双推杆式全向矢量推进装置及潜航器的制作方法
本技术涉及水下设备领域,具体地,涉及一种双推杆式全向矢量推进装置及潜航器,尤其地,涉及一种双推杆解耦式全向单矢量推进装置及潜航器。
背景技术:
1、随着海洋技术的发展,水下设备相关技术得到迅猛发展,水下无人潜航器(uuv)作为水下军用和民用探测设备的重要组成部分,被广泛应用与海洋环境监测、海洋资源勘探、军事侦察与对抗等众多领域。面对复杂的海洋环境,高操控性和高稳定性逐步成为未来潜航器的发展方向。而推进装置对潜航器的机动性和稳定性起着至关重要的作用。
2、现有无人潜航器的推进系统多为舵控螺旋桨推进,依靠舵来改变推力方向,难以有效运用在航速较低或者空间狭小的领域。单矢量推进航行器的推进装置具有结构紧凑、运动阻力小、转弯半径小、低速时稳定性好、操控性能好等一系列优点,是一种具有广阔运用前景的推进装置。目前单矢量推进装置普遍存在结构复杂、占用空间大、运动副之间存在耦合等问题。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种双推杆式全向矢量推进装置及潜航器。
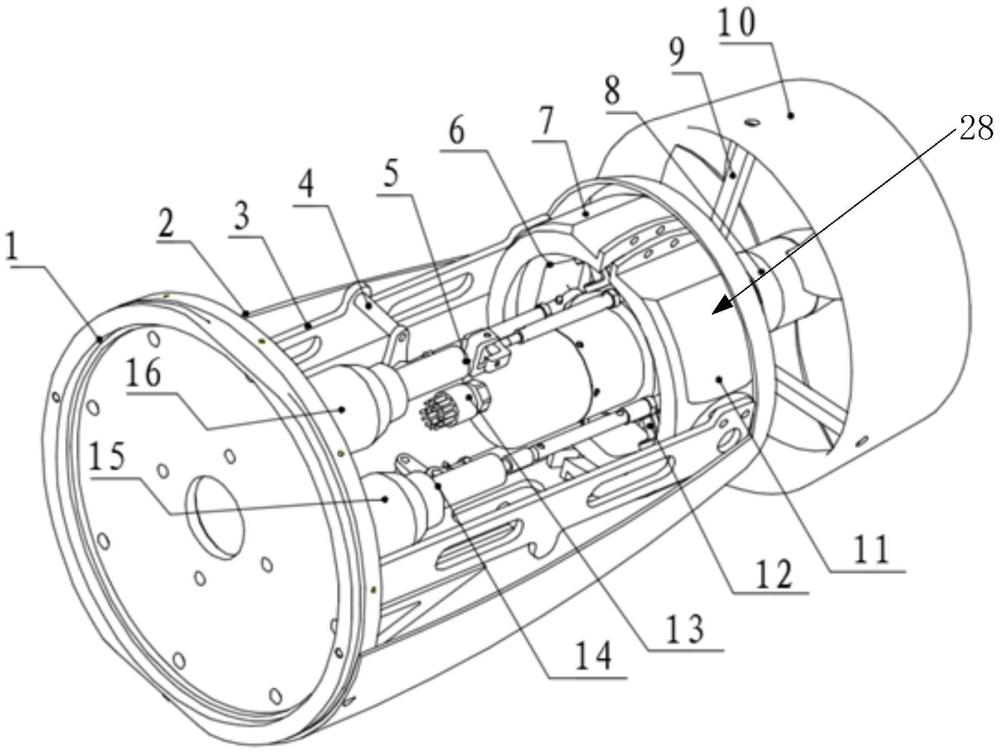
2、根据本实用新型提供的一种双推杆式全向矢量推进装置,包括矢量推进机构、螺旋桨推进系统、外壳以及附属零件;
3、矢量推进机构包括俯仰传动链与偏航传动链;外壳包括罩壳;附属零件包括安装板、框架、外球台以及内球台;
4、所述框架固连在安装板上,外球台固定在框架上;
5、所述罩壳的一端固定在安装板上,另一端与外球台连接;
6、内球台安装在外球台内部,形成球面运动副。
7、俯仰传动链的一端安装在安装板上,另一端与内球台连接;
8、偏航传动链的一端安装在安装板上,另一端与内球台连接。
9、优选的,罩壳为水动力的流线线型罩壳。
10、优选的,俯仰传动链包括依次连接的俯仰推进电机、万向节、俯仰推杆、第一球关节;
11、所述俯仰推进电机安装在安装板上,第一球关节与所述内球台相连。
12、优选的,偏航传动链包括依次连接的偏航推进电机、铰链、偏航推杆以及第二球关节;
13、所述偏航推进电机安装在安装板上;第二球关节与所述内球台相连。
14、优选的,矢量推进机构还包括辅助传动链;
15、辅助传动链包含两对运动原理相同的曲柄摆杆机构,曲柄摆杆机构包括支撑杆、第一曲柄、第三球关节、辅助推杆、第四球关节;
16、所述支撑杆的一端与框架连接,另一端与第一曲柄相连,所述第一曲柄与第三球关节相匹配,第三球关节、辅助推杆、第四球关节依次连接。
17、优选的,所述俯仰传动链与偏航传动链在空间平面内呈90°布置,辅助传动链中的两对曲柄摆杆机构在空间平面内呈90°布置。
18、优选的,外球台包括第一外球台以及第二外球台,所述第一外球台与第二外球台均为半球结构,第一外球台与第二外球台通过紧固件相连接。
19、优选的,所述螺旋桨推进系统包括螺旋桨推进器、肋骨、导管、水密连接器以及对中支撑杆;
20、螺旋桨推进器的一端位于罩壳内且连接有水密连接器,螺旋桨推进器的另一端延伸至罩壳外,且与导管通过肋骨连接;
21、所述对中支撑杆用于固定螺旋桨推进器,使螺旋桨推进器穿过内球台的球心位置。
22、优选的,俯仰推进电机与偏航推进电机均为为带自锁的水密直线电机。
