一种轮腿式移动机器人蠕动的控制系统及其控制方法
1.本发明属于机器人控制技术领域,具体而言,涉及一种轮腿式移动机器人蠕动控制系统及其控制方法。
背景技术:
2.随着各国对月球和火星等星球探测程度的不断加深,陨石坑等复杂环境也成为了探测的目标,这要求星球探测移动机器人具备较强的大角度爬坡移动能力和多地形自适应能力。轮腿式移动机器人具有多自由度轮腿结构可实现蠕动等多种步态,具备较强移动能力,被广泛用于星球探测中。轮腿式移动机器人在蠕动爬坡过程中,由于驱动车轮与制动车轮的不协调会造成制动轮后退滑移较大和驱动轮滑转率过大的情况,这些都会增加机器人的能源消耗和爬坡失败的风险。因此,驱动轮与制动轮之间的协调控制是充分发挥机器人牵引能力和节省能源的一个重要问题。
3.为解决上述问题,一些研究人员通过在车轮安装六维力传感器来实现对车轮牵引力的直接控制,但六维力传感器较重不适合安装在机器人上。在一定滑转率变化范围内,车轮牵引力随滑转率增大而增大,一些研究人员根据驱动轮和制动轮的牵引力和后退阻力需求,制定了以滑转率为目标的车轮转速控制方法,但对于复杂多变的地形,轮地接触模型参数和合适的车轮目标滑转率很难准确确定。因此,需要增强控制方法的智能化程度,提高对多变地形的自适应能力。
技术实现要素:
4.本发明解决的问题是轮腿式移动机器人在蠕动过程中驱动轮与制动轮不协调造成驱动车轮滑转率过大、车体后退较大而导致机器人爬坡失败和增大机器人能耗的问题。
5.本发明提供一种轮腿式移动机器人蠕动控制系统及其控制方法,所述控制系统包括速度传感器、比较器、微分器、模糊控制器、保留器、下一级控制器、驱动车轮和制动车轮;
6.所述速度传感器用于测得车轮实际线速度;
7.所述比较器用于计算制动车轮线速度误差;
8.所述微分器用于计算线速度误差变化率;
9.所述模糊控制器用于模糊推理得到车轮滑转率调节增量;
10.所述保留器用于保存上一次滑转率目标值;
11.所述下一级控制器用于控制车轮转速以使车轮达到目标滑转率;
12.所述驱动车轮和制动车轮为控制系统的控制对象。
13.所述控制方法包括如下步骤:
14.(一)利用所述速度传感器获取机器人蠕动过程制动车轮的线速度,并得到制动轮平均线速度v=∑v
i
/j(j为制动轮数量),规定机器人后退方向速度符号为负。所述比较器的两个输入量分别为机器人制动车轮的实际线速度和目标线速度0,并通过比较器和微分
器计算得到制动车轮的线速度误差e=v
‑
0=v和线速度误差变化率
15.(二)把获得的制动车轮的线速度误差和线速度误差变化率作为所述模糊控制器的输入量,利用隶属函数模糊量化获得两个对应的模糊输入量e和ec;
16.(三)把获得的制动车轮线速度误差和线速度误差变化率两个模糊输入量e和ec根据模糊规则进行模糊推理,以获得对应的驱动轮滑转率调节增量和制动轮滑转率调节增量两个模糊控制输出量δs
dri
和δs
bra
;
17.(四)根据获得的两个模糊控制输出量δs
dri
和δs
bra
经解模糊后得到车轮滑转率调节增量δs
dri
和δs
bra
,与保留器中上一次滑转率目标值相加迭代计算得到本次驱动轮与制动轮滑转率目标值,将车轮滑转率目标值存入保留器中并输入到下一级控制器中,控制车轮达到目标滑转率,使机器人在蠕动过程中获得良好的牵引性能和行驶效率。
18.进一步地,上述方法中所述制动轮线速度误差e、线速度误差变化率、驱动轮滑转率变化值δs
dri
和制动轮滑转率变化值δs
bra
的模糊语言值为:{nb,ns,ze,ps,pb},集合中的元素分别代表负大、负小、零、正小、正大。
19.进一步地,上述方法中所述模糊规则为:
20.若ec为负大且e为负,则δs
dri
为正大;若ec为负小且e为负,则δs
dri
为正小;若e为负大且ec为负,则δs
bra
为正大;若e为负小且ec为负,则δs
bra
为正小;
21.若ec为正大且e为正,则δs
dri
为负大;若ec为正小且e为正,则δs
dri
为负小;若e为正大且ec为正,则δs
bra
为负大;若e为正小且ec为正,则δs
bra
为负小;
22.若ec为零且e为零,则δs
dri
和δs
bra
均为零;
23.若ec与e符号相反,则δs
dri
和δs
bra
均为零;
24.进一步地,上述方法中所述的车轮滑转率调节增量δs
dri
和δs
bra
与保留器中上一次滑转率目标值相加迭代计算得到本次驱动轮与制动轮滑转率目标值为:
25.s
dri
=s
′
dri
+δs
dri
,s
bra
=s
′
bra
+δs
bra
26.其中,s
′
dri
和s
′
bra
为保留器中上一次的车轮滑转率目标值。
27.进一步地,上述方法中所述的模糊控制器进行驱动轮和制动轮的滑转率增量控制,输出为δs
dri
和δs
bra
,两个下一级控制器输入为s
dri
和s
bra
,分别进行驱动轮和制动轮滑转率控制。
附图说明
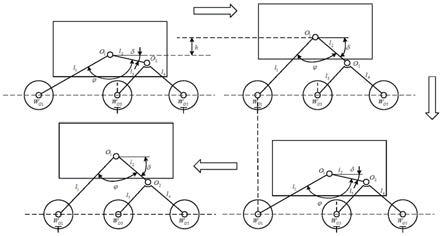
