一种跨域协同海上风电运维无人系统及方法
本发明涉及海上风电运维领域,具体地说是涉及一种跨域协同海上风电运维无人系统及方法。
背景技术:
1、在全球能源趋紧和节能减排双重重压之下,新的可再生能源受到无比青睐。相对价格偏高的太阳能发电和已经接近饱和的水电资源,风力发电最受追捧。而其中,海上风电在发电稳定性、电网接入便利性、土地节省等多方面均优于陆上风电,海上风电产业的发展具有较大潜力。海上风电是指在海洋中建设风力发电设施以利用海风发电的一种可再生能源技术。
2、海上风电运维是指对风电机组(桩基、海缆、风叶等)的定期检修和日常维护。海上气候多变,受大风、洋流以及大雾等天气影响,海上风电运维窗口期短、可达性差,即难以到达风电现场开展全生命周期运维工作,造成运维难度加大和运维成本提升,因此解决可达性是海上风电运维的关键。具体而言,“可达性”包括水面的可达性、空中可达性和水下的可达性。
3、目前,海上风电运维方式主要有人工运维、有人船运维、大型普通运维母船运维。在恶劣的海上环境,人工运维存在可达性差、安全性差的问题,特别是水下可达性更差;有人船运维存在出航率低、航道风险高、舒适性差、靠不上桩基、费用高等缺点;大型普通运维母船存在运维效率低、成本高等缺点。
技术实现思路
1、基于上述技术问题,本发明提出一种跨域协同海上风电运维无人系统,该系统可实现空中-海面-水下融合的跨域协同,解决风电运维可达性等技术难题,降低运维成本,提高运维效率。同时,本发明还提出一种跨域协同海上风电运维方法。
2、本发明所采用的技术解决方案是:
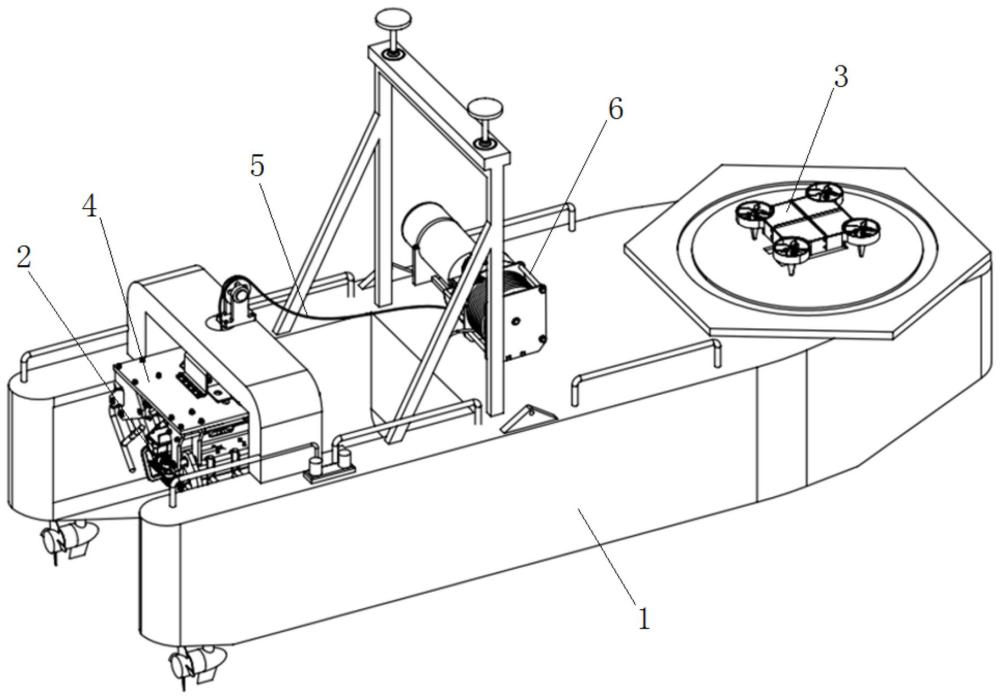
3、一种跨域协同海上风电运维无人系统,包括无人艇、水下运维机器人和无人机,无人艇包括无人艇本体,在无人艇本体的底部设置有全回转推进器,在无人艇本体的头部设置有用于无人机起降的停机坪,无人机停放在停机坪上;
4、所述无人艇本体的尾部两侧分别设置有第一船舷体和第二船舷体,在第一船舷体和第二船舷体之间形成有用于布放和回收水下运维机器人的收放空间;在收放空间的上方设置有支撑横梁,支撑横梁的两端分别与第一船舷体和第二船舷体相连接,在支撑横梁上设置有用于夹紧和释放水下运维机器人的收放装置;
5、所述水下运维机器人通过脐带缆与无人艇本体连接,在无人艇本体的中部设置有用于控制脐带缆收放的绞车。
6、优选的,所述收放装置包括固定板,在固定板的底部两端设置有悬臂,悬臂的底端与摆动臂的一端铰接,摆动臂的另一端连接机械爪,摆动臂与用于驱动其摆动进而带动机械爪开合的液压结构相连接。
7、优选的,所述悬臂呈竖向布置,悬臂和摆动臂均处于竖直面内,摆动臂在竖直面内沿其与悬臂的铰接点来回摆动;
8、所述机械爪包括用于卡在水下运维机器人底面的支撑底板,支撑底板通过第一连接板与摆动臂固定连接;
9、在支撑底板上还设置有用于与水下运维机器人的侧面相贴合的侧面防护板,侧面防护板通过第二连接板与第一连接板固定连接。
10、优选的,所述固定板还连接有用于对水下运维机器人的顶面进行限位防护的限位顶板,在限位顶板上设置有限位传感器;
11、在限位顶板的两侧均设置有若干个竖向嵌入板,在侧面防护板上设置有与竖向嵌入板相适配的条形空隙,当侧面防护板运动至与水下运维机器人的侧面相贴合时,竖向嵌入板恰好处于条形空隙中;
12、所述支撑底板、第一连接板和第二连接板均呈栅栏状;
13、固定板的中心顶部通过安装板与支撑横梁相连接,在限位顶板、固定板、安装板和支撑横梁上均设置有用于脐带缆穿过的通孔。
14、优选的,所述绞车包括电机和绞盘,电机通过传动齿轮组与绞盘传动连接,所述脐带缆缠绕在绞盘上;在支撑横梁上且对应脐带缆穿过的位置处还设置有导向定滑轮。
