一种卫星在轨自主三轴快速机动控制方法与流程
1.本发明涉及航天器姿态确定控制技术领域,具体涉及一种卫星在轨自主三轴快速机动控制方法。
背景技术:
2.卫星进行海上搜救、灾后广域搜救、应急地理勘察等应急任务时,要求卫星快速的进行大角度姿态机动,而微小卫星的执行机构的力矩和角动量的大小是有限值的,卫星的角速度受限,需要在卫星约束下进行卫星的控制实现卫星的快速性。现有研究中,姿态的快速机动分为两个方向研究,一个方向为进行姿态规划,主要针对卫星仅存在侧摆机动的大角度机动情形进行姿态规划,实现卫星的快速侧摆,当卫星发生三轴机动时,不再适用。第二个方向为,设计基于欧拉轴转动的递阶饱和姿态控制律等新型控制方法,控制星体做绕欧拉轴的姿态机动,进行最短路径机动,但仍存在机动的快速性与稳定性的矛盾。
3.遥感卫星在轨长期运行在对日定向三轴稳定模式下,进行对地成像前,卫星需要进行三轴快速机动。根据卫星的转动惯量,执行机构的力矩与角动量约束,设计一种基于三轴姿态规划的方式,保证卫星在机动过程中旋转轴不变,为卫星的快速机动提供保证,并设计相应的控制算法可实现快速机动,同时解决快速性与稳定性的矛盾。
技术实现要素:
4.本发明为了实现卫星在轨自主快速成像,解决卫星需要三轴机动时快速性与稳定性的矛盾问题,提供一种卫星在轨自主三轴快速机动控制方法。
5.一种卫星在轨自主三轴快速机动控制方法,该方法由以下步骤实现:
6.步骤一、期望姿态计算;
7.根据卫星的初始姿态与目标姿态,计算期望四元数并计算卫星三轴机动对应的旋转轴与旋转角;获得期望四元数qq,期望旋转角θq和旋转轴方向en;
8.步骤二、三轴姿态规划;
9.在满足卫星转动惯量i、反作用飞轮力矩t和角动量h约束下,对三轴角加速度、角速度进行限幅和约束设置,获得角加速度限值α
lg
和角速度限值ω
lg
;并保证卫星三轴大角度机动过程中旋转轴方向不变,同时设计角加速度连续的八段式姿态规划器,以所述期望旋转角度θq,角加速度限值α
lg
,角速度限值ω
lg
作为输入,角加速度生成函数定义如下:
[0010][0011]
其中,δta为设定值,限定角加速度的上升时间,其值根据卫星执行机构的动态性能合理选择;δtb,δtc的值与期望角度θq的大小有关;
[0012]
通过所述姿态规划器获得实时规划角度θ∈[0,θq]、实时规划角速度和实时规划角加速度并获得规划四元数qg=[cosθ;sinθen],本体系三轴规划角速度和三轴规划角加速度
[0013]
步骤三、快速机动控制;
[0014]
步骤三一、计算偏差角速度ωe和偏差四元数qe;
[0015]
卫星的实时姿态相对规划后的姿态的旋转四元数,即偏差四元数其中,卫星惯性系下四元数q为卫星本体坐标系相对惯性系的旋转四元数;初始四元数qc为卫星的初始姿态相对惯性系的旋转四元数;
[0016]
卫星的实时角速度与规划后的角速度的偏差在惯性系下的表示即偏差角速度其中,轨道角速度ω
gui
为卫星轨道系相对惯性系的转动矢量在轨道系下的表示,卫星角速度ω为卫星本体系相对惯性系下的转动角速度;为轨道系相对卫星的初始姿态的旋转四元数;r(qe)为qe对应的旋转矩阵;为对应的旋转矩阵;
[0017]
步骤三二、将获得的偏差角速度ωe、偏差四元数qe以及三轴规划角加速度αg输入pd控制器,实现卫星在轨自主三轴快速机动控制;
[0018]
所述pd控制器设计为:
[0019]
u=kqα
g-k
pqe-kdωe[0020]
式中,kq,k
p
,kd分别为前馈控制增益矩阵,比例控制增量矩阵和微分控制增益矩阵。
[0021]
本发明的有益效果:
[0022]
