电动动力系统架构和使用该架构的容错VTOL飞行器的制作方法
电动动力系统架构和使用该架构的容错vtol飞行器
[0001]
相关申请的交叉引用
[0002]
本申请要求贝维尔特等人在2018年5月31日提交的美国临时专利申请第62/678,275号的优先权,该临时专利申请据此通过引用以其整体并入。
发明领域
[0003]
本发明涉及电动驱动的飞行,即用于飞行器械(aerial vehicles)上使用的电动马达的动力系统。
[0004]
附图简述
[0005]
图1a-图1d是根据本发明的一些实施例的处于悬停构型的vtol飞行器。
[0006]
图1e-图1h是根据本发明的一些实施例的处于向前飞行构型的vtol飞行器。
[0007]
图1e-图1h是根据本发明的一些实施例的从向前飞行构型过渡到垂直起飞和着陆构型的vtol飞行器。
[0008]
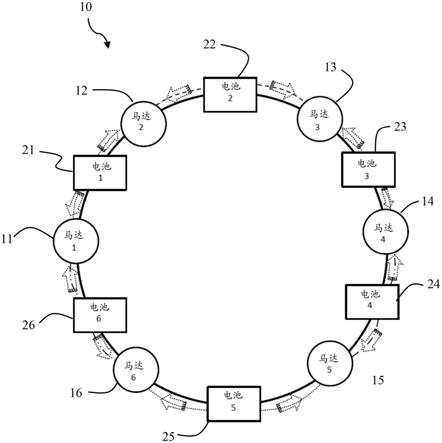
图2a是根据本发明的一些实施例的具有环形架构的飞行系统的布局。
[0009]
图2b是根据本发明的一些实施例的标识用于环形架构的马达位置的布局。
[0010]
图2c是根据本发明的一些实施例的电池位置的布局。
[0011]
图3是根据本发明的一些实施例的马达功率图。
[0012]
图4是根据本发明的一些实施例的故障场景布局。
[0013]
图5是根据本发明的一些实施例的故障补偿布局。
[0014]
图6是根据本发明的一些实施例的故障补偿布局。
[0015]
图7是根据本发明的一些实施例的电源架构布局。
[0016]
图8是根据本发明的一些实施例的电池放电图。
[0017]
图9是根据本发明的一些实施例的飞行控制系统架构布局。
[0018]
图10图示了根据本发明的一些实施例的飞行控制软件架构。
[0019]
图11a是根据本发明的一些实施例的具有双重架构的飞行动力系统的布局。
[0020]
图11b是根据本发明的一些实施例的具有双重架构的飞行动力系统的布局。
[0021]
图11c是根据本发明的一些实施例的具有带马达故障的双重架构的飞行动力系统的布局。
[0022]
图11d是根据本发明的一些实施例的具有带电池故障的双重架构的飞行动力系统的布局。
[0023]
图12是根据本发明的一些实施例的具有六芒星形架构(hexagram architecture)的飞行动力系统的布局。
[0024]
图13是根据本发明的一些实施例的具有星形架构的飞行动力系统的布局。
[0025]
图14是根据本发明的一些实施例的具有网状架构的飞行动力系统的布局。
[0026]
图15a-图15c表示根据本发明一些实施例的关于电池故障运行的信息。
[0027]
概述
[0028]
一种适合在飞行器械中使用,具有用于电动马达的增强可靠性的动力系统架构的
动力系统。例如,在具有六个或更多个马达的系统中,单独的电池可以用于给两个或更多个马达的子集供电。每个马达可以由电池的两个或更多个子集供电,从而允许缓解马达故障。每个马达可以具有两组或更多组绕组,其中每个绕组由不同的电池供电。在向前飞行模式或垂直起飞和着陆模式中,在出现故障的绕组、故障的电池或故障的马达的情况下,动力线路可以被自动改变以继续进行正确的姿态控制,并提供足够的推力。在出现故障的马达的情况下,偏离故障的马达的第二马达可以断电,以便于姿态控制。
[0029]
详细描述
[0030]
在一些方面中,飞行器械可以使用由电动马达驱动的叶片螺旋桨(bladed propeller),以在起飞期间提供推力。螺旋桨/马达单元可以被称为推进组件。在一些方面中,飞行器械的机翼可以旋转,其中前缘(leading edge)面向上,使得螺旋桨为起飞和着陆提供垂直推力。在一些方面中,机翼上的马达驱动的螺旋桨单元本身可以相对于固定机翼旋转,使得螺旋桨为起飞和着陆提供垂直推力。马达驱动的螺旋桨单元的旋转可以通过旋转螺旋桨和电动马达两者来允许推力的方向改变,因此不需要围绕旋转接头或通过旋转接头进行扭矩驱动的任何万向接头(gimbaling),或者其他方法。