15、优选的,所述水下运维机器人包括负载框架,在负载框架的顶部设置有浮力材料;在负载框架上设置有垂向推进器、水平推进器和侧向推进器;在负载框架上还搭载有水下探测传感器和摄像机。
16、优选的,所述全回转推进器设置多个,全回转推进器布置在第一船舷体和第二船舷体的底部末端;
17、无人艇本体上搭载有多波束测深系统和侧扫声呐;
18、在无人艇本体的中部设置有三角支架,在三角支架上设置有通信系统;
19、在无人艇本体上还设置有控制系统,控制系统与通信系统连接,控制系统还分别连接全回转推进器、绞车和收放装置。
20、优选的,所述无人机包括无人机本体,在无人机本体上设置有用于对空中环境和风电叶片进行监测的监测设备。
21、本发明还提供一种跨域协同海上风电运维方法,采用如上所述的系统,步骤如下:无人艇搭载水下运维机器人和无人机,在全回转推进器的动力驱动下行驶到指定作业位置;
22、通过控制绞车和收放装置对水下运维机器人进行布放,通过水下运维机器人对海上风电设施的水下状态进行观测;控制无人机起飞,通过无人机对海上风电设施的空中状态进行观测;通过无人艇对海上风电设施区域海面、海底状态进行观测;
23、观测任务完成后,通过控制绞车和收放装置对水下运维机器人进行回收,无人机返回停放在停机坪上,无人艇搭载水下运维机器人和无人机返航。
24、上述水下运维机器人的布放与回收过程如下:
25、(1)无人艇行驶到指定作业位置,需要布放水下运维机器时,启动收放装置,通过液压结构带动摆动臂运动,摆动臂带动机械爪打开;
26、(2)启动绞车的电机,电机通过传动齿轮组带动绞盘旋转,进而释放脐带缆;
27、(3)水下运维机器人在自身重力作用下进入到水下,然后通过垂向推进器、水平推进器和侧向推进器控制水下运维机器人运动,当水下运维机器人到达水下目标位置后,进行水下作业;
28、(4)水下作业完成后,通过垂向推进器、水平推进器和侧向推进器控制水下运维机器人上浮到水面并运动至靠近无人艇附近的位置处,通过绞车的电机带动绞盘反向旋转,进行脐带缆的回收;
29、(5)脐带缆带动水下运维机器人移动至第一船舷体和第二船舷体之间的收放空间,水下运维机器人处于支撑横梁的正下方;
30、(6)通过绞车继续回收脐带缆,脐带缆带动水下运维机器人竖直向上运动,当水下运维机器人的顶面与限位顶板接触后,绞车的电机停止转动;
31、(7)收放装置通过液压结构带动摆动臂运动,摆动臂带动机械爪闭合,使得机械爪的支撑底板贴合水下运维机器人的底面,机械爪的侧面防护板与水下运维机器人的侧面相贴合,完成回收。
32、本发明的有益技术效果是:
33、本发明海上风电运维无人系统可实现空中、海面和水下融合的跨域协同,克服严苛的海洋环境给运维作业带来的诸多不便,有效延长运维窗口期,同步实现海上风电运维的水面可达性、水下可达性和空中可达性,降低运维成本,提高运维效率、提升海上风电场的安全性,实现海上风电智慧运维。
34、本发明中的无人艇本体采用双体结构设计,即包括第一船舷体和第二船舷体,在双体结构之间形成收放空间,该结构设计方式即提升了无人艇本体的抗风浪能力,以及其测量精准度,又方便了水下运维机器人的布放与回收。
35、本发明通过绞车和收放装置对水下运维机器人进行布放和回收,如回收时先通过绞车将水下运维机器人提升到一定高度,然后利用收放装置中的机械爪对水下运维机器人进行固定。此回收和布放结构具有安全和稳定性高,可对回收后水下运维机器人起到较好防护等效果,为水下运维机器人的稳定运行提供保障。
- 还没有人留言评论。精彩留言会获得点赞!