用于远程驾驶双飞行员飞机以扩大航程的方法和系统与流程
用于远程驾驶双飞行员飞机以扩大航程的方法和系统
背景技术:
[0001]
能够在大约10.5小时的飞行时间内飞行超过4500海里的当前单通道飞机的出现呈现了以下问题:飞行机组人员可以在国家或航空公司标准限制的时间段内主动驾驶飞机。例如,两个人在美国只能合法飞行八小时。由于就每英里的操作成本而言它们具有非常好的成本效益,这种飞机正在被研发。因此,进入使用的飞机将会超过美国联邦航空局(faa)和国外其他航空当局制定的针对一或两个飞行员的飞行时间限制的规定。
[0002]
添加另一名机组飞行员来覆盖额外的飞行时间会涉及对双人布局的驾驶舱的修改。在已经提供了额外座椅的情况下,它们通常是远离飞行控制设备的较小的翻转式座椅,比完整的飞行员座椅或乘客座椅要小,并且没有设计为被长时间占用。
[0003]
额外的飞行机组人员可以容纳在主舱中以在飞行中休息。然而,这将减少可用于获得收入的服务的空间。此外,第三名机组人员会增加成本并进一步减少收入。
[0004]
因此,需要一种操作和设备解决方案以有效且安全地驾驶远程飞机。
技术实现要素:
[0005]
为了获得前述和其它优点,本文公开的发明方面涉及一种用于对飞机进行机上驾驶和远程驾驶的系统,所述飞机上具有至少一个机组飞行员。所述系统包括飞机,其具有机载第一飞行员座椅、机载传感器、机载致动器和机载飞行控制系统,所述机载飞行控制系统包括安装在第一飞行员座椅附近的机载状态指示器和机载飞行控制设备。远程飞行控制系统通过包括至少一个无线网段的双向通信信道与机载飞行控制系统进行电子通信。所述远程飞行控制系统包括远程飞行控制设备和远程状态指示器。机载飞行控制系统操作用于从机载传感器接收与状态相关的输入,以根据接收到的与状态相关的输入来启动机载状态指示器,并且:至少在机上驾驶模式下,根据机载飞行控制设备致动机载致动器,从而对飞机进行机上驾驶;以及至少在远程驾驶模式下,将与状态相关的信号发送到远程飞行控制系统,从远程飞行控制系统接收飞行控制信号,并根据从远程飞行控制系统接收的飞行控制信号致动机载致动器,从而对飞机进行远程驾驶。
[0006]
在一些实施例中,第一飞行员座椅能够在竖直位置和后倾位置之间调节,并且当第一飞行员座椅调节到后倾位置时,机载飞行控制系统在远程驾驶模式下操作。
[0007]
在一些实施例中,飞机还包括能够在竖直位置和后倾位置之间调节的机载第二飞行员座椅。当第二飞行员座椅设置为处于后倾位置时,机载飞行控制系统在远程驾驶模式下操作。
[0008]
在一些实施例中,第一飞行员座椅设置为处于后倾位置时,第二飞行员座椅设置为仅在排他的其它时间处于后倾位置。
[0009]
在一些实施例中,远程飞行控制系统包括至少一个显示器,在该至少一个显示器上以图形方式显示远程状态指示器。
[0010]
在一些实施例中,飞机还包括能够在竖直位置和后倾位置之间调节的机载第二飞行员座椅,其中,第一飞行员座椅能够在竖直位置和后倾位置之间调节,并且其中飞机还包
括在第一飞行员座椅和第二飞行员座椅之间可展开的分隔壁。
[0011]
在一些实施例中,当第一飞行员座椅和第二飞行员座椅中的任一个从后倾位置调节至竖直位置时,分隔壁自动地收起。
[0012]
在一些实施例中,飞机还包括机载第二飞行员座椅,其中,至少在远程驾驶模式下,远程飞行员通过在第二飞行员座椅处可观看的虚拟现实(vr)呈现模拟为置身于所述飞机中。
[0013]
在一些实施例中,飞机还包括机载第二飞行员座椅,并且远程驾驶系统用于当远程飞行控制系统处的第三飞行员与第一飞行员和第二飞行员中的未休息者协同驾驶飞机时,通过允许第一飞行员座椅中的第一飞行员和第二飞行员座椅中的第二飞行员交替休息来扩展飞机的航程。
[0014]
