一种自主感知移动的航天器表面爬行机器人
1.本发明属于移动机器人领域,尤其涉及一种自主感知移动的航天器表面爬行机器人。
背景技术:
2.机器人在轨服务作为空间基础设施的一个主要组成部分,是发展空间前沿的关键。在轨服务概念最早是在20世纪60年代提出的,然后在上个世纪的许多重点任务中得到实施。实际上,机器人在轨服务对我国当前的航天事业也具有重要意义,随着我国空间站的建造与运营工作的深入,必然涉及到对空间站外部的监测和维修等在轨服务。这些检测和维修如果由航天员来完成的话,那么会对航天员的生命健康造成危险。而且对于一般的航天器来说,并不会配备航天员,只能依赖于机器人在轨服务对航天器进行监测和维修。
3.机器人在轨服务的主要应用包括:在轨维修、航天器对接、在轨停泊、在轨加注、在轨运输、航天器外表面检查、空间救援和清除轨道碎片。
4.在轨维修、航天器表面检查、空间救援等对大部分航天器都有重要意义。实际上统计数据显示,在过去十年中,平均每年发射100颗卫星(从78颗到130颗),它们中的大多数在执行任务时没有出现任何重大问题。然而,它们中的小部分出现了不同程度的异常甚至故障,甚至近几年来在轨故障超过了发射故障。在过去,航天器只能通过软件更新来维持异常航天器的性能,而一旦航天器发生故障即意味着废弃。这累计造成数十亿美元的损失。
5.而在轨维修为航天器发生的硬件故障提供了一个修复的机会,这能有效的延长航天器的寿命。一个典型的例子是哈勃太空望远镜(hst)进行了五次维修,其中包括更换电路板。航天器表面检查则能对航天器的健康状况进行评估以发现潜藏的风险,空间救援则是对已经故障无法回应的航天器进行主动救援排除故障。这些在轨服务能够有效的减少航天器的故障报废率,具有良好的经济效益。
6.但目前使用的在轨服务通常是一个或多大安装在航天器上的大型机械臂提供,这种方式的好处在于机械臂运动范围大,自由度高,可以执行多种在轨服务任务,如捕获、维修等。但机械臂制造、安装、发射成本昂贵,控制难度大,只有极少数航天器具备在轨服务能力,并主要为大型航天器提供服务(如空间站)。同时,基于机械臂的在轨服务需要先对航天器进行对接和捕获,这对信息未知的非合作航天器来说难度较大,且具有较高风险。
7.另一种思路是将灵巧小型的太空爬行机器人用于在轨服务。能够在航天器表面爬行的机器人降低了在轨服务成本和难度,可完成对航天器关键部位的检测和故障部位的维修与更换。但目前已有的面向太空应用的爬行机器人需要人为操控完成任务,无法自主感知环境进行无碰撞路径规划和移动,限制了其应用场合。
技术实现要素:
8.本发明的目的在于针对现有技术的不足,提供一种自主感知移动的航天器表面爬行机器人,可实现在航天器表面吸附并智能自主爬行,无需人为操控进行避障,可广泛应用
于航天器表面的自主检测、自主维修等在轨服务任务;同时通过对静电吸附模块的优化,使其配合机器人步态进行吸附,增强了其可靠性。
9.本发明的目的是通过以下技术方案来实现的:一种自主感知移动的航天器表面爬行机器人,包括机械结构和控制系统两个部分;
10.机器人机械结构包括:
11.a.由十八个舵机构成的六个腿足,其安装在机器人底板和中板之间,左右对称分布,使用一个连接件和一个固定件连接三个舵机组成机器人的一个足,并将足端机构安装在足末端舵机上;
12.b.由多个功能模块组成的机器人平台主体,分别是放置在机器人中板上用于给机器人系统供电的蓄电池,由静电吸附膜、继电器开关和升压器组成的静电吸附模块,以及安装在机器人顶板上内置imu传感器的深度相机;机器人平台主体被封闭式外壳包裹,太阳能片安装在外壳上;
13.机器人控制系统包括:
14.a.控制系统硬件由嵌入式微处理器和扩展接口板组成,嵌入式微处理器用于接收感知信息并实时运行视觉建图算法和路径规划算法;扩展接口板用于连接微处理器和其他功能硬件,包括深度相机、总线舵机和静电吸附模块;
15.b.控制系统主要功能是感知重构周围环境地图,进行路径规划和六足逆运动学计算,控制机器人舵机转动角度,同时配合机器人步态控制吸附力的有无,实现机器人在航天器表面的吸附和自主移动。
