飞行体的制作方法
1.本发明涉及一种飞行体,特别是涉及一种推力部和翼部可位移地连接的飞行体。
背景技术:
2.作为具备旋翼(旋转翼)和主翼的飞行器,已知所谓的倾转旋翼方式和倾转机翼方式这两种方式。
3.专利文献1公开了一种飞行器(倾转旋翼方式),其主翼固定在主体部上,包含马达的旋翼整体构成为能够在垂直方向和飞行方向的范围内位移。
4.另一方面,专利文献2公开了一种飞行器(倾转机翼方式),其主翼和主体部构成为能够在垂直方向和飞行方向的范围内位移,马达和旋翼整体固定在主翼上。
5.现有技术文献
6.专利文献
7.专利文献1:日本特表2013-501677号公报
8.专利文献2:日本特开2017-81360号公报
技术实现要素:
9.发明所要解决的课题
10.根据专利文献1的技术,在上升时主翼会进入螺旋桨尾流的大范围内,因此主翼的飞行效率较差。
11.根据专利文献2的技术,由于主翼整体位移,因此当受到风的阻力时会变得不稳定。
12.本发明是鉴于上述情况而完成的,提供一种能够高效且安全地从悬停过渡到水平飞行的飞行体。
13.用于解决课题的手段
14.根据本发明,得到一种飞行体,该飞行体具备:
15.飞行部,其具备翼部和设置于该翼部的旋转翼;以及
16.机身部,
17.其中,所述翼部构成为至少能够相对于行进方向维持负的迎角。
18.发明效果
19.根据本发明,能够提供一种能够高效且安全地从悬停过渡到水平飞行的飞行体。
附图说明
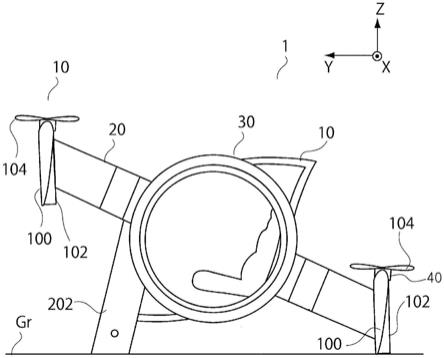
20.图1是本发明的实施方式所涉及的飞行体的图。图示的飞行体是着陆时的状态。
21.图2是从上方观察飞行体的图。
22.图3是说明本发明的实施方式所涉及的飞行体的图。图示的飞行体是上升时的状态。
23.图4是说明本发明的实施方式所涉及的飞行体的图。图示的飞行体是向行进方向的飞行状态。
24.图5是表示翼型的升力和阻力特性的曲线图。
25.图6是本发明的飞行体的功能框图。
具体实施方式
26.根据本实施方式的发明具备以下的结构。
27.[项目1]
[0028]
一种飞行体,其具备:飞行部,其具备翼部和设置于该翼部的旋转翼;以及
[0029]
机身部,
[0030]
其中,所述翼部构成为至少能够相对于行进方向维持负的迎角。
[0031]
[项目2]
[0032]
项目1所述的飞行体,其中,
[0033]
所述翼部构成为至少在悬停时能够相对于所述旋转翼的旋转中心轴维持负的迎角。
[0034]
[项目3]
[0035]
项目1或项目2所述的飞行体,其具备:
[0036]
搭乘部,其能够与所述机身部独立地位移。
[0037]
[项目4]
[0038]
项目3所述的飞行体,其中,
[0039]
所述机身部相对于飞行方向水平且垂直地延伸,
[0040]
在侧面观察时,所述搭乘部设置在所述机身部的大致中央处。
[0041]
接着,参照附图对本发明的实施方式的飞行体进行说明。
[0042]
《结构》
[0043]
如图1所示,根据本实施方式的飞行体1大致具备飞行部10、机身部20和搭乘部30。飞行部10具备翼部100、马达102和螺旋桨(旋转翼)104。翼部100构成为至少在悬停时能够相对于螺旋桨104的旋转中心轴维持负的迎角,并固定在机身部20上。固定方法可以采用公知的各种方法。此外,机身部20(以及固定在该机身部20上的飞行部10)和搭乘部30构成为能够独立地位移。
[0044]
如图2所示,在从上方观察的情况下,根据本实施方式的飞行体1具有h字形状。即,飞行体1具备前后设置的两个飞行部10以及将两个飞行部10连接的机身部20(及搭乘部30)。
[0045]
如上所述,飞行部10具备翼部100、马达102和螺旋桨104。另外,在以下的说明中,图中的x轴、y轴和z轴与方向的对应如下所述。