在一些实施例中,第一飞行员座椅包括与机载飞行控制系统电子通信的座椅位置传感器,并且机载飞行控制系统操作用于在机组飞行员座椅被调节到后倾位置时提醒远程飞行控制系统。
[0015]
在另一方面中,本文公开的发明构思涉及一种用于机上驾驶和远程驾驶的飞机。所述飞机包括机载第一飞行员座椅、多个机载传感器、多个机载致动器和机载飞行控制系统,所述机载飞行控制系统包括安装在第一飞行员座椅附近的机载飞行控制设备和机载状态指示器。机载飞行控制系统通过包括至少一个无线网段的双向通信信道与远程飞行控制系统进行电子通信。远程飞行控制系统包括远程飞行控制设备和远程状态指示器。机载飞行控制系统操作用于从机载传感器接收与状态相关的输入,以根据接收到的与状态相关的输入来启动机载状态指示器,并且至少在机上驾驶模式下,根据机载飞行控制设备致动机载致动器,从而对飞机进行机上驾驶。机载飞行控制系统操作用于至少在远程驾驶模式下,将与状态相关的信号发送到远程飞行控制系统,从远程飞行控制系统接收飞行控制信号,并根据从远程飞行控制系统接收的飞行控制信号致动机载致动器,从而对飞机进行远程驾驶。
[0016]
在一些实施例中,第一飞行员座椅能够在竖直位置和后倾位置之间调节,并且,当第一飞行员座椅被调节到后倾位置时,机载飞行控制系统在远程驾驶模式下操作。
[0017]
在一些实施例中,机载第二飞行员座椅能够在竖直位置和后倾位置之间调节,并且,当第二飞行员座椅处于后倾位置时,机载飞行控制系统在远程驾驶模式下操作。
[0018]
在一些实施例中,第一飞行员座椅设置为处于后倾位置时,第二飞行员座椅设置为仅在排他的其它时间处于后倾位置。
[0019]
在一些实施例中,机载第二飞行员座椅能够在竖直位置和后倾位置之间调节,第一飞行员座椅能够在竖直位置和后倾位置之间调节,并且飞机还包括在第一飞行员座椅和第二飞行员座椅之间可展开的分隔壁。
[0020]
在一些实施例中,当第一飞行员座椅和第二飞行员座椅中的任一个从后倾位置被调节至竖直位置时,分隔壁自动地收起。
[0021]
在一些实施例中,飞机包括机载第二飞行员座椅,并且至少在远程驾驶模式下,远程飞行员通过在第二飞行员座椅处可观看的虚拟现实(vr)呈现模拟为置身于飞机中。
[0022]
在一些实施例中,飞机包括机载第二飞行员座椅,远程驾驶系统用于当远程飞行控制系统处的第三飞行员与第一飞行员和第二飞行员中的未休息者协同驾驶飞机时,通过
允许第一飞行员座椅中的第一飞行员和第二飞行员座椅中的第二飞行员交替休息来扩展飞机的航程。
[0023]
在一些实施例中,第一飞行员座椅包括与机载飞行控制系统电子通信的座椅位置传感器,并且其中,机载飞行控制系统操作用于在机组飞行员座椅调节到后倾位置时提醒所述飞行控制系统。
[0024]
在一些实施例中,第一飞行员座椅包括能够从竖直位置枢转地调节到完全倾斜的大致水平位置的靠背。
[0025]
发明构思的实施例可以包括以上方面、特征和配置中的一个或更多个或者任意组合。
附图说明
[0026]
当结合下面的详细描述时,可以更好地理解本文公开的发明构思的实施。这样的描述参考了附图,这些附图不一定按比例绘制,并且为了清楚起见,其中一些特征可能被夸大,并且一些特征可能被省略或可以被示意性地表示。附图中相似的附图标记可以表示并指代相同或相似的元件、特征或功能。在这些附图中:
[0027]
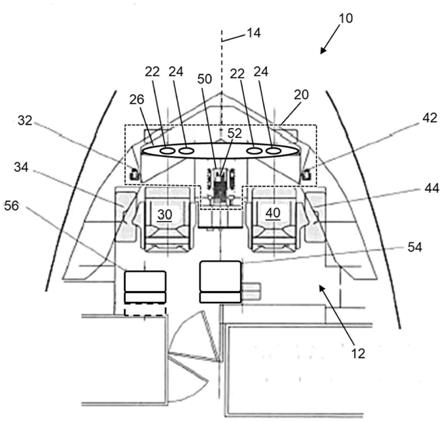
图1是根据本公开的飞机的双飞行员驾驶舱布局的平面图。
[0028]
图2是如图1所示的或在另一飞机中的双飞行员飞机驾驶舱的透视图,其中示出为处于正常飞行操作;
[0029]
图3是图2的双飞行员驾驶舱的透视图,其中示出为飞行员在遮蔽的隐私区域中在后倾的座椅上休息;
[0030]
图4是图3的休息的飞行员、后倾座椅和遮蔽的隐私区域的放大图;
[0031]