16.进一步地,所述静电吸附模块为静电吸附膜、继电器开关、升压器组成的一个充放电电路;升压器输入连接蓄电池,升压器输出连接六个控制充电的继电器开关,每个控制充电的继电器开关输出分别连接一个静电吸附膜和一个控制放电的继电器开关,静电吸附膜和控制放电的继电器开关另一端接地;如果控制充电的继电器开关闭合,控制放电的继电器开关打开,则吸附膜充电,如果控制充电的继电器开关打开,控制放电的继电器开关闭合,则吸附膜放电。
17.进一步地,所述控制系统可根据机器人的步态需求,实现吸附膜的充放电从而控制吸附力大小;在机器人抬腿前,吸附膜放电,静电吸附力消失,减小机器人抬腿所需的力矩,相比于其他吸附方式减少了因震动脱附航天器的风险;在机器人落腿前,吸附膜充电,落腿后可快速吸附。
18.进一步地,将太阳能片贴附在机器人外壳上,用于收集太阳能转化为电能给蓄电池补电,保证了机器人能够长期自主工作的供电需求。
19.进一步地,所述控制系统实现了感知
‑
决策
‑
控制的闭环自主移动控制,实现流程包括:控制系统接收深度相机输入的rgb图像、深度图像和imu信息,计算得到栅格网络地图,进行机器人位姿估计;根据地图、位姿和目标信息(可人为指定目标)运行路径规划算法得到无碰最优路径;根据路径进行六足逆运动学计算,得到舵机转动角度,并控制舵机转动,反馈给位姿估计;
20.首先计算栅格网络地图,需要当前深度图像对应的世界坐标点,计算公式如下:
[0021][0022]
其中u、v为图像坐标系下的任意坐标点,u0、v0为图像的中心坐标,x
w
、y
w
、z
w
表示世界坐标系下的三维坐标点;z
c
表示相机坐标的z轴值,即目标到相机的距离;r,t分别为外参矩阵的3x3旋转矩阵和3x1平移矩阵;f为相机焦距,1/dx,1/dy分别表示单位距离下的像素点个数;当相机坐标系和世界坐标系的原点重合时,进一步简化可得到:
[0023][0024]
在得到深度图像对应的点云后,将点云转化为八叉树格式的体素栅格网络,即得到栅格网络地图;位姿信息由imu传感器采集的加速度和角速度积分得到;
[0025]
根据地图、位姿和目标信息运行基于图搜索路径规划算法——a*算法,搜索得到一条到达目标的无碰撞最优路径,得到最优路径后,通过机器人的六足逆运动学计算出舵机每次转动的角度;六足机器人逆运动学计算原理如下:
[0026]
根据d
‑
h方法建立单足局部坐标系,以舵机与机器人主体平台相连的点作为起点,相邻关节坐标系的转换矩阵为其标准形式为:
[0027][0028]
其中a
i
‑1表示前一关节的长度;d
i
表示关节i
‑
1和关节i之间的偏置;θ
i
表示两关节的夹角,即关节角;α
i
‑1表示关节i
‑
1的扭角,为由关节i
‑
1的轴线绕两关节公垂线转至关节i的角度;m表示第m个足;
[0029]
单足的d
‑
h参数如下表所示:
[0030]
杆号α
i
‑1a
i
‑1d
i
θ
i
1000θ12π/2l10θ230l20θ340l300
[0031]
其中杆1为连接腿足和机器人主体平台的舵机与连接件构成的刚体,其长度为l1;杆2为固定件及固定件两端舵机构成的刚体,其长度为l2;杆3为足端机构,其长度为l3;杆4为足端机构与地面接触点;
[0032]
足端点坐标系到腿足与机器人主体平台连接点坐标系的转换矩阵为:
[0033][0034]
展开后计算得到:
[0035][0036]
其中c
i
=cosθ
i
,s
i
=sinθ
i
,c
ij
=cos(θ
i
+θ
j
),s
ij
=sin(θ
i
+θ
j
);
[0037]
根据转换矩阵,设在全局坐标系下舵机与机器人主体平台相连的点的坐标为(x0、y0、z0),机器人足端点的坐标为(x、y、z),求解关节角θ
i
的逆运动学公式如下:
[0038][0039][0040][0041]
关节角即为机器人舵机需要转动的角度,控制系统通过扩展接口板连接到舵机后控制其转动相应角度,实现了感知
‑
决策
‑
控制的完整的自主移动控制。
[0042]