[0046]
x轴:第一水平方向(+x方向:左,-x方向:右)
[0047]
y轴:第二水平方向(+y方向:前,-y方向:后)
[0048]
z轴:垂直方向(+z方向:上,-z方向:下)
[0049]
翼部100在x方向上延伸,是通过马达102产生升力的部位。在初始状态(图1所示的状态)下,前缘朝上,后缘朝下。翼部100由前侧翼部100和后侧翼部100构成。
[0050]
推力产生部10通过使螺旋桨(推力产生部)104旋转而产生从推力产生部10向前方的推进力。
[0051]
马达102可以置换为发动机等。螺旋桨104能够由马达102驱动,沿顺时针方向和/或逆时针方向绕马达102的旋转轴(例如,马达的长轴)旋转。
[0052]
在本实施方式中,马达102能够使螺旋桨104全部沿同一方向旋转,也能够使螺旋桨104独立地旋转。一些螺旋桨104沿一个方向旋转,其他螺旋桨104沿另一个方向旋转。构成螺旋桨104的桨叶能够全部以相同转速旋转,也能够分别以不同转速旋转。转速可以基于移动体的尺寸(例如,大小、重量)、控制状态(速度、移动方向等)自动或手动地确定。
[0053]
螺旋桨104接受来自马达102的输出而旋转。通过螺旋桨104旋转,产生用于使飞行体1从地面g起飞、水平移动并在目的地着陆的推进力。另外,螺旋桨104能够向右方向旋转、停止和向左方向旋转。
[0054]
本发明的螺旋桨104的桨叶具有细长的形状。可以是任意数量的桨叶(旋转体)(例如,1、2、3、4或更多的桨叶)。此外,桨叶的形状可以是平坦形状、弯曲形状、扭曲形状、锥形形状或者它们的组合等任意形状。
[0055]
另外,桨叶的形状能够变化(例如,伸缩、折叠、弯折等)。桨叶可以是对称的(具有相同的上部和下部表面),也可以是非对称的(具有不同形状的上部和下部表面)。
[0056]
桨叶能够形成为翼片、机翼或适于使桨叶在空中移动时生成气动力(例如,升力、推力)的几何形状。桨叶的几何形状可以适当地选择,以优化桨叶的气动特性,如增加升力和推力、减少阻力等。
[0057]
机身部20从前侧翼部100的中央向后方延伸,并与后侧的翼部100的中央连接。
[0058]
根据本实施方式的机身部20可以由从碳、不锈钢、铝、镁等或它们的合金或组合中适当地选择的原材料形成。
[0059]
机身部20具有包含搭乘部30的大致环状的收容部。收容部设置在机身部20的大致中央附近。
[0060]
搭乘部30具有与收容部的形状对应的大致环状的形状,位于收容部的内侧。搭乘部30和收容部构成为能够沿大致环状的周向独立地位移。
[0061]
《飞行形态》
[0062]
接着,参照图3和图4,对飞行时的形态和变形进行说明。
[0063]
根据本实施方式的螺旋桨104设置为比翼部100的前缘更靠前。在图1所示的着陆状态下,使翼部100的前缘朝向上方,并且使马达单元朝向至少产生向上方向的推进力的方向。腿部202和后侧翼部(以及马达102)作为在着陆时支撑飞行体1的部位发挥功能。
[0064]
如图3所示,在飞行体1上升时和悬停时,翼部100相对于螺旋桨104的旋转中心轴成为负的迎角。此时,前侧的螺旋桨104和后侧的螺旋桨104也相对于螺旋桨104的旋转中心轴成为负的迎角。
[0065]
如图3和图4所示,在从垂直起飞(图3)过渡到水平移动(图4)时,机身部20如图中两个箭头所示那样沿周向位移,由此从水平姿态位移到前倾姿态。此时,搭乘部30保持朝向相同方向的状态。
[0066]
如图4所示,在水平移动时,翼部100相对于螺旋桨104的旋转中心轴也成为负的迎角。此时,前侧螺旋桨104和后侧螺旋桨104也相对于螺旋桨104的旋转中心轴成为负的迎
角。此时,前侧螺旋桨104和后侧螺旋桨104也相对于螺旋桨104的旋转中心轴成为负的迎角。