图5是图2-4的飞机的图示,其为了更完整地图解说明机载飞行控制系统部件、特别是通过机身和机翼分布的元件而示出;
[0032]
图6是系统的透视图,在该系统中,例如当一名飞行员休息时,地面飞行员担当图3-4的飞机的副飞行员角色。
具体实施方式
[0033]
以下结合附图阐述的描述旨在作为对所公开主题的各种示意性实施例的描述。结合每个示意性实施例描述了特定特征和功能。然而,对于本领域技术人员显而易见的是,可以在没有那些特定特征和功能中的每一个的情况下实践所公开的实施例。除明确说明,或方面、特征或功能与实施例不兼容以外,以下结合一个实施例描述的方面、特征和功能旨在适用于以下描述的其他实施例。
[0034]
提供了一种操作和设备解决方案以有效且安全地驾驶远程飞机。为了解决这个问题,例如通过远程地面飞行员来远程驾驶飞机。例如,当两名机组飞行员之一休息时,远程飞行员可以担任副飞行员的角色,而机上清醒的飞行员则担任主飞行员角色。实际上,第三名飞行员能够与机组人员合作来远距离驾驶飞机,使得一次可以休息一个机组飞行员。即使在一名机组飞行员休息时,两名人员(机组飞行员和远程飞行员)仍在控制飞机。机组飞行员座椅可以被配置为类似头等舱座椅,使得座椅可以后倾甚至到完全倾斜或平躺的状态以实现真正的睡眠。这样的座椅将在与现有座椅类似的空间中达到完全倾斜的状态,因此
几乎不需要重新设计驾驶舱。
[0035]
参考图1,具有双飞行员驾驶舱12的飞机10被示出为具有纵向对齐并彼此间隔开的两个飞行员座椅,每个飞行员座椅分别位于飞机的中心纵向轴线14的相应侧上。虚线强调了机载飞行控制系统20的飞行员可接近的前部组件。飞行控制系统20包括飞行状态指示器22(图1、5),飞机系统状态指示器24和供飞行员使用以控制飞机的飞行控制设备。飞行控制系统包括在飞行员座椅前方的仪表板26,许多状态指示器和飞行控制设备安装在该仪表板上以便使飞行员容易接近。飞行控制系统可以具有在驾驶舱和飞机内其他地方布置和分布的元件。
[0036]
飞行仪表和系统控制中的冗余度允许任一飞行员控制飞机。按照惯例,通常将第一或左侧飞行员座椅30分配给机长,并且通常将第二或右侧飞行员座椅40分配给副驾驶。随着飞行的进行,两名机组飞行员承担的角色可以在他们共同控制飞机的过程中互换和共享。因此,在附图和以下描述中提及的第一飞行员座椅30和第二飞行员座椅40没有限制任何飞行员在任何时间及任何座椅下所承担的角色,例如主飞行员或副飞行员。
[0037]
机长侧操纵杆32、机长导航袋34、副驾驶侧操纵杆42和副驾驶导航袋44相应地分配在飞行员座椅布置的左侧和右侧。在飞行员座椅之间的中心基座50用作底座,基于该基座第一飞行员36和第二飞行员46(图2)可接近并共享可致动推力控制器和其他机载飞行控制设备52。在这些描述中,飞行控制设备52被广泛地理解为包括操纵杆32和42以及调节飞机的速度、朝向、轨迹和用来调节和控制飞行的其他参数的其他装置。
[0038]
在驾驶舱12中提供的附加座椅可以是机舱乘务员座椅(cas)类型,这意味着第三乘员座椅54和第四乘员座椅56小于飞行员座椅,并且不是或仅是最小可调整和后倾的。在基座50后面或后方的第三乘员座椅54提供了对飞行板26的高可见度以用于观察。
[0039]
在图2中,示出了在正常飞行操作期间的双飞行员驾驶舱12,其中清醒的第一飞行员36占据第一飞行员座椅30,清醒的第二飞行员46占据第二飞行员座椅40。图2所示的飞机20可以与图1所示的飞机是相同的型号,或其他飞机。因此,图1中所示的飞机是非限制性示例。两名飞行员(图2)在这种模式下协同控制飞机10。飞行的距离和相应的持续时间可能会超过飞行员的舒适度或规定限制,因此可能需要相应的休息。在某些航空辖区中,飞行员每天的最长飞行时间受到规定的限制,例如九小时,并且晚上为八小时。累计休息时间和清醒时间的飞行值勤时限可能会更高,例如从9到14个小时,取决于飞行的航段数和飞行员值勤日的开始时间。
