一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构
1.本发明涉及仿生结构工程技术领域,具体涉及一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构。
背景技术:
2.月球具有丰富的矿物资源,是人类进军深空的重要中转站,也是最重要的天然太空实验基地。因此,开展月球探测对人类发展具有十分重要的意义。在整个探月过程中,着陆探测器安全平稳月面着陆是需要完成的主要任务之一。在软着陆过程中,足垫是直接与月壤冲击接触的着陆器部件,足垫能否很好地承受冲击荷载并保持着陆探测器的稳定性直接关系到设备能否正常运行及后续探测工作的实施。但是,目前应用的着陆器足垫多是厚重的金属圆盘形足垫,既提高了制造成本,又增加了着陆和返航过程中的能源消耗,一定程度上限制了探测器的运动半径。因此,在保持力学性能的前提下,开展着陆器足垫的轻量化设计研究具有非常大的意义。
技术实现要素:
3.发明目的:本发明目的在于提供一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构,替代传统厚重的金属圆盘足垫,同时保持足垫力学性能和稳定性的要求。
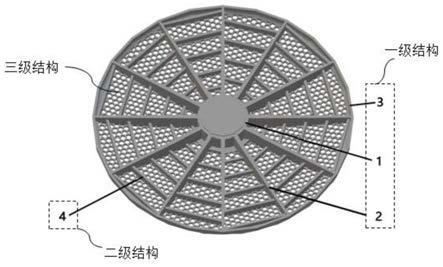
4.技术方案:一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构,由多级结构组成,所述多级结构包括一级结构、二级结构和三级结构;
5.所述一级结构包括一个内轮圈、一个外轮圈及数根沿内轮圈的圆周径向延伸的轮条;所述内轮圈和外轮圈同轴设置;任一所述轮条的一端与内轮圈连接,另一端与外轮圈连接;所述轮条与内轮圈和外轮圈一体成型;
6.所述二级结构包括多根长度不一的横条,平行排列在一级结构中相邻的轮条构成的扇形结构中,横条与轮条形成的夹角均相等;所述二级结构是增强足垫承载能力的主要加强件;
7.所述三级结构填充在一级结构和二级结构之间。三级结构覆盖整个结构,是提高着陆稳定性和吸能的主要结构。
8.进一步的,所述一级结构、二级结构和三级结构一体成型。
9.进一步的,所述内轮圈的半径为25mm,高度为20mm。
10.进一步的,所述轮条的宽度在半径方向呈梯度变化,高度随足垫弧度呈非线性梯度变化,从与内轮圈相接的一端到与外轮圈相接的一端宽度和高度逐渐减小,宽度变化范围为2.5mm~4mm,高度变化范围为5~20mm,轮条的长度为100mm。
11.进一步的,所述外轮圈半径为内轮圈半径及轮条长度之和,高度为5mm。
12.进一步的,所述轮条的数量为6、8或12根;相邻轮条之间的角度相等。
13.进一步的,所述横条的宽度为2.5mm,高度为7.5mm,每根横条之间的距离为20mm。
14.进一步的,所述三级结构包括蜂窝结构。
15.进一步的,所述蜂窝的边长为2.5mm。
16.进一步的,所述一级结构、二级结构和三级结构的材质为alsi10mg。
17.有益效果:本发明从仿生学的角度出发,通过模仿圆筛藻的硅质截头体的结构特点,设计出了一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构,经有限元模拟分析表明此结构具有良好的抗冲击能力,同时还实现了结构的轻量化,可减少结构在制造和使用过程中的投入。
附图说明
18.图1为本发明实施例1的结构示意图;
19.图2为本发明实施例2的结构示意图;
20.图3为本发明实施例3的结构示意图;
21.图4为本发明实施例4的结构示意图;
22.图5为本发明实施例1~4的抗冲击能力折线图;
23.图6为本发明实施例1~4的吸能过程示意图;
24.图7为本发明实施例1~4的吸能能力柱状图。
具体实施方式
25.以下将结合附图对本发明技术方案作进一步的说明,但是本发明的保护范围不限于所述的实施例。
26.本发明中,一级支撑结构为足垫承受荷载的主要构件,吸收了绝大部分的能量,同时在一级结构的辐射中心内轮圈1可以装配着陆器支架。当足垫受到冲击时,二级结构可以有效保持一级结构的稳定性,辅助一级结构承受载荷。三级结构有效改善了结构变形能力,保证了足垫着陆的稳定性。整体结构交错分布,保证了整体结构的完整性,可以很好的抵抗外力,防止应力集中,使整个结构具有良好的力学性能和使用性能。