[0031]
在一些方面中,根据本发明的实施例的飞行器械从地面起飞,其中垂直推力来自已经部署成垂直构型的旋翼组件(rotor assemblies)。随着飞行器械开始获得飞行高度(altitude),旋翼组件可以开始向前倾斜,以便开始向前加速。随着飞行器械获得向前的速度,机翼上方的气流产生了升力,使得旋翼变得不太重要,并且然后不需要使用垂直推力来保持飞行高度。一旦飞行器械已经达到足够的向前的速度,用于在起飞期间提供垂直推力的叶片中的一些或全部可以沿着它们的短舱(nacelle)收起。在一些方面中,也在向前飞行期间使用用于垂直起飞和着陆的所有推进组件。支撑推进组件的短舱可以具有凹部,使得叶片可以嵌套在凹部中,从而大大减小脱离的旋翼组件的阻力。
[0032]
起飞后,飞行器械将通过将螺旋桨从垂直推力定向铰接成包括水平推力元件的位置来开始过渡到向前飞行。随着飞行器械开始以一定速度向前移动,升力将由机翼产生,因此对来自旋翼的垂直推力需求更少。当螺旋桨进一步朝向向前飞行、水平推力构型铰接时,飞行器械获得更多的速度。
[0033]
在根据本发明的一些实施例的第一垂直构型中,如图1a至图1d中的垂直起飞构型中看出的,飞行器械200使用固定机翼202、203,该固定机翼202、203可以是前掠机翼,其具有适合于垂直起飞和着陆以及适合于向前飞行两者的相同或不同类型的推进组件。在这种构型中,推进组件定位成用于垂直推动。飞行器机体201支撑左机翼202和右机翼203。沿着机翼的马达驱动的旋翼组件206可以包括电动马达和螺旋桨,旋翼组件206适于利用可以驻留于短舱主体中的部署机构从向前飞行构型铰接成垂直构型,并且当所有或大部分的短舱保持在附接到机翼的适当位置中时部署马达和螺旋桨。在一些方面中,螺旋桨叶片可以收起和嵌套到短舱主体中。机翼尖端处的马达驱动的旋翼组件207可以沿着枢轴轴线从向前飞行构型部署成垂直起飞和着陆构成,其中短舱和电动马达以及螺旋桨一致地部署。尽管每个机翼图示有一个中跨推进组件(mid-span propulsion assembly)和一个机翼尖端推进组件,但是在一些方面中,可以存在更多的中跨推进组件。
[0034]
飞行器机体201向后延伸,还附接到升高的后平衡器204。后平衡器具有附接到其的后推进组件205。在后平衡器的尖端处的马达驱动的旋翼组件207可以沿着枢轴轴线从向
前飞行构型部署成垂直起飞和着陆构型,其中短舱和电动马达以及螺旋桨一致地部署。
[0035]
如图1d中的俯视图中看出的,推进组件定位于距飞行器质心不同距离处的两个轴线上。垂直起飞和着陆期间的姿态控制可以通过改变每一处推进组件位置中的推力来操纵。在垂直起飞或着陆期间马达故障的情况下,并且尤其是在机翼外侧推进组件处的马达故障的情况下,飞行器的姿态可以通过实施本文描述的容错策略(fault tolerance strategies)来保持。
[0036]
可见飞行器械200具有并排的两个乘员座椅,以及机体201下方的起落架。尽管图示了两个乘员座椅,但是在本发明的不同实施例中可以容纳其他数量的乘员。
[0037]
图1e至图1h图示了处于向前飞行构型的飞行器械200。在这种构型中,推进组件被定位成在水平飞行期间提供向前的推力。如图1h中看出的,在向前飞行构型中,马达和螺旋桨的质心可能在机翼的前缘的前方。如图1g中看出的,后平衡器204上的推进组件205可以与机翼上的推进组件206、207处于不同的高度。在向前飞行期间马达故障的情况下,飞行器的姿态可以通过实施本文描述的容错策略来保持。
[0038]
