一种船舶追越模型试验船模间距确定以及间距控制方法与流程
本发明涉及船舶水动力学,尤其是一种船舶追越模型试验船模间距确定以及间距控制方法。
背景技术:
1、在冰区航行时,由于航道的宽度较小,而且冰区航行阻力大,操纵能力下降,冰区航行因航向多变,尤其受流冰、船速、操纵性和目的地等原因,不可避免地会发生船舶追越操纵行为。船舶在追越过程中,因相对速度小,延续时间长,容易产生相互作用,其结果使双方都受到左右不平衡的力或转头力矩的影响而偏离各自的航线或产生转头。据已有资料显示,因船船追越过程中的船吸现象而导致船舶追越过程碰撞事故的发生。
2、现有的船船追越操纵模拟水动力船模试验缺乏具有相对运动产生的动态过程船舶追越操纵模拟,目前未见船船追越水池模型试验船模间距确定方法及横向间距控制算法。
3、船船追越航行与操纵的一般过程是船舶通过推进系统以及操舵系统追越上前方船只,同时要求船与船之间保持一定的安全横向间距。
4、船船追越操纵水池模型试验模拟,需要解决试验系统中船模与船模之间的横向间距确定技术问题以及间距的控制算法技术问题,否则无法模拟整个操纵过程。
5、为此我们提出一种船舶追越模型试验船模间距确定以及间距控制方法。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种船舶追越模型试验船模间距确定以及间距控制方法,同时通过间距保持自动控制算法,最终实现两条船模模拟追越模型试验。
2、本发明所采用的技术方案如下:
3、一种船舶追越模型试验船模间距确定方法,包括如下步骤:
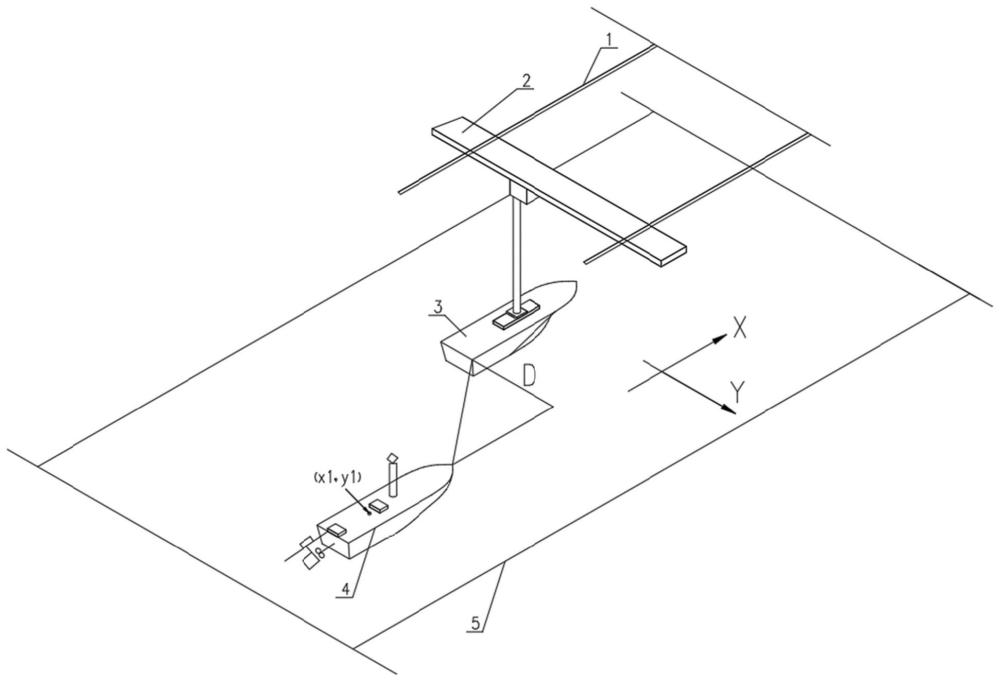
4、s1、船模加工以及冰区航道的模拟;按照实船以及实际冰区航道比例缩放加工出两艘船模以及模拟冰区航道,两艘船模分别是船模一和船模二,分别在航模一3和航模二4上设置有被观测装置进行位置定位;
5、s2、设置航模一3的航线;沿模拟冰区航道布置轨道,并在轨道上设置有沿轨道方向移动的拖车,船模一通过连接件连接在拖车上并沿着轨道路径移动,同时船模一悬浮在模拟冰区航道内,并拟合出航行轨迹曲线;
6、ax+by+c=0 (1)
7、式中,系数a、b、c是船模一运动产生的轨迹直线方程的系数;
8、s3、设置航模二4的航线;航模二4位于航模一3移动路径的侧后方,并通过远程控制主动航行在模拟冰区航道中,对航模一3进行追越;
9、s4、船模一和船模二的横向距离计算;将拟合处的公式(1)中的参数,以及s3测得的船模二的重心点坐标(x1,y1)代入到公式(2)中,得到横向间距值;
10、
11、式中(x1,y1)坐标是船模二(4)重心在固定坐标系中的坐标值。
12、进一步的,船模一和船模二,同时船模一和船模二的吃水量偏差在20%之内。
13、进一步的,模拟冰区航道呈直线设置,且保持水温在0摄氏度,其内设置有少量冰渣。
14、更进一步的,s2中的连接件具备一定的轴向伸缩率,使得船模一依靠自身重力悬浮在模拟冰区航道内,使得吃水量得到控制。
15、进一步的,航模二4上安装有驱动机构,并能够远程控制。
16、更进一步的,还包括光学测量系统,其布置在模拟冰区航道的上端,以模拟冰区航道为基准建立坐标系,同时通过被观测装置对船模一和船模二的位置进行实施标定。
17、进一步的,一种船舶追越模型试验船模间距控制方法,延用了前述的一种船舶追越模型试验船模间距确定方法。
18、更进一步的,还包括航线控制环、航向控制环和舵角控制环,航线控制环与航向控制环相互独立,并联使用,两者共同使用舵角控制环;
19、航线控制环将光学测量系统所测得的船位与计划航线比较,直接计算出船模二的指令舵角,传递给舵角控制环:
20、航向控制环对船模二上的罗经(陀螺)来的实际航向与船模一的航向进行比较,计算出指令舵角传递给舵角控制环;
21、舵角控制环,使实际舵角与指令舵角一致,通过船模一的航迹控制与航向控制间接以实现追越过程模拟船模试验。
22、进一步的,航线控制环和航向控制环采用双参数控制算法进行计算。
23、更进一步的,横向间距双参数控制算法如下式(3)所示:
24、
25、θ为船模二的舵角,α为船模二航向角,为船模二航向角速度;β为船模一和船模二之间横向间距,为船模一和船模二之间横向间距的微分值,k1,k2,k3,k4间距控制双参数算法的系数。
26、本发明的有益效果如下:
27、本发明船船追越过程模拟模型试验中船模间距的确定方法简洁、方便,而且间距的控制方法同时集结了航迹控制直接方法和航向控制方法的优点,具有良好的控制性能,保障了船舶超越操纵水池试验模拟及完成船模之间的间距控制。船模航迹控制直接法是建立在舵角与航迹偏差、偏航角速度等的联系上,通过直接控制舵角来消除航迹偏差。此法能对位置、方向、速度这些实际上耦合的参量进行综合考虑,可达到的控制性能更优良。
技术特征:
1.一种船舶追越模型试验船模间距确定方法,其特征在于,包括如下步骤:
2.如权利要求1所述的一种船舶追越模型试验船模间距确定方法,其特征在于:所述船模一(3)和船模二(4),同时船模一(3)和船模二(4)的吃水量偏差在20%之内。
3.如权利要求1所述的一种船舶追越模型试验船模间距确定方法,其特征在于:所述模拟冰区航道(5)呈直线设置,且保持水温在0摄氏度,其内设置有少量冰渣。
4.如权利要求1所述的一种船舶追越模型试验船模间距确定方法,其特征在于:所述s2中的连接件具备一定的轴向伸缩率,使得船模一(3)依靠自身重力悬浮在模拟冰区航道(5)内,使得吃水量得到控制。
5.如权利要求1所述的一种船舶追越模型试验船模间距确定方法,其特征在于:所述航模二4上安装有驱动机构,并能够远程控制。
6.如权利要求1-5任一项所述的一种船舶追越模型试验船模间距确定方法,其特征在于:还包括光学测量系统,其布置在模拟冰区航道(5)的上端,以模拟冰区航道(5)为基准建立坐标系,同时通过被观测装置对船模一(3)和船模二(4)的位置进行实施标定。
7.一种船舶追越模型试验船模间距控制方法,其特征在于:延用了如权利要求6所述的一种船舶追越模型试验船模间距确定方法。
8.如权利要求7所述的一种船舶追越模型试验船模间距控制方法,其特征在于:还包括航线控制环、航向控制环和舵角控制环,航线控制环与航向控制环相互独立,并联使用,两者共同使用舵角控制环;
9.如权利要求8所述的一种船舶追越模型试验船模间距控制方法,其特征在于:所述航线控制环和航向控制环采用双参数控制算法进行计算。
10.如权利要求9所述的一种船舶追越模型试验船模间距控制方法,其特征在于:所述横向间距双参数控制算法如下式(3)所示:
技术总结
本发明涉及一种船舶追越模型试验船模间距确定以及间距控制方法,包括如下步骤:S1、船模加工以及冰区航道的模拟;S2、设置航模一3的航线,并拟合出航行轨迹曲线;S3、设置航模二的航线;S4、船模一和船模二的横向距离计算;本发明船船追越过程模拟模型试验中船模间距的确定方法简洁、方便,而且间距的控制方法同时集结了航迹控制直接方法和航向控制方法的优点,具有良好的控制性能,保障了船舶超越操纵水池试验模拟及完成船模之间的间距控制。此法能对位置、方向、速度这些实际上耦合的参量进行综合考虑,可达到的控制性能更优良。
技术研发人员:赵桥生,祖永恒,王志鹏,朱成琳,国威,王探靖
受保护的技术使用者:中国船舶科学研究中心
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!