进一步地,对机器人吸附和移动能力进行动力学仿真;因为静电吸附力与吸附膜面积、电压成正相关,在高压固定的情况下,吸附力与膜面积成正比,所以需要在允许范围内尽可能减小吸附力,从而减小吸附膜占用空间;实际上在太空微重力环境下无需很大吸附力,但高压静电吸附膜提供的吸附力需要克服单腿抬起时,姿态扰动和微振动对机器人吸附可靠性和稳定性的影响,同时机器人在航天器上的移动需要摩擦力,在前进、转弯等经典步态中,吸附力提供的摩擦力能够满足其需求;
[0043]
使用多体动力学仿真软件计算得到机器人在航天器表面移动所需的吸附力和摩擦力,同时验证机器人移动步态的可行性;主要仿真流程如下:
[0044]
(1)简化机器人模型,只保留转动关节和主要质量刚体,将模型导入多体动力学仿真软件;
[0045]
(2)根据机器人实际形态定义转动副、移动副、与壁面接触力、吸附力、各部件质量参数;
[0046]
(3)将仿真环境设置为无重力环境以模拟太空环境;
[0047]
(4)根据机器人步态设计和机器人逆运动学计算得到的舵机转动角度,将其作为仿真中的控制函数;
[0048]
(5)在机器人足端施加一个预紧力,然后运行仿真,计算得到足端所需摩擦力,根据静电吸附膜实际摩擦力性能决定吸附膜面积和电压;
[0049]
(6)观测机器人质心的移动,是否按照预定的移动方向和步伐进行,验证机器人移动能力。
[0050]
本发明的有益效果是:
[0051]
1.本发明为爬行机器人设计的自主移动控制系统,实现了感知
‑
规划
‑
控制的闭环自主移动控制,包括运行视觉建图算法、路径规划算法和逆运动学计算,并控制舵机转动,最终实现在航天器表面的自主避障和移动。
[0052]
2.本发明使用基于静电吸附原理作为吸附力来源,简化了机器人结构设计难度;同时静电吸附模块采用了一个吸附膜配一个充电电路一个放电电路的设计,允许控制系统根据步态调节吸附力,减小抬腿所需力矩,降低振动脱离航天器的风险。
[0053]
3.本发明提供了一种爬行机器人动力学仿真方法,可快速计算实际机器人在航天器表面爬行所需的最小吸附力,实现最优吸附膜面积选择。
[0054]
4.本发明将太空爬行机器人所需的升压器、继电器开关、嵌入式微处理器、扩展板、蓄电池等集成在尺寸为12cm*10.5cm*10cm的机器人主体中,减少了制造和发射成本,降低了在轨服务使用门槛。
附图说明
[0055]
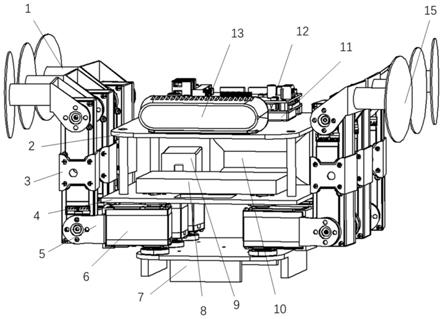
图1为本发明实施例提供的爬行机器人内部结构图;
[0056]
图2为本发明实施例提供的爬行机器人外壳结构图;
[0057]
图3为六足机器人三角步态示意图
[0058]
图4为本发明实施例提供的静电吸附膜充放电原理图;
[0059]
图5为本发明实施例提供的控制系统自主移动控制流程图;
[0060]
图6为本发明实施例提供的单足运动学模型图;
[0061]
图7为本发明实施例提供的adams软件中仿真模型图;
[0062]
图8为本发明实施例提供的仿真计算所需摩擦力结果;
[0063]
图9为本发明实施例提供的仿真计算机器人质心位移结果。
具体实施方式
[0064]
下面结合附图和具体实施例对本发明作进一步详细说明。
[0065]
本发明实施例提供的一种自主感知移动的航天器表面爬行机器人,包括机械结构和控制系统两部分;
[0066]
机器人机械结构如图1、2所示,包括:
[0067]
a.由十八个舵机6构成的六个腿足,其安装在机器人底板7和中板4之间,左右对称分布,使用一个连接件5和一个固定件3连接三个舵机6组成机器人的一个足,并将足端机构1安装在足末端舵机上;本实施例中舵机6采用uart异步半双工串行总线舵机,舵机6上有两个i/o,可以将舵机间通过双接口相互连接,最后引出一个i/o与嵌入式微处理器11相连接,从而实现舵机的串行控制,简化嵌入式微处理器11上的串口占用。
[0068]
b.由多个功能模块组成的机器人平台主体,分别是放置在机器人中板4上的蓄电池10用于给机器人系统供电,由静电吸附膜15、继电器开关8和升压器9组成的静电吸附模块以及安装在机器人顶板2上的深度相机13,深度相机13内置imu传感器;机器人平台主体被封闭式外壳14包裹,太阳能片15安装在外壳上;