在一些方面中,安装在机翼上的推进组件中的全部或一部分可以适于在向前飞行构型中使用,而其他安装在机翼上的螺旋桨可以适于在常规向前飞行期间完全收起。飞行器械200可以在右侧机翼203上具有两个推进组件并且在左侧机翼202上具有两个推进组件。每个机翼上的内侧推进组件可以具有安装在机翼上的旋翼206,该旋翼206适于向上翻转到用于垂直起飞和着陆的部署位置,在过渡到向前飞行期间朝向收起位置向后移动,并且然后在向前飞行期间使这些旋翼206的叶片收起并嵌套。外侧推进组件207可以从水平推力构型一致地枢转到垂直推力构型。
[0039]
类似地,每个后平衡器204可以具有安装到其的推进组件,这两个推进组件都适于在垂直起飞和着陆模式以及过渡模式期间使用。在一些方面中,所有的推进组件设计是相同的,其中子集与推进组件的主叶片一起用于向前飞行。在一些方面中,所有的推进组件设计是相同的,其中所有的螺旋桨用于向前飞行。在一些方面中,可以有不同数量的推进组件单元安装到后平衡器204。
[0040]
驱动安装在机翼上的推进组件206、207的马达和驱动安装在后平衡器上的推进组件的马达可以各自具有两组绕组。在一些方面中,两组绕组在飞行期间都通电。在一些方面中,马达的每个绕组由不同的电池电路供电。在一些方面中,每个马达可以具有多于两组的绕组。
[0041]
在一些实施例中,飞行器械的电动马达由可充电电池供电。在单个电池故障的情况下,使用驱动一个或更多个电源总线的多个电池增强了可靠性。在一些实施例中,电池驻留于器械主体内具有可调节位置的支架上,使得器械的平衡可以根据飞行员的重量进行调节。图10图示了根据本发明的一些实施例的用于六电池系统的电池位置布局。
[0042]
在一些实施例中,如图2a中看出的,用于电力驱动的垂直起飞和着陆飞行器的高可靠性动力系统10在环形架构中具有六个马达和六个电池。在该示例性配置中,有六个马达和六个电池。电池中的每一个向两个马达提供电力,并且每个马达从两个电池接收电力。图2b图示了使用六个推进组件和六个电池的示例性实施例中的vtol飞行器上的六个马达的布局。图2c图示了使用六个推进组件和六个电池的示例性实施例中的vtol飞行器中的六个电池的布局。在示例性的环形实施例中,有六个电池和六个马达。马达中的每一个由两个
独立的电池供电。电池的不同的位置30也增强了动力系统架构的可靠性和容错性。每个电池为两个独立的马达供电。在一些方面中,马达中的每一个缠绕有两组绕组,并且每组绕组从不同的电池接收电力。如下面参考图7所讨论的,六个电池中的每一个供应两个功率逆变器(power inverters)31,总共供应12个功率逆变器。电池的标称电压为600v。六个推进马达中的每一个具有两组绕组,其中每个马达由两个逆变器供电,每组绕组对应一个逆变器。为单个马达供电的两个逆变器各自由不同的电池供应电力。
[0043]
在示例性的六马达六电池实施例10中,第一马达11联接第六电池26和第一电池21。第二马达12联接到第一电池21和第二电池22。第三马达13联接到第二电池22和第三电池23。第四马达14联接到第三电池23和第四电池24。第五马达15联接到第四电池24和第五电池25。第六马达16联接到第五电池25和第六电池26。在标称运行场景下,每个电池在其联接到的两个马达之间平均拆分(split)其功率分布,并且每个马达从其联接到的每个电池接收等量的功率。
[0044]
根据本发明的实施例的动力系统架构的容错方面适于承受并响应于至少以下故障:电池的故障;马达的故障;或者马达逆变器的故障。
[0045]
图3是在六马达实施例中,单个马达40所需功率的条形图(具有用于每种运行模式的条形对)。蓝色竖条(在用于每种模式的条形对的左侧)图示了五个不同飞行阶段(即,悬停41、垂直上升42、垂直下降43、巡航爬升44和巡航45)的每个马达的标称(正常)运行功率。悬停、垂直上升和垂直下降模式是vtol模式,其中马达旋转到垂直推力位置,如图1a-图1d中看出的。巡航爬升和巡航阶段是其中马达处于向前飞行位置,如图1e-1h中看出的。红色竖条(在用于每种模式的条形对的右侧)表示紧急阶段运行,如下面讨论的。