27.实施例1:一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构,由一级结构、二级结构和三级结构组成,内轮圈1的半径为25mm,高度为20mm;足垫半径即外轮圈3半径为125mm,高度为5mm;轮条2的数量为12根,相邻轮条2之间的角度为30
°
,轮条2的宽度在半径方向呈线性梯度变化,高度随足垫弧度呈非线性梯度变化,从与内轮圈1相接的一端到与外轮圈3相接的一端宽度和高度逐渐减小,宽度变化范围为2.5mm~4mm,高度变化范围为5~20mm,长度为100mm;二级结构的横条4宽度为2.5mm,高度为7.5mm,每根横条4间距为20mm,三级蜂窝结构边长为2.5mm。
28.一级结构为主要支撑结构,二级结构可保持一级结构的稳定性并提供次级支撑,三级结构提高整体结构的稳定性。
29.实施例2:一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构,由一级结构、二级结构和三级结构组成,内轮圈1的半径为25mm,高度为20mm;足垫半径即外轮圈3半径为125mm,高度为5mm;轮条2的数量为8根,相邻轮条2之间的角度为45
°
,轮条2的宽度在半径方向呈线性梯度变化,高度随足垫弧度呈非线性梯度变化,从与内轮圈1相接的一端到与外轮圈3相接的一端宽度和高度逐渐减小,宽度变化范围为2.5mm~4mm,高度变化范围为
5~20mm,长度为100mm;二级结构的横条4宽度为2.5mm,高度为7.5mm,每根横条4间距为20mm,三级蜂窝结构边长为2.5mm。
30.一级结构为主要支撑结构,二级结构可保持一级结构的稳定性并提供次级支撑,三级结构提高整体结构的稳定性。
31.实施例3:一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构,由一级结构、二级结构和三级结构组成,内轮圈1的半径为25mm,高度为20mm;足垫半径即外轮圈3半径为125mm,高度为5mm;轮条2的数量为6根,相邻轮条2之间的角度为60
°
,轮条2的宽度在半径方向呈线性梯度变化,高度随足垫弧度呈非线性梯度变化,从与内轮圈1相接的一端到与外轮圈3相接的一端宽度和高度逐渐减小,宽度变化范围为2.5mm~4mm,高度变化范围为5~20mm,长度为100mm;二级结构的横条4宽度为2.5mm,高度为7.5mm,每根横条4间距为20mm,三级蜂窝结构边长为2.5mm。
32.一级结构为主要支撑结构,二级结构可保持一级结构的稳定性并提供次级支撑,三级结构提高整体结构的稳定性。
33.实施例4:一种用于航天着陆器足垫的轻质高强仿圆筛藻多层级支撑结构,由一级结构、二级结构和三级结构组成,内轮圈1的半径为25mm,高度为20mm;足垫半径即外轮圈3半径为125mm,高度为5mm;轮条2的数量为8根,相邻轮条2之间的角度为45
°
,轮条2的宽度在半径方向呈线性梯度变化,高度随足垫弧度呈非线性梯度变化,从与内轮圈1相接的一端到与外轮圈3相接的一端宽度和高度逐渐减小,宽度变化范围为2.5mm~4mm,高度变化范围为5~20mm,长度为100mm;二级结构的横条4宽度为2.5mm,高度为7.5mm,每根横条4间距为20mm,不使用蜂窝结构,使三级结构密封。
34.实施例1~3的仿生足垫结构的性能表征方法如下所示:
35.对仿生着陆器足垫结构进行力学性能研究,通过实验获得slm成型铝合金的力学性能参数,如杨氏模量、拉伸强度、断裂伸长率等,并将这些参数输入有限元分析软件ls
‑
dyna中,然后导入模型、划分网格、添加边界及载荷条件,最后通过内置求解器求解结构的力学性能,如变形能力、应力分布、破坏承载力等。
36.通过有限元分析手段对结构的力学性能进行分析,既可以较准确地预测结构的实际性能,还可以大大降低发明成本,提高发明效率。
37.如上所述,尽管参照特定的优选实施例已经对本发明进行了表述和说明,但不得解释为对本发明自身的限制。在不脱离所附权力要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1