基于水下管道智能巡检的机器人及巡检方法
本发明涉及水中巡检,尤其涉及基于水下管道智能巡检的机器人及巡检方法。
背景技术:
1、随着1953年第一艘人工智能潜水艇的出现,水下智能机器人一直不仅仅活跃在军工领域。随着民用领域人工智能渐渐开发之后,市面上出现了一款水下机器人,背部设置有计算控制单元、电源、动力系统,能在水中游动,身高为5英尺使用触觉反馈系统来进行动作,可以传递它使用东西的感受。并且,随着陆地资源的过度开发,海洋的开发也渐渐兴起,水下机器人的市场在未来也会慢慢随着无人机市场一样火热,在水产养殖、管道清洁、娱乐消费都会有很大的待开发潜力。
2、目前,相关技术中检查水下管道效率低、精度差的技术问题,尚未得到有效地解决方案。
技术实现思路
1、本发明的目的是提供基于水下管道智能巡检的机器人及巡检方法,以解决相关技术中检查水下管道效率低、精度差的问题。
2、为了实现上述目的,本发明采用了如下技术方案:
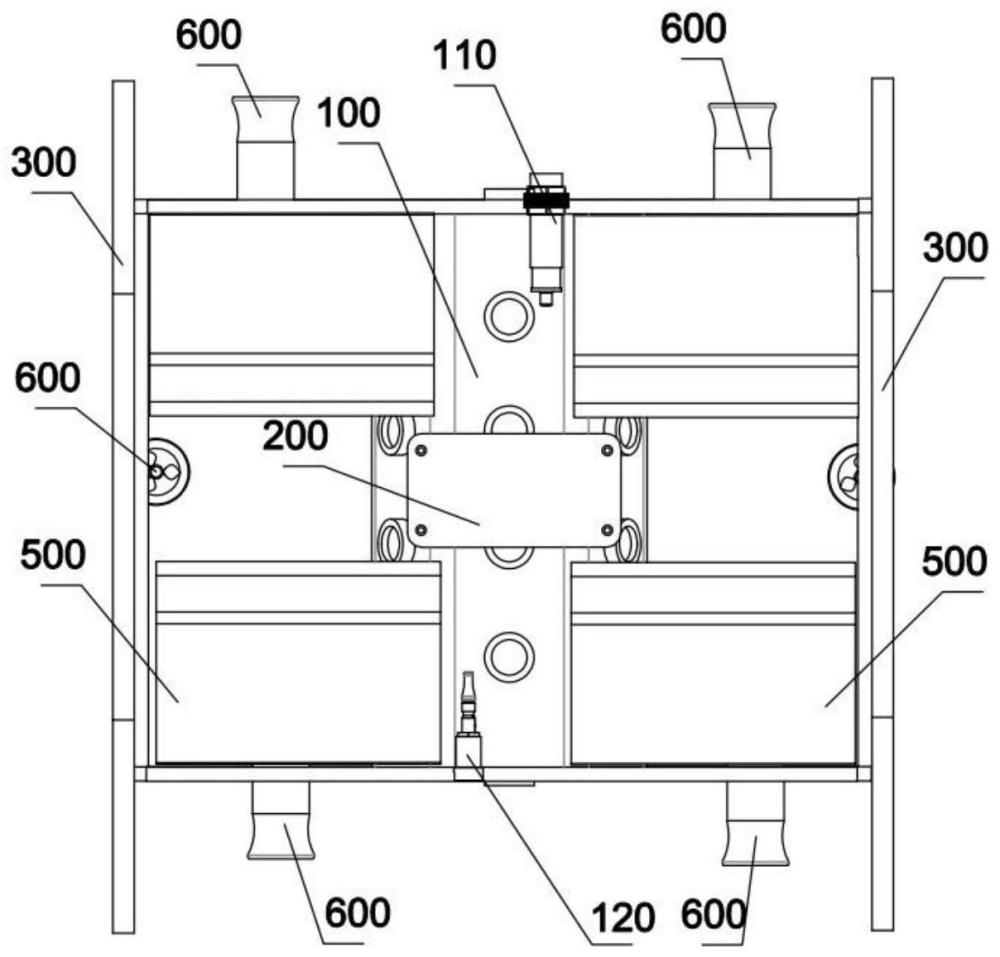
3、基于水下管道智能巡检的机器人,包括:主控舱、框架以及侧板,框架为长方体,主控舱通过螺栓固定连接在框架的内部,侧板固定连接在框架的两侧;框架上固定连接有推进器,推进器包括涡轮,推进器通过控制接口与主控舱连接。
4、进一步地,框架的正面与背面各安装有两个推进器,其中,安装在框架正面的推进器朝向正面,安装在框架背面的推进器朝向背面;框架的两个侧面各安装有一个推进器,其中,安装在侧面的推进器朝向上面。
5、进一步地,主控舱的顶部通过螺栓固定连接有主控模块。
6、进一步地,框架顶部设置有泡沫块,泡沫块固定连接在框架顶部的外侧。
7、进一步地,泡沫块固定连接在框架的四角,泡沫块高于主控模块。
8、进一步地,主控舱顶部的端部固定连接有灯光报警模块以及摄像头模块;主控舱底部的端部固定连接有红外避障模块以及深度传感器。
9、为了实现上述目的,依据上述基于水下管道智能巡检的机器人,本发明还采用了如下技术方案:
10、基于水下管道智能巡检的巡检方法,包括:机器人包括主控模块、推进器、灯光报警模块、摄像头模块、红外避障模块以及深度传感器,主控模块控制推进器、灯光报警模块、摄像头模块、红外避障模块以及深度传感器;设定出发路线、巡检路线以及返回路线,其中,出发路线为机器人从出发点至巡检点的路线,巡检路线为机器人巡检时的路线,返回路线为结束点至出发点的路线,巡检路线为巡检点至结束点。
11、进一步地,主控模块控制推进器驱动机器人,当改变推进器中涡轮的转动方向时,机器人的运动方向改变;依据出发路线驱动机器人至巡检点;依据巡检路线驱动机器人巡检;依据返回路线驱动机器人返回出发点。
12、进一步地,将摄像头模块的图像数据通过主控模块实时传输至用户,并将图像数据传输存储至外部存储器;将深度传感器的深度数据通过主控模块实时传输至用户,并将深度数据传输存储至外部存储器。