[0040]
为了给机组飞行员提供休息时间,根据这些描述,飞行员座椅可以例如从供清醒的飞行员使用的直立位置(图2)经过一系列后倾位置倾斜到如图3中对于第一飞行员座椅30所示的完全倾斜或平躺位置以实现真正的睡眠,在图3中,第一飞行员36处于躺卧姿态。因此,座椅30的靠背部分37从其图2的直立位置枢转地降低(图4),并且在图4中座椅的腿托部分38从图2的前倾位置枢转地升高。座椅底部39可随着靠背的运动而铰接以避免约束或卡顿。在完全倾斜或平躺位置中,靠背枢转地降低到水平位置,大约与座椅底部平齐,而腿托枢转地升高。
[0041]
图3和图4示出了在第一飞行员座椅30和第二飞行员座椅之间部署的分隔壁60,向休息的飞行员提供了遮蔽的私密性。当任一飞行员座椅后倾时,例如至完全倾斜位置,分隔壁60手动或自动地展开。当任一后倾的飞行员座椅返回到其直立位置时,分隔壁60手动或
自动地收起。在收起状态下,分隔壁60离散地收纳在紧凑的低轮廓构造或位置中。分隔壁60可以是存放在卷筒或卷轴上的薄的可滚动屏或薄板。其他壁结构落在这些描述的范围内。
[0042]
第一飞行员座椅30上的飞行机组人员可以休息以遵守航空局或航空公司设定的最大飞行时限;或者,机组人员可以根据个人选择进行休息。后倾的飞行员座椅在驾驶舱12尺寸内的空间中达到其完全倾斜的位置,并且分隔壁60为第一飞行员座椅30中的休息乘员提供了私密性,同时在图3-4的展开状态下和图2的收起状态下都只占据很小的空间。
[0043]
图5更完整地示出了图2-4的飞机10,以强调通过机身62和机翼64分布的机载飞行控制系统组件的元素。飞机包括机载传感器66、机载致动器68和机载飞行控制系统20。作为非限制性示例,机载传感器66可以包括飞行状态传感器,其中飞行状态传感器包括空气速度传感器、高度传感器、温度传感器以及检测飞机10内部和外部飞行状态的其他传感器。机载传感器66还可以包括飞机系统状态传感器,其中飞机系统状态传感器包括发动机状态传感器、燃油液位传感器,检测机翼襟翼和起落架状态的传感器以及其他传感器。
[0044]
作为非限制性示例,机载致动器68可以包括调节飞行控制表面的致动器,所述飞行控制表面例如是机翼襟翼、垂直稳定舵和水平稳定舵。机载致动器68还包括致动器,通过该致动器来控制飞机10的飞行和地面运动。因此,机载致动器68可以控制起落架以及地面和空气制动系统。机载致动器68还可包括控制发动机速度和推力的装置。因此,飞机10通过控制机载致动器68而被驾驶。致动器被广泛地引用为包括机械、电和流体驱动装置和机构。
[0045]
机载飞行控制系统70与机载传感器66进行操作性通信,以从机载传感器66接收与状态相关的输入,并根据接收到的与状态相关的输入来启动机载状态指示器。由于机载传感器66包括飞行状态传感器和飞机系统状态传感器,因此机载状态传感器相应地包括分别向飞行机组人员指示飞行和系统状态的飞行状态指示器22(图1和5)和飞机系统状态指示器24。机载飞行控制系统20与机载致动器68进行操作性通信,以根据机载飞行控制设备52控制和致动机载致动器68,从而对飞机实现机上驾驶。图5中大致示出的虚线为链路72,机载飞行控制系统20通过该链路与机载传感器66和机载致动器68进行操作性通信,该链路被广泛地认为包括电、机械、流体和光学链路,机载传感器通过这些链路向机载飞行控制系统20提供输入并且机载致动器通过这些链路接收来自机载飞行控制系统20的输出。机载传感器66、致动器68和它们之间的链路72以及机载飞行控制系统20可以具有冗余度,以在冗余并行设备和系统中的一个设备或一个系统不可操作或出现故障的情况下,确保飞行控制操作。
[0046]