现有卫星的快速机动控制主要针对卫星仅进行侧摆机动的成像模式,当卫星需要进行三轴机动时不再适用,本发明针对卫星三轴大角度机动的情形,设计了一种三轴姿态规划方案,在相同旋转角度下,缩短所需要的机动时间,提高卫星的机动性能,同时设计了快速机动算法,在实现卫星快速性的同时保证了稳定性。
[0023]
通过本发明的卫星在轨自主三轴快速机动控制后,针对海上搜救、灾后广域搜救、应急地理勘察等应急任务时,保证卫星快速获取数据,同时保证成像的稳定性,获取高质量图像数据。从而提高低轨遥感卫星的成像能力,确保了在轨采集的图像数据的高时效性。
附图说明
[0024]
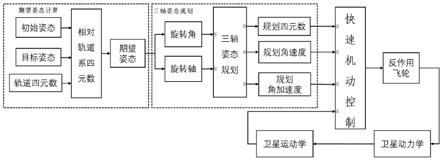
图1为本发明所述的一种卫星在轨自主三轴机动控制方法的控制原理图;
[0025]
图2为两坐标系间的旋转示意图;
[0026]
图3为三轴姿态规划图;
[0027]
图4为姿态规划器曲线效果图;其中,(a)为角加速度生成函数示意图,(b)为角速度效果图,(c)为角度效果图;
[0028]
图5为卫星姿态转换原理图;
[0029]
图6为期望与规划旋转角的仿真效果图;
[0030]
图7为pd-规划-控制角度效果图;其中,(a)、(b)、(c)分别为x轴角度、y轴角度和z轴角度的效果图;
[0031]
图8为pd-规划-控制角速度效果图;其中,(a)、(b)、(c)分别为x轴角速度、y轴角速度和z轴角速度的效果图;
[0032]
图9为偏差角度效果图;
[0033]
图10为偏差角速度效果图。
具体实施方式
[0034]
具体实施方式一、结合图1至图5说明本实施方式,一种卫星在轨自主三轴机动控制方法,该方法中,涉及如下定义:
[0035]
相关坐标系定义
[0036]
本实施方式中使用了本体坐标系obxbybzb,轨道坐标系obx
oyozo
和惯性系cex
eiyeizei
三种坐标系。
[0037]
(1)本体坐标系obxbybzb:坐标原点ob位于卫星质心处,三轴指向与星体安装有关,定义xb轴指向帆板方向,zb轴指向相机方向,yb轴与xb轴和zb轴构成右手直角坐标系。
[0038]
(2)轨道坐标系obx
oyozo
:坐标原点为卫星质心ob,y轴指向轨道角速度反方向,zo轴指向地球中心,xo轴与yo轴和zo轴构成右手直角坐标系(飞行方向),此坐标系为对地定向基准。
[0039]
(3)惯性系cex
eiyeizei
:坐标系原点为地球质心ce,x
ei
轴指向平春分点(2000年1月1日12时),z
ei
轴指向平北极(2000年1月1日12时,jd=2451545.0),y
ei
轴和x
ei
轴、z
ei
轴构成右手直角坐标系,也称j2000地球惯性坐标系。
[0040]
本实施方式中,卫星姿态采用四元数形式进行描述,相关性质定义如下:
[0041]
卫星姿态的描述方式,四元数表示:其中其中
[0042]
q0为四元数的标部,代表旋转角φ,为四元数的矢部,代表旋转轴的方向en=[i;j;k],满足i2+j2+k2=1。
[0043]
四个参数满足约束方程:
[0044]
矢量乘积规则:
[0045][0046]
四元数的逆:
[0047]
四元数乘法:
[0048]
本实施方式的具体实施步骤为:
[0049]
步骤一:期望姿态计算;
[0050]
由卫星的初始姿态与目标姿态,计算期望四元数并计算卫星三轴机动对应的旋转轴与旋转角。
[0051]
由四元数的定义可得到,初始坐标系oxyz相对目标坐标系ox’y’z’的姿态转换表示为如图2。
[0052]
卫星的目标姿态相对初始姿态的期望四元数为其中,初始四元数qc为卫星的初始姿态相对惯性系的旋转四元数;目标四元数qf为卫星的目标姿态相对惯性系的旋转四元数;
[0053]
由四元数的定义可知,由qq的标部q
q0
反向求得旋转角φ,φ=2arccos(q