[0046]
如图3中看出的,六马达六电池环形架构系统的说明性实施例在标称条件期间处于vtol模式下每个马达运行大约60kw。这60kw与约150kw的最大可用功率相比较。然而,在马达故障的情况下,更多的功率可以被转移到剩余的马达,以保持姿态控制和飞行高度控制,如下面进一步讨论的。
[0047]
图4图示了潜在故障模式60,其中第一马达发生故障。如在表示的马达布局中看出的,第一马达11的损失表示远港马达(far port motor)处的推力损失,这将对飞行器的姿态产生显著影响。飞行计算机可能会立即感知到至少两件事:第一,马达已经停止汲取电流;第二,发生对飞行器的姿态的干扰。为了保持飞行器中的平衡,飞行控制计算机将根据需要降低相对的马达的功率。在这个示例中,如图5中看出的,第四马达14的功率将被降低。由于两个马达的停机而导致的升力损失需要剩余四个马达采用更多的功率并输送更多的升力。图6图示了第二马达、第三马达、第五马达和第六马达中增加的负载需求是如何通过分布来自电池的更多功率来满足的。再看图3,红色竖条图示了马达故障以及因此相对的马达的马达停机时所需的功率输送。在一些方面中,第四马达的断电以及第二马达、第三马达、第五马达和第六马达的功率增加可以同时发生。在一些方面中,第四马达的断电以及第二马达、第三马达、第五马达和第六马达的功率增加可以按顺序发生。
[0048]
如图6中看出的,在第一马达11发生故障并且第四马达14断电以平衡飞行器的情况下,第一电池21现在仅向第二马达12输送功率。同样,第三电池仅向第三马达输送功率,第四电池仅向第五马达输送功率,并且第六电池仅向第六马达输送功率。第二电池向第二马达和第三马达两者输送功率,并且第五电池向第五马达和第六马达输送功率。尽管图示
为使第四马达运行降至0%功率,但是在一些方面中,相对的马达(cross motor)可以以低水平运行,例如在标称功率的0%-20%的范围内运行。由于第一电池和第六电池仅向单个马达提供功率,并且由于第三电池和第四电池主要仅向单个马达输送功率,所以这些电池将向第二马达、第三马达、第五马达和第六马达中它们各自的绕组提供更多的电流61。第二电池和第五电池将向它们相邻的马达之间平均拆分。在图6中图示的故障场景中,每个电池可能输出相同量的功率,但是两个电池拆分它们的功率输送,并且四个马达仅向单个马达提供(或基本上提供)功率。在这种紧急模式下,马达的增加的负载需求通过电池架构共享,以利用飞行器上的可用能量。虽然一个马达已经被禁用并且第二马达已经断电,以缓解姿态控制问题,但每个电池仍然在使用和输送功率。
[0049]
在一些实施例中,垂直起飞和着陆飞行器具有自主姿态控制系统,该自主姿态控制系统适于通过负载共享来承受多电池系统中的电源链路(power link)故障或完全马达故障,以更好地使电池放电水平相等。在一些方面中,每个马达在多个互补的绕组的组上被驱动,其中每个绕组的组使用不同的负载链路并由不同的电池驱动。图7是用于六马达六电池飞行器的电气系统电源架构的说明性实施例。六个电池201中的每一个供应两个功率逆变器,总共供应12个功率逆变器202。电池的标称电压为600v。六个推进马达203中的每一个具有两组绕组,其中每个马达由两个逆变器供电,每组绕组对应一个逆变器。为单个马达供电的两个逆变器各自由不同的电池供应电力。除了向马达逆变器供应电力之外,电池还向旋翼部署机构204(短舱倾斜致动器)供应电力,旋翼部署机构204用于在各种飞行模式(垂直起飞和着陆构型、向前飞行构型以及它们之间的过渡)期间部署和收起旋翼。
[0050]