驾驶通常由至少一名机组飞行员进行。机载飞行控制系统20用于接收来自机载传感器66的与状态相关的输入,以根据接收到的与状态相关的输入来启动机载状态指示器,并且在机上驾驶模式下,根据机载飞行控制设备致动机载致动器68,从而对飞机10进行机上驾驶。飞机10的控制不一定由两名机组飞行员中的一位飞行员唯一地执行,他们可以在机上驾驶模式下共同控制飞机。
[0047]
现在可以描述飞机10的机上驾驶和远程驾驶的系统70(图6)的方面,其优点从图3-4来看特别有益,其中飞行员36在完全倾斜的飞行员座椅30中休息。参照图6,远程飞行控制系统80用于与至少一个机上清醒的飞行员协同驾驶飞机10。远程飞行控制系统80通过包括至少一个无线网段的双向通信信道与机载飞行控制系统20进行电子通信。
[0048]
例如在图6中,远程飞行控制系统80通过路基第一链路92在第一双向通信信道90
中链接到陆空收发器94,其通过第一双向通信信道90的无线网段98在远程飞行控制系统80和飞机10之间传送双向通信96。此外,在图6所示的代表非限制性示例的系统70中,远程飞行控制系统80通过路基第二链路102在第二双向通信信道100中链接到陆-卫星收发器104,该陆-卫星收发器通过第二双向通信信道100的无线网段108在远程飞行控制系统80和通信卫星110之间传送双向通信106。通信卫星110还通过第二双向通信信道100的无线网段112与飞机进行双向通信。
[0049]
通过第一双向通信信道90和第二双向通信信道100中的一个或两个,或者通过未明确示出但由这些非限制性示例暗示的布置,机载驾驶系统70至少在远程驾驶模式下,将与状态相关的信号发送到远程飞行控制系统80,并从远程飞行控制系统接收飞行控制信号。
[0050]
所示的远程飞行控制系统80包括诸如led和/或lcd显示器之类的显示器120,计算机系统140在其上以图形方式显示飞行状态指示器和飞机系统状态指示器。远程飞行控制系统80包括输入设备,远程飞行控制系统通过该输入设备或根据其生成飞行控制信号并将飞行控制信号传输至机载飞行控制系统。作为非限制性示例,输入设备可以包括例如在一些实施例中为鼠标形式的操纵杆122、一个或更多个键盘124以及一个或更多个触摸屏。远程飞行控制系统80可以包括音频输出和音频输入设备,远程飞行员能够通过该音频输出和音频输入设备与机组飞行员和/或如图6中的飞行控制塔130代表的陆基飞行控制器保持音频通信,例如语音通信。
[0051]
例如,通过显示器120,远程飞行控制系统80包括或显示飞行状态指示器、飞机系统状态指示器和飞行控制设备,供远程飞行员用于远程驾驶飞机。远程飞行控制系统80包括由显示器120表示的仪表板,其上以图形表示或安装有许多状态指示器和飞行控制设备,以便于远程飞行员136使用。在所示的非限制性示例中,远程飞行控制系统80以图形方式显示飞行状态指示器和飞机系统状态指示器,其分别指示如所接收的与状态相关的信号传达的飞行状态和系统状态。其他布置也在这些描述的范围内,图6的远程飞行控制系统80通常是基于计算机的,并且因此包括计算机系统140,例如工作站、服务器或pc。
[0052]
输入设备,例如鼠标或其他输入设备形式的操纵杆122,用作远程飞行控制设备,通过该远程飞行控制设备可以对飞机10进行远程驾驶。远程飞行控制系统80例如可以向远程飞行员136提供机组飞行员可用的任何和所有信息。因此,通过利用显示器120和远程飞行控制系统80的其他益处,向远程飞行员136呈现了模拟或远程驾驶舱和飞行展现。
[0053]