13、进一步地,当红外避障模块识别到障碍时生成报警信息,将报警信息通过主控模块通知用户;灯光报警模块依据报警信息发出闪光。
14、相比于现有技术,本发明的有益技术效果为:
15、主控舱通过螺栓固定连接在框架的内部,侧板固定连接在框架的两侧,这确保了整个设备的稳定性和可靠性。即使在复杂或恶劣的环境条件下,也能保持设备的正常运作。主控舱、框架和侧板的结构设计使得设备易于组装和维修。如果某个部分出现问题,可以快速、方便地进行更换,降低了维护成本。推进器采用涡轮设计,能够提供高效的推进力。通过控制接口与主控舱连接,可以精确控制推进器的运行,确保机器人的稳定移动。推进器的设计考虑到了模块化,这使得推进器本身也具有一定的可维护性和可替换性。如果需要更换或升级推进器,操作会相对简单。主控舱固定在框架内部,侧板连接在框架两侧,这种布局方式优化了内部空间的使用,使得设备内部各个组件的布局更为紧凑和合理。
16、主控模块控制其他模块可以使各个模块协同工作,提高机器人的整体工作效率。摄像头模块和深度传感器用于数据采集,红外避障模块用于障碍检测,这些数据可以用于分析环境、规划路线等,进一步提升了机器人的智能化水平。通过红外避障模块,机器人可以在行进过程中检测到障碍物,避免碰撞,提高了设备的安全性。这种设计方式为未来的功能扩展预留了空间,未来可以加入更多的传感器模块或执行器模块,以增加机器人的功能。
技术特征:
1.基于水下管道智能巡检的机器人,其特征在于,包括:
2.根据权利要求1所述的基于水下管道智能巡检的机器人,其特征在于,包括:
3.根据权利要求1所述的基于水下管道智能巡检的机器人,其特征在于,包括:
4.根据权利要求3所述的基于水下管道智能巡检的机器人,其特征在于,包括:
5.根据权利要求4所述的基于水下管道智能巡检的机器人,其特征在于,包括:
6.根据权利要求1所述的基于水下管道智能巡检的机器人,其特征在于,包括:
7.基于水下管道智能巡检的巡检方法,其特征在于,应用于上述权利要求1-6中的任意一项所述的基于水下管道智能巡检的机器人,包括:
8.根据权利要求7所述的基于水下管道智能巡检的巡检方法,其特征在于,包括:
9.根据权利要求7所述的基于水下管道智能巡检的巡检方法,其特征在于,包括:
10.根据权利要求7所述的基于水下管道智能巡检的巡检方法,其特征在于,包括:
技术总结
本发明公开了基于水下管道智能巡检的机器人及巡检方法。涉及水中巡检技术领域,该发明包括:主控舱、框架以及侧板,框架为长方体,主控舱通过螺栓固定连接在框架的内部,侧板固定连接在框架的两侧;框架上固定连接有推进器,推进器通过控制接口与主控舱连接。通过本发明,解决了相关技术中检查水下管道效率低、精度差的问题。
技术研发人员:谢岳,张东福,贺一通,朱迪,李锦华,杨勐,林晓虎
受保护的技术使用者:中国人民解放军陆军航空兵学院
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!