23、根据本实用新型提供的一种潜航器,采用所述的双推杆式全向矢量推进装置。
24、与现有技术相比,本实用新型具有如下的有益效果:
25、1、本实用新型结构简单,占用空间小,俯仰传动链和偏航传动链可单独驱动,以实现螺旋桨推进系统的全向转动,并且俯仰传动链和偏航传动链的运动之间不存在相互影响,因此该机构运动之间不存在耦合。
26、2、本实用新型的偏转角度大,即本实用新型通过球关节的设置能够增大机构的偏转角度。
27、3、本实用新型抗流能力强,稳定性好,即本实用新型中所述辅助传动链能够增加整个机构运动的稳定性,提升机构的抗干扰能力。
技术特征:
1.一种双推杆式全向矢量推进装置,其特征在于,包括矢量推进机构、螺旋桨推进系统、外壳以及附属零件;
2.根据权利要求1所述的双推杆式全向矢量推进装置,其特征在于,罩壳(2)为水动力的流线线型罩壳。
3.根据权利要求1所述的双推杆式全向矢量推进装置,其特征在于,俯仰传动链(5)包括依次连接的俯仰推进电机(16)、万向节(17)、俯仰推杆(18)、第一球关节(19);
4.根据权利要求3所述的双推杆式全向矢量推进装置,其特征在于,偏航传动链(14)包括依次连接的偏航推进电机(15)、铰链(20)、偏航推杆(21)以及第二球关节(22);
5.根据权利要求1所述的双推杆式全向矢量推进装置,其特征在于,矢量推进机构还包括辅助传动链(4);
6.根据权利要求5所述的双推杆式全向矢量推进装置,其特征在于,所述俯仰传动链(5)与偏航传动链(14)在空间平面内呈90°布置,辅助传动链中的两对曲柄摆杆机构在空间平面内呈90°布置。
7.根据权利要求1所述的双推杆式全向矢量推进装置,其特征在于,外球台(28)包括第一外球台(7)以及第二外球台(11),所述第一外球台(7)与第二外球台(11)均为半球结构,第一外球台(7)与第二外球台(11)通过紧固件相连接。
8.根据权利要求1所述的双推杆式全向矢量推进装置,其特征在于,
9.根据权利要求4所述的双推杆式全向矢量推进装置,其特征在于,俯仰推进电机(16)与偏航推进电机(15)均为为带自锁的水密直线电机。
10.一种潜航器,其特征在于,采用权利要求1至9任一项所述的双推杆式全向矢量推进装置。
技术总结
本技术提供了一种双推杆式全向矢量推进装置及潜航器。双推杆式全向矢量推进装置,包括矢量推进机构、螺旋桨推进系统、外壳以及附属零件;矢量推进机构包括俯仰传动链与偏航传动链;外壳包括罩壳;附属零件包括安装板、框架、外球台以及内球台;所述框架固连在安装板上,外球台固定在框架上;内球台安装在外球台内部,形成球面运动副。俯仰传动链的一端安装在安装板上,另一端与内球台连接;偏航传动链的一端安装在安装板上,另一端与内球台连接。本技术结构简单,占用空间小,俯仰传动链和偏航传动链可单独驱动,以实现螺旋桨推进系统的全向转动,并且俯仰传动链和偏航传动链的运动之间不存在相互影响,因此该机构运动之间不存在耦合。
技术研发人员:宋展宏,高咏,邓旭,刘帅,安树阳
受保护的技术使用者:上海船舶电子设备研究所(中国船舶集团有限公司第七二六研究所)
技术研发日:20231024
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!