了对水下机器人位置和姿态的控制,尤其实现了全角度的悬停控制和移动控制,极大提高了水下机器人的运动灵活性和控制精度,实现了水下机器人的全自由度运动控制,及推进器的高效利用。
技术研发人员:张澳,方秋涓
受保护的技术使用者:深圳潜行创新科技有限公司
技术研发日:20230725
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!