[0069]
机器人控制系统包括:
[0070]
a.控制系统硬件由嵌入式微处理器11和扩展接口板12组成,如图1所示,嵌入式微处理器用于接收感知信息并实时运行视觉建图算法和路径规划算法;扩展接口板用于连接微处理器和其他功能硬件,包括深度相机、总线舵机和静电吸附模块;
[0071]
b.控制系统主要功能是感知重构周围环境地图,进行路径规划和六足逆运动学计
算,控制机器人舵机转动角度,同时配合机器人步态控制吸附力的有无,实现机器人在航天器表面的吸附和自主移动。
[0072]
具体地,六足结构的机器人相对其他足式结构,具有最高效的静态移动特性,当其使用如图3所示的三角步态时,以三个足为一组,交替支撑前进,如图所示,三个足分别从a,b,c移动到a’,b’,c’,能够保证机器人沿直线运动,同时始终有三个足作为机器人的支撑足,机器人质心落在三足构成的三角形之间,十分稳定。
[0073]
舵机转动能量来源于蓄电池10,蓄电池10为6000mah的容量,蓄电池10为机器人系统供电。蓄电池的电压经过升压器9后,从7伏的直流电压转换为3千伏高压,然后通过如图4所示的放电和充电回路,连接到静电吸附膜上。
[0074]
图4所示为充放电电路的一种优选实现,3千伏高压输入h通过继电器开关s1、s3、s5、s7、s9、s11分别连接到静电吸附膜m1、m2、m3、m4、m5、m6上,静电吸附膜另一端接地g,此为充电回路。放电回路是指继电器开关s2、s4、s6、s8、s10、s12同静电吸附膜m1、m2、m3、m4、m5、m6和地g构成放电回路。
[0075]
当继电器开关s1、s3、s5、s7、s9、s11闭合时,静电吸附膜充电产生吸附力。当继电器开关s1、s3、s5、s7、s9、s11打开,继电器开关s2、s4、s6、s8、s10、s12闭合时,静电吸附膜放电吸附力消失。每个继电器都被连接到扩展接口板12上,使每个吸附膜的充放电可通过单独控制与其相连的继电器的通断进行单独控制,保证了机器人足够的自由度。
[0076]
通过充放电回路控制吸附力的有无可以实时配合机器人的移动步态,当机器人足处于支撑状态时,吸附力存在;当机器人足处于移动状态时,吸附力消失。基于静电吸附原理实现足端对航天器的吸附,减小机器人抬腿所需的力矩,相比于其他吸附方式减少了因震动脱附航天器的风险。
[0077]
爬行机器人的自主移动控制流程如图5所示,选用intel的d435i深度相机,可同时提供rgb图像输入、深度图像输入、imu信息输入。基于深度图像信息计算栅格网络地图,对imu测量的角速度和加速度进行积分得到位姿估计结果,并用rgb信息矫正imu信息误差,目标信息可根据实际任务需求人为给定。路径规划算法选用启发式的a*算法,该算法是一种常用的路径查找和图形遍历算法,具有概率完备和搜索速度较快的优点。在搜索到最优路径后进行机器人逆运动学计算。
[0078]
图6为机器人单足的运动学模型,其中l1为57mm,l2为78mm,l3为56mm,结合机器人移动步态进行逆运动学计算,可快速得到舵机转动角度。
[0079]
为了计算机器人在航天器表面吸附所需的最小吸附力,我们在adams多体动力学仿真软件中,建立了如图7所示的机器人简化模型,为每个舵机转动轴所在定义了转动副,为足端与壁面间定义了接触力和预压力,并根据上述的机器人移动步态和逆运动学,实现了一种直行移动步态的仿真。仿真包含七个移动周期,每个移动周期机器人向前移动2cm。得到图8所示的机器人在壁面上爬行所需的摩擦力大小,(a)、(b)分别为x,y两个方向的摩擦力。结合计算结果和吸附膜的性能,在高压3千伏的条件下,选定机器人吸附膜直径为60mm。
[0080]
动力学仿真同时验证了机器人的移动性能,得到图9所示的机器人在主运动方向质心移动。可以看到机器人质心在7个移动周期中前进了14cm,能够稳定地完成预定任务。
[0081]
以上仅为本发明的实施实例,并非用于限定本发明的保护范围。凡在本发明的精
神和原则之内,不经过创造性劳动所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1