当机组飞行员之一休息时,可选地由如图4所示分隔壁遮挡,远程第三飞行员可以承担驾驶角色,特别是在非限制性示例中充当副飞行员。远程飞行员136可以在远程飞行控制系统80处通过使用驾驶舱内的相应虚拟现实(vr)呈现来模拟为置身于飞机10的驾驶舱12中。例如,在远程飞行控制系统80中的显示器120可向远程飞行员136显示机上清醒的飞行员。例如,根据图3-4,当第一飞行员36休息时,第二飞行员46可显示在远程飞行控制系统80中。类似地,驾驶舱12和机载飞行控制系统20处的显示器可以将远程飞行员136显示给清醒的机组飞行员。例如,可以在一个或每个位置处使用vr头枕显示器。因此,每个清醒的机载和远程飞行员都可以通过vr呈现感知到另一个飞行员。
[0054]
因此,在各种非限制性示例中,系统70设置为用于机上驾驶和远程驾驶其上具有至少一个机组飞行员的飞机10。在典型示例中,飞机具有两个机组飞行员,当清醒的机组飞
行员由远程飞行员通过远程飞行控制系统80辅助时,其中的一个飞行员可以休息。机载飞行控制系统20可操作以接收来自机载传感器66的与状态相关的输入,以根据接收到的与状态相关的输入来启动机载状态指示器。
[0055]
机载飞行控制系统20可以具有机上驾驶模式和远程驾驶模式,在机上驾驶模式下,机载致动器根据机载飞行控制设备被致动,从而对飞机进行机上驾驶。至少在远程驾驶模式下,机载飞行控制系统20将来自机载传感器66的与状态相关的信号发送到远程飞行控制系统80,并从远程飞行控制系统80接收飞行控制信号。机载飞行控制系统20可以根据从远程飞行控制系统80接收的飞行控制信号来致动机载致动器68,从而远程驾驶飞机10。
[0056]
可以在机载第一飞行员座椅30或第二飞行员座椅40调整到完全倾斜位置时(指示机组飞行员处于休息状态)进入远程驾驶模式。每个机组飞行员座椅可以包括与机载飞行控制系统20电子通信的相应的座椅位置传感器58(图4),当机组飞行员座椅被调节到后倾位置时,机载飞行控制系统可操作以通知远程飞行控制系统80。当机组飞行员座椅中的任一个被调节到后倾位置、例如完全倾斜位置时,机载飞行控制系统20可以在远程驾驶模式下自动操作。
[0057]
为了确保一个机组飞行员在竖直的飞行员座椅上处于清醒状态,可以将第一飞行员座椅30设置为处于其后倾位置,并且在排他的其它时间中将第二飞行员座椅40设置为处于其后倾位置。第一飞行员座椅30和第二飞行员座椅40都后倾可能会引起警告行为或警报。通过使用可控的调节器或锁止件,例如通过机载飞行控制系统20或座椅的相互连接的机构,通过对座椅枢轴的交互和控制,可以防止第一飞行员座椅30和第二飞行员座椅40同时后倾或完全倾斜。
[0058]
在远程驾驶模式下,第三飞行员136可以与机组第一飞行员36和第二飞行员46中未休息的飞行员协同驾驶飞机10。当机载第一飞行员座椅30和第二飞行员座椅40都返回其直立位置时,机载飞行控制系统20可以自动返回到机上驾驶模式。因此,使任一机载飞行员座椅后倾可以自动将机载飞行控制系统20从机上驾驶模式切换到远程驾驶模式,并且将后倾的机载座椅返回到其直立位置可以自动将机载飞行控制系统切换到机上驾驶模式。
[0059]
机载传感器66经由机载飞行控制系统20和一个或更多个通信信道(90、100)将信息中继到远程飞行控制系统80的计算机系统140,该计算机系统具有处理器,在该处理器中使用软件来分析接收到的数据以确认并指示飞行状态和飞机系统状态。处理器可以是服务器的部件,例如数字计算机,其还包括输入/输出(i/o)接口、网络接口、数据存储器和内存。这些部件可以经由诸如一个或更多个总线或其他有线或无线连接的本地接口通信地耦合。本地接口可以具有其他元件,例如控制器、缓冲区(缓存)、驱动器、转发器和接收器等,以实现通信。此外,本地接口可以包括地址、控制和/或数据连接以实现部件之间的适当通信。
[0060]