28.图1为轮腿式移动机器人蠕动示意图;
29.图2为轮腿式移动机器人蠕动的控制系统结构图;
30.图3为模糊控制器内部结构图;
31.图4为模糊控制器语言变量隶属函数图。
具体实施方式
32.下面结合附图以及具体实施方式对本发明做进一步描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
33.轮腿式移动机器人通过改变主摇臂间夹角,同时控制车轮转速,使一部分车轮作
为制动轮相对地面保持静止,另一部分车轮作为驱动轮相对地面运动,使机器人进行周期性蠕动动作。如图1所示为六轮轮腿式机器人后向蠕动示意图,其中在后向蠕动前半周期前两车轮wo1和wo2作为驱动轮,后四个车轮wo3~wo6为制动轮;在后向蠕动后半周期前两车轮wo1和wo2作为制动轮,后四个车轮wo3~wo6为驱动轮。
34.轮腿式移动机器人蠕动的控制系统结构图如图2所示,其中包括速度传感器、比较器、微分器、模糊控制器、保留器、下一级控制器、驱动车轮和制动车轮。其中,速度传感器用于测得车轮实际线速度,比较器用于计算制动车轮线速度误差,微分器用于计算线速度误差变化率,模糊控制器用于模糊推理得到车轮滑转率调节增量,保留器用于保存上一次滑转率目标值,下一级控制器用于控制车轮转速以使车轮达到目标滑转率,驱动车轮和制动车轮为控制系统的控制对象。
35.所述控制系统的控制方法包括以下步骤:
36.(一)利用所述速度传感器获取机器人蠕动过程制动车轮的线速度,并得到制动轮平均线速度v=∑v
i
/j(j为制动轮数量),规定机器人后退方向速度符号为负。所述比较器的两个输入量分别为机器人制动车轮的实际线速度和目标线速度0,并通过比较器和微分器计算得到制动车轮的线速度误差e=v
‑
0=v和线速度误差变化率
37.(二)把获得的制动车轮的线速度误差和线速度误差变化率作为所述模糊控制器的输入量,利用隶属函数模糊量化获得两个对应的模糊输入量e和ec;
38.如图3所示为模糊控制器的内部结构图,模糊控制器的语言变量定义在模糊集上的基本论域为:
[0039][0040]
其模糊子集为{nb,ns,ze,ps,pb},子集中元素分别代表负大、负小、零、正小、正大。
[0041]
设e,变化范围为[
‑
4,4],若不在此区间,可通过线性变化公式将取值在[a,b]间的连续量转换到[
‑
4,4]之间。
[0042][0043]
各模糊状态的隶属函数选择对称三角形,如图4所示。利用三角形对称隶属函数模糊量化制动车轮的线速度误差e和线速度误差变化率获得两个对应的模糊输入量e和ec;
[0044]
(三)把获得的制动车轮线速度误差和线速度误差变化率两个模糊输入量e和ec根据模糊规则进行模糊推理,以获得对应的驱动轮滑转率调节增量和制动轮滑转率调节增量两个模糊控制输出量δs
dri
和δs
bra
;
[0045]
模糊规则为:
[0046]
若ec为负大且e为负,则δs
dri
为正大;若ec为负小且e为负,则δs
dri
为正小;若e为负大且ec为负,则δs
bra
为正大;若e为负小且ec为负,则δs
bra
为正小;
[0047]
若ec为正大且e为正,则δs
dri
为负大;若ec为正小且e为正,则δs
dri
为负小;若e为
正大且ec为正,则δs
bra
为负大;若e为正小且ec为正,则δs
bra
为负小;
[0048]
若ec为零且e为零,则δs
dri
和δs
bra
均为零;
[0049]
若ec与e符号相反,则δs
dri
和δs
bra
均为零;
[0050]
根据模糊规则制定出的模糊规则表如下所示:
[0051][0052]
注:表格中有2个模糊控制规则,从左到右分别为δs
bra
和δs
dri
的模糊控制规则。
[0053]
模糊控制器的输出变量δs
dri
和δs
bra
利用重心法解模糊得到车轮滑转率调节增量δs
dri
和δs
bra
。
[0054]
驱动轮的滑转率定义为,
[0055][0056]
制动轮的滑转率定义为,
[0057][0058]
其中ω为正值,v为负值。驱动轮的滑转率初值为0.8,取值范围为0.6~0.9。制动轮的滑转率初值为1,取值范围为1~1.9。
[0059]
(四)将获得的车轮滑转率调节增量δs
dri
和δs
bra
,与保留器中上一次滑转率目标值相加迭代计算得到本次驱动轮与制动轮滑转率目标值为:
[0060]
s
dri
=s
′
dri
+δs
dri
,s
bra
=s
′
bra
+δs
bra
[0061]
其中,s
′
dri
和s
′
bra
为保留器中上一次计算得到的滑转率目标值。
[0062]
将本次驱动轮与制动轮滑转率目标值存入保留器中并输入到下一级控制器中,下一级的两个控制器使用adrc自抗扰控制器,控制车轮转速以快速达到车轮目标滑转率。
[0063]
应当理解,以上发明仅为本发明的较佳实施例,并不用于限定此发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1