飞行计算机205监控来自十二个马达逆变器202中的每一个的电流,这些马达逆变器202向六个马达203中的十二个绕组的组供应电力。飞行计算机205还可以控制供应给六个马达的12组绕组中的每一组的马达电流。在一些实施例中,电池201还向可变桨距螺旋桨206的叶片桨距马达和位置编码器供应电力。电池还向用于定位飞机上的各种控制表面的控制表面致动器207供应电力。叶片桨距马达和控制表面致动器207可以通过dc-dc转换器208接收电力运行,例如将电压从600v逐步降低到160v。一套航空电子设备209也可以联接到飞行计算机。电池充电器210可以用于向电池201充电,并且电池充电器可以在飞行器外部并且是基于地面的。
[0051]
在故障发生的情况下,诸如马达或马达的电源链路的故障,如上面所描述的,可以自主地并且在飞行器上完成对从各个电池到各个马达的功率分布的补偿。例如,补偿可以在不需要飞行员输入的情况下完成。
[0052]
在另一种故障场景下,马达上的单个绕组可能发生故障。在这样的场景下,相对的马达可以有所断电,同时具有唯一剩余绕组的马达可以有所加电(powered up)。由电池供应的功率可以被调制以平衡各个电池的放电。在又一种故障场景下,电池可能发生故障。在这种情况下,相对的马达可能被降低10%-20%,其中马达上剩余的唯一电池与故障的电池/逆变器一起提供额外的功率,并且沿着环的差分功率用于分散电池放电。在环形架构中的电池完全故障的情况下,这将导致两个马达各自具有一个未通电的绕组的组,相邻马达中的每一个中剩余的绕组的组将从该绕组的组的电池获取增加的功率,并且为了最佳地均衡电池放电速率,围绕环将有差分地调节的功率。相对的马达将部分地断电,以保持适当的放电速率。
[0053]
图8图示了四种飞行模式和用于每种飞行模式的电池放电速率的条形图235。条形图中的竖直轴线是电池放电速率c。电池放电速率是标准化系数,其中1c的放电速率将使电池在一个小时内放电。2c使电池在30分钟内放电,3c的放电速率将使电池在20分钟内放电,并且依此类推。最大峰值放电速率236(其在该示例性实施例中大约为5c)可以由电池化学性质的限制来设定。标称飞行模式是悬停232、过渡233和巡航234。巡航放电速率240可以约为1c。当飞行器接近着陆时,飞行器将改变到过渡模式233,该过渡模式可以具有约2c的过渡放电速率239。然后,当飞行器着陆时,飞行器将进入悬停模式232,该悬停模式可以具有约2.5c的放电速率。在马达故障的情况下,飞行器可以进入紧急悬停模式231,其中相对的马达可以被断电以实现姿态稳定性。悬停模式放电速率237可以超过3c。
[0054]
在示例性实施例中,最大总起飞重量(mgtow)可以是4200磅。放电速率超出地面效应(oge),此时所有电池的总储能为150kwh。在紧急悬停模式231中紧急着陆的情况下,使用紧急悬停放电速率237的高放电速率的预期时间约为1分钟。
[0055]
图9图示了根据本发明的一些实施例的用于高可靠性电动驱动的飞行器的飞行控制系统架构。在示例性实施例中,控制系统的飞行计算机111接收来自任务计算机112和飞行员113的飞行命令114。飞行计算机还可以接收来自飞行关键传感器套件110的输入。飞行关键传感器可能有三重冗余(triply redundant)。飞行计算机可能有三重冗余。该系统可以包括每个致动器115上的表决桥(voting bridge)116。图10图示了根据本发明的一些实施例的飞行控制软件架构。
[0056]
在本发明的一些实施例中,可以使用其他电池和马达架构,这进一步增强了系统的容错性。在一些方面中,如图11a中看出的,使用双重架构120,其使用四个电池用于六个推进组件的电动马达;左侧机翼尖端推进组件121、左侧机翼推进组件122、右侧机翼推进组件123、右侧机翼尖端推进组件124、左后推进组件125以及右后推进组件126。在双重架构中,每个电池向飞行器纵向中心线的每一侧上的一个或更多个马达提供电力。通过将向最远的外侧供电的电池链接到飞行器的中心线的另一侧上的马达,然后,电池故障使其在整个飞行器上的影响更加分散,从而减少由于电池故障而导致的姿态偏移的量。例如,在第一马达121处的马达故障的情况下,第四马达的功率仍然存在瞬时降低以补偿故障。但是,与上面公开的环形架构相比,在使用剩余马达的双重架构中用于功率共享的补偿机制将允许逆变器优化系统中的较低的逆变器负载。此外,与环形架构相比,在使用剩余马达的双重架构中用于功率共享的补偿机制将允许电池优化系统中的较低的电池负载。
