一种无人机的制作方法
1.本实用新型涉及一种无人机技术领域,具体为一种无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.目前的无人机通过控制设备在天空中进行飞行,传统大多数的无人机比较不支持在地面上行驶,从而缺少了控制无人机的乐趣。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供了如下的技术方案:
5.一种无人机,包括无人机本体,所述无人机本体包括机舱,所述机舱的内部设置有蓄电池,所述蓄电池的一侧设置有控制器,所述控制器的一侧设置有无线信号收发模块,所述机舱两侧的两端均设置有固定圈,四个所述固定圈的内部均设置有螺旋桨,四个所述螺旋桨的底端中部均设置有转轴,四个所述转轴的底端均设置有第一驱动马达,四个所述第一驱动马达的底端均设置有固定框,四个所述固定框的底端均设置有连接块,四个所述连接块的底端均设置有连接杆,四个所述连接杆一侧均设置有伸缩杆,四个所述伸缩杆的底端位于四个连接杆的外部设置有活动件,四个所述活动件的一端均设置有第二驱动马达,四个所述第二驱动马达输出轴的一端均设置有滚轮。
6.作为本实用新型的一种优选技术方案,所述蓄电池、控制器和无线信号收发模块的底端均与机舱的内部固定连接,所述控制器和无线信号收发模块均与蓄电池电性连接,所述控制器通过无线信号收发模块与外部控制手柄设备电无线连接。
7.作为本实用新型的一种优选技术方案,四个所述固定圈的一侧均与机舱两侧的两端固定连接,四个所述固定圈均采用pvc材料制成。
8.作为本实用新型的一种优选技术方案,四个所述固定框的两端均与四个固定圈底端的两侧固定连接,四个所述第一驱动马达的底端均与四个固定框的内部固定连接。
9.作为本实用新型的一种优选技术方案,四个所述转轴的顶端和底端分别与四个螺旋桨的底端中部、四个第一驱动马达输出轴的顶端固定连接,四个的第一驱动马达均与蓄电池和控制器电性连接。
10.作为本实用新型的一种优选技术方案,四个连接块底端均与四个连接杆的顶端固定连接,四个伸缩杆的一侧均与四个连接杆固定连接,四个所述活动件顶端的一侧均与四
个伸缩杆的活塞杆底端固定连接。
11.作为本实用新型的一种优选技术方案,四个所述第二驱动马达的一端均与四个活动件的一端固定连接,四个所述滚轮一侧的中部均与四个第二驱动马达的输出轴固定连接,四个第二驱动马达均与蓄电池和控制器电性连接。
12.作为本实用新型的一种优选技术方案,四个所述伸缩杆的底端固定设置有两个支撑脚板,两个所述支撑脚板的底端均设置有防滑垫。
13.本实用新型的有益效果是:该种无人机通过四个伸缩杆底端设有的活动件以及滚轮,通过四个伸缩杆的活塞杆推动活动件以及滚轮将两个支撑脚板顶起,第二驱动马达的输出轴带动滚轮转动,使得无人机可以在地面上行驶,从而增添了控制无人机的乐趣,此种无人机结构吸引,制造成本低。
附图说明
14.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
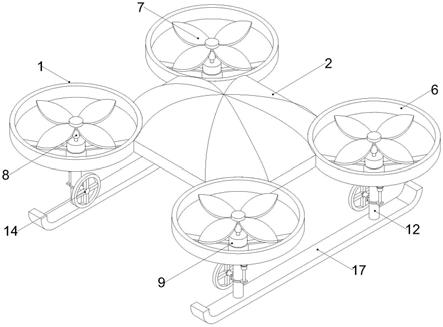
15.图1是本实用新型的结构示意图;
16.图2是本实用新型的部分结构示意图;
17.图3是本实用新型的部分结构示意图;
18.图4是本实用新型的机舱内部结构示意图。
19.图中:1、无人机本体;2、机舱;3、蓄电池;4、控制器;5、无线信号收发模块;6、固定圈;7、螺旋桨;8、转轴;9、第一驱动马达;10、固定框;11、连接块;12、连接杆;13、伸缩杆;14、活动件;15、第二驱动马达;16、滚轮;17、支撑脚板。
具体实施方式
20.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
21.实施例:如图1
‑