计算机系统140的处理器执行软件指令,并且可以是任何定制或商用处理器、中央处理器(cpu)、与服务器相关联的几个处理器中的辅助处理器、基于半导体的微处理器(以微芯片或芯片组的形式),或通常用于执行软件指令的任何设备。在操作中,处理器被配置为执行存储在存储器中的软件,以与存储器进行数据通信,并且通常根据软件指令来控制服务器的操作。i/o接口可以用于从一个或更多个设备或部件(例如显示器、如图6中的飞行控制塔130所表示的飞机网络、和机组人员可接近的设备)接收用户输入和/或用于向一个或更多个设备或部件提供系统输出。i/o接口可能包括串行端口、并行端口、小型计算机系
统接口(scsi)、串行ata(sata)、光纤通道、无限带宽(infiniband)、iscsi、pci express接口(pci-x)、红外(ir)接口、射频(rf)接口和/或通用串行总线(usb)接口。
[0061]
网络接口可用于使计算机系统140能够在诸如因特网、广域网(wan),诸如安全飞机网络之类的局域网(lan)等网络上进行通信。网络接口可以包括地址、控制、和/或数据连接以实现网络上的适当通信。数据存储器可用于存储数据。数据存储器可以包括任何易失性存储元件(例如,随机存取存储器(ram,例如dram、sram、sdram等))、非易失性存储元件(例如,rom、硬盘驱动器、磁带、cdrom等)及其组合。此外,数据存储器可以包含电子、磁性、光学和/或其他类型的存储介质。在一个示例中,数据存储器可以位于服务器内部,例如连接到服务器本地接口的内部硬盘驱动器。另外,在另一个实施例中,数据存储器可以位于服务器外部,例如连接到i/o接口(例如,scsi或usb连接)的外部硬盘驱动器。在另一个实施例中,数据存储器可以通过网络连接到服务器,例如,网络附加文件服务器。
[0062]
存储器可以包括任何易失性存储元件(例如,随机存取存储器(ram,例如dram、sram、sdram等))、非易失性存储元件(例如,rom、硬盘驱动器、磁带、cdrom等)及其组合。此外,存储器可以包含电子、磁性、光学和/或其他类型的存储介质。存储器中的软件可以包括一个或更多个软件程序,每个软件程序包括用于实施逻辑功能的可执行指令的有序列表。存储器中的软件包括合适的操作系统(o/s)和一个或更多个程序。操作系统实质上控制其他计算机程序(例如一个或更多个程序)的执行,并提供计划、输入输出控制、文件和数据管理、内存管理以及通信控制和相关服务。一个或更多个程序可以被配置为实现本文描述的各种过程、算法、方法、技术等。
[0063]
为了实现可靠性和直接连接,可以使用军事通信协议,例如用于控制无人机(uav)的协议,并被引导到远程飞行控制系统80和远程飞行员136。虽然服务于民用的航空系统,系统的用于以高安全性远程驾驶飞机10的通信协议可以是军事级的。飞机的远程飞行控制可用于针对驾驶舱冒烟、低氧或其他健康问题来提高飞行安全性。发生恐怖事件时,可以使用飞机10的远程飞行控制。具有改进的安全性以及通过一个或更多个远程飞行员实现的机组人员冗余度的系统可以满足标准的扩展双发操作(etop),所述标准的扩展双发操作描述了一种操作,其中,航空公司可以在机场和着陆区稀疏的扩展距离范围(例如,远洋航线)下飞行。
[0064]
系统70能够增加远程飞机的有效航程,而无需对机舱机载设置进行重大改变。在能够远程飞行例如十小时或更长时间的飞机上使用时,根据航空法规或航空公司标准,系统70能够用于按照一天中飞行员的最大飞行时间来减轻机上机组人员的负担。这意味着以前通过非直接路线连接的点对点机场对现在可以在单个航班中直接连接。例如,达拉斯沃思堡机场和法兰克福机场可以直接连接,而以前只有美国东海岸和欧洲的限制地点之间的航班是由商业旅客航空公司运营的。
[0065]
虽然前面的描述仅通过示例的方式提供了本发明的实施例,但是可以预见,其他实施例可以实现相似的功能和/或获得相似的结果。任何和所有这样的等同实施例和示例都在本发明的范围内,并且旨在由所附权利要求书涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1