[0057]
图11b图示了双重架构120的标称运行条件,其中四个电池111、112、113、114中的每一个向三个不同马达的一个绕组提供35kw,每个电池输送的总功率为105kw,并且每个马达接收的总功率为70kw,总输送功率为420kw。每个马达从三个电池接收功率。
[0058]
图11c图示了马达故障情况,在该示例性情况下,是左侧机翼尖端推进组件的马达121故障。如所图示的,为了抵消左侧机翼尖端马达的损失,右侧机翼尖端上的马达124已经断电并且不再汲取任何功率。电池中的每一个现在为两个(而不是以前的三个)马达供电,并且每个马达从两个电池接收功率,而不是以前的三个。电池中的每一个能够以相同的功率输出水平运行,并且马达绕组中的每一个及其相关联的逆变器也能够以相同的功率水平运行。
[0059]
图11d图示了电池故障情况,在该示例性情况下,是第一电池111故障。在这种情况
下,每个剩余的电池提供相同的功率输出水平,尽管不同的马达以不同的功率水平运行以便平衡飞行器纵向中心线的每一侧上产生的推力。
[0060]
图12图示了根据本发明的一些实施例的六电池六马达六芒星形架构200。在图12中图示的六芒星形架构中,六个电池中的每一个为两个马达供电,就像环形架构一样。并且每个马达由两个电池供电。然而,第一电池向第一马达和第三马达提供电力,第二电池向第二马达和第四马达提供电力,并且以此类推。六芒星形架构创造了两个独立的环,涵盖第一马达、第三马达和第六马达,以及第二马达、第四马达和第五马达。通过将向最远的外侧供电的电池链接到飞行器的中心线的另一侧上的马达,然后,电池故障使其在整个飞行器上的影响更加分散,从而减少由于电池故障而导致的姿态偏移的量。例如,在第一马达处的马达故障的情况下,第四马达的功率仍然存在瞬时降低以补偿故障。但是,与环形架构相比,在使用剩余马达的六芒星形架构中用于功率共享的补偿机制将允许逆变器优化系统中的较低的逆变器负载。此外,与环形结构相比,在使用剩余马达的六芒星形架构中用于功率共享的补偿机制将允许电池优化系统中的较低的电池负载。图16图示了在电池故障期间用于针对本文描述的各种马达-电池架构的逆变器优化、电池优化和马达优化的解决方案的逆变器、电池和马达中的最大负载。在图16中,六芒星形架构用符号指示,而不是像其他架构那样用名称指示。
[0061]
图13和图14图示了根据本发明的一些实施例的六马达四电池系统。图13图示了使用四个电池为六个马达供电的星形架构。每个电池联接到三个马达。图14图示了具有四个电池和六个马达的网状架构。
[0062]
图16a、图16b和图16c分别图示了在马达故障期间用于针对本文描述的各种马达-电池架构的逆变器优化、电池优化和马达优化的解决方案的逆变器、电池和马达中的最大负载。六芒星形架构用符号指示,而不是像其他架构那样用名称指示。如所图示的,六芒星形架构给出了当关于所有优化(逆变器优化的、电池优化的和马达优化的)进行评估时的最佳解决方案。
[0063]
如从上面描述中变得明显的,从本文给出的描述中可以配置各种各样的实施例,并且本领域技术人员将容易想到附加的优点和修改。因此,本发明在其更广泛的方面不限于所示出和描述的具体细节和说明性示例。本文描述的实施例可以包括物理结构以及使用方法。因此,在不脱离申请人的总体发明的精神或范围的情况下,可以偏离这样的细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1