图3所示,本实用新型提供一种无人机,包括无人机本体1,无人机本体1包括机舱2,机舱2的内部设置有蓄电池3,蓄电池3的一侧设置有控制器4,控制器4的一侧设置有无线信号收发模块5,机舱2两侧的两端均设置有固定圈6,四个固定圈6的内部均设置有螺旋桨7,四个螺旋桨7的底端中部均设置有转轴8,四个转轴8的底端均设置有第一驱动马达9,四个第一驱动马达9的底端均设置有固定框10,四个固定框10的底端均设置有连接块11,四个连接块11的底端均设置有连接杆12,四个连接杆12一侧均设置有伸缩杆13,四个伸缩杆13的底端位于四个连接杆12的外部设置有活动件14,四个活动件14的一端均设置有第二驱动马达15,四个第二驱动马达15输出轴的一端均设置有滚轮16。
22.其中,蓄电池3、控制器4和无线信号收发模块5的底端均与机舱2的内部固定连接,控制器4和无线信号收发模块5均与蓄电池3电性连接,控制器4通过无线信号收发模块5与外部控制手柄设备无线连接,通过在机舱2内部设有的蓄电池3、控制器4和无线信号收发模块5,使其通过蓄电池3和控制器4为四个第一驱动马达9和四个第二驱动马达15提供电源及控制以保证正常工作。
23.其中,四个固定圈6的一侧均与机舱2两侧的两端固定连接,四个固定圈6均采用
pvc材料制成,通过设有的四个固定圈6固定在机舱2两侧的两端,且四个固定圈6均采用pvc制成,使其提高了无人机本体1的平衡性和重量。
24.其中,四个固定框10的两端均与四个固定圈6底端的两侧固定连接,四个第一驱动马达9的底端均与四个固定框10的内部固定连接,通过四个第一驱动马达9的底端均与四个固定框10的内部固定连接,使其通过四个固定框10将四个第一驱动马达9固定在四个固定框10的底端。
25.其中,四个转轴8的顶端和底端分别与四个螺旋桨7的底端中部、四个第一驱动马达9输出轴的顶端固定连接,四个第一驱动马达9均与蓄电池3和控制器4电性连接,通过四个第一驱动马达9的输出轴均与四个螺旋桨7的底端中部固定连接,使其四个第一驱动马达9的输出轴带动四个螺旋桨7转动,无人机本体1通过四个螺旋桨7转动进行飞行。
26.其中,四个连接块11底端均与四个连接杆12的顶端固定连接,四个的伸缩杆13的一侧均与四个连接杆12的固定连接,四个活动件14顶端的一侧均与四个伸缩杆13的活塞杆的底端固定连接,通过四个活动件14顶端的一侧均与四个伸缩杆13的活塞杆的底端固定连接,使其四个伸缩杆13的活塞杆推动四个活动件14顺着四个连接杆12的外部向下运动,将无人机本体1顶起,四个滚轮16着地。
27.其中,四个的第二驱动马达15的一端均与四个活动件14的一端固定连接,四个滚轮16一侧的中部均与四个第二驱动马达15的输出轴固定连接,四个第二驱动马达15均与蓄电池3和控制器4电性连接,通过四个滚轮16一侧的中部均与四个第二驱动马达15的输出轴固定连接,使其四个第二驱动马达15的输出轴带动四个滚轮16转动,使其无人机本体1可以在地面上行驶。
28.其中,四个伸缩杆13的底端固定设置有两个支撑脚板17,两个支撑脚板17的底端均设置有防滑垫,通过设有的两个支撑脚板17以及底部设有的防滑垫,使其无人机本体1稳定的支撑在地面上。
29.工作时,通过设有的四个固定圈6固定在机舱2两侧的两端,且四个固定圈6均采用pvc制成,使其提高了无人机本体1的平衡性和重量。通过四个第一驱动马达9的底端均与四个固定框10的内部固定连接,使其通过四个固定框10将四个第一驱动马达9固定在四个固定框10的底端。通过四个第一驱动马达9的输出轴均与四个螺旋桨7的底端中部固定连接,使其四个第一驱动马达9的输出轴带动四个螺旋桨7转动,无人机本体1通过四个螺旋桨7转动进行飞行。通过四个活动件14顶端的一侧均与四个伸缩杆13的活塞杆的底端固定连接,使其四个伸缩杆13的活塞杆推动四个活动件14顺着四个连接杆12的外部向下运动,将无人机本体1顶起,四个滚轮16着地。通过四个滚轮16一侧的中部均与四个第二驱动马达15的输出轴固定连接,使其四个第二驱动马达15的输出轴带动四个滚轮16转动,使其无人机本体1可以在地面上行驶。通过在机舱2内部设有的蓄电池3、控制器4和无线信号收发模块5,使其通过蓄电池3和控制器4为四个第一驱动马达9和四个第二驱动马达15提供电源及控制以保证正常工作。
30.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均
应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1