[0067]
图5是表示翼型的升力和阻力特性的曲线图。图5的横坐标表示迎角,纵坐标表示阻力系数和升力系数。由从图5可以清楚地看出,负的迎角的阻力系数比正的迎角的小。此外可以看出,假设若以负6度的迎角制作机身,则能够得到与零迎角的机身同等的主翼的升力。这样,若使翼部100相对于螺旋桨104的旋转中心轴成为负的迎角,则能够抑制螺旋桨尾流的阻力,并且抑制翼部100的过度迎角。
[0068]
因此,根据本实施方式的飞行体,能够安全地从悬停时过渡到水平飞行。
[0069]
《一般结构》
[0070]
图6是本发明的飞行体的功能框图。上述的飞行体例如也可以具有图6所示的结构。
[0071]
飞行控制器可以具有可编程处理器(例如,中央处理器(cpu))等一个以上的处理器。
[0072]
飞行控制器具有未图示的存储器,并且能够访问该存储器。存储器存储有为了进行一个以上的步骤而能够由飞行控制器执行的逻辑、代码和/或程序指令。
[0073]
存储器例如也可以包括sd卡、随机存取存储器(ram)等可分离的介质或外部存储装置。从照相机、传感器类获取的数据也可以直接传递并存储到存储器中。例如,由照相机等拍摄的静止图像和动态图像数据被记录在内置存储器或外部存储器中。
[0074]
飞行控制器包括构成为控制飞行体的状态的控制模块。例如,控制模块控制飞行体的推进机构(马达等),以调整具有六自由度(平移运动x、y和z、以及旋转运动θ
x
、θy和θz)的飞行体的空间配置、速度和/或加速度。控制模块可以控制搭载部、传感器类的状态中的一个以上。
[0075]
飞行控制器能够与收发部进行通信,该收发部构成为发送和/或接收来自一个以上外部设备(例如,终端、显示装置或其他远程控制器)的数据。收发机可以使用有线通信或无线通信等任意适当的通信方式。
[0076]
例如,收发部可以利用局域网(lan)、广域网(wan)、红外线、无线、wifi、点对点(p2p)网络、电信网络、云通信等中的一个以上。
[0077]
收发部可以发送和/或接收由传感器类获取的数据、飞行控制器生成的处理结果、规定的控制数据、来自终端或远程控制器的用户命令等中的一种以上。
[0078]
根据本实施方式的传感器类可以包括惯性传感器(加速度传感器、陀螺仪传感器)、gps传感器、接近传感器(例如,雷达)或视觉/图像传感器(例如,照相机)。
[0079]
本发明的飞行体有望用作中长距离的住宅配送业务专用的飞行体、以及广域的监视业务、山区的侦察和救助业务中的工业用飞行体。此外,本发明的飞行体可以用于多旋翼无人机等飞机相关产业,进一步地,在本发明中,除了可以适合用作搭载照相机等且能够执行航拍任务的飞行体以外,还可以用于安全领域、农业、基础设施监控等各种产业。
[0080]
上述实施方式仅是为了容易理解本发明的示例,并非用以限定地解释本发明。当然,本发明可以在不脱离其主旨的范围内进行变更、改进,并且本发明包括其等同物。
[0081]
在上述的实施方式中,示出了将本发明的飞行体应用于载人飞行体的例子。但是,并不限定于此。也可以将本发明的飞行体应用于无人飞行体。
[0082]
在上述的实施方式中,示出了翼部100构成为至少在悬停时能够相对于上述旋转翼的旋转中心轴维持负的迎角的例子。但是,并不限定于此。翼部100只要构成为至少能够相对于行进方向维持负的迎角即可。
[0083]
符号说明
[0084]
1 飞行体
[0085]
10 飞行部
[0086]
100 翼部
[0087]
102 马达
[0088]
104 螺旋桨(旋转翼)
[0089]
20 机身部
[0090]
30 搭乘部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1