q0
)。同时,由可得到
[0054]
当φ=0时,对应的四元数为qq=[1;0;0;0],目标姿态与初始姿态重合。
[0055]
步骤二:三轴姿态规划;
[0056]
根据卫星的性能约束对卫星的机动过程进行实时规划,通过姿态规划器产生一维的旋转角度,可提高卫星的机动能力。
[0057]
在满足卫星转动惯量i、反作用飞轮力矩t和角动量h约束下,为了实现初始四元数qc至目标四元数qf的旋转,即整个期望四元数qq的机动过程中均要保证旋转轴en的不变,在进行姿态规划时,需要对三轴角加速度、角速度进行限幅和约束设置。
[0058]
姿态规划器的输入和输出均为一维的,输入为期望旋转角度,角加速度限值,角速度限值,输出为实时角度,实时角速度和实时角加速度。三轴姿态规划图如图3。
[0059]
角加速度限值α
lg
的计算如下:
[0060][0061][0062]
α
lg
=||α
lg
||2;
[0063]
其中,卫星的转动惯量反作用飞轮三轴力矩t=[t
x
;ty;tz]n
·
m,m
max
=10
20
为一个设置的较大的数,规划角加速度限值α
lg
=[α
lgx
;α
lgy
;α
lgz
]
°
/s2,[
·
]
min
为求最小值运算,||
·
||2为求向量的模。
[0064]
输入三轴角速度限值ω
lim
=[ω
limx
;ω
limy
;ω
limz
]
°
/s;角速度限值ω
lg
的计算如下:
[0065][0066][0067]
ω
lg
=||ω
lg
||2;
[0068]
其中反作用飞轮角动量h=[h
x
;hy;hz]n
·m·
s,三轴规划角速度限值ω
lg
=[ω
lgx
;ω
lgy
;ω
lgz
]
°
/s。
[0069]
为规避了角加速度的突变问题,实现飞轮力矩的平稳变化,同时兼顾快速性,以期望旋转角度θq,角加速度限值α
lg
,角速度限值ω
lg
作为输入,设计一种角加速度连续的八段式姿态规划器,角加速度生成函数定义如下:
[0070][0071]
其中,δta为设定值,限定了角加速度的上升时间,可根据卫星执行机构的动态性能合理选择。δtb,δtc的值与期望角度θq的大小有关,δtb,δtc,具体计算过程如下:
[0072]
(1)当期望旋转角度时,规划角加速度的最大值达到α
lg
,规划角速度的最大值达到ω
lg
。。
[0073]
(2)当时,规划角加速度的最大值达到α
lg
,规划角速度的最大值未达到ω
lg
。δtb通过一元二次方程求解得到,
[0074]
(3)当时,规划角加速度的最大值未达到α
lg
,规划角速度的最大值未达到ω
lg
。机动角度θq对应的时间均为4δta。δtb=0,δtc=0,
[0075]
由机动角度θq=60
°
,角加速度限值α
lg
=0.1161
°
/s2,角速度限值ω
lg
=1.5
°
/s,δta=5s作为输入,由上述姿态规划器产生的简记为规划角速度和角度如图4所示。
[0076]
角加速度共8段,分为上升段2段,平稳段4段,下降段2段。其中,角加速度的上升段1、平稳段1和下降段1,对应角速度的上升段;角加速度的平稳段2对应角速度的平稳段;角加速度的上升段2、平稳段3和下降段2,对应角速度的下降段;角加速度的平稳段4的值为零,对应角速度的值也为零,角度值达到期望角度。
[0077]
由姿态规划器产生的实时规划角度θ∈[0,θq]、角速度和角加速度求解得到规划四元数qg=[cosθ;sinθen]、本体系三轴规划角速度三轴规划角加速度
[0078]
步骤三:快速机动控制
[0079]
刚体卫星的动力学与运动学方程描述为::其中,u为控制力矩,s(
·
)为反对称矩阵,)为反对称矩阵,
[0080]
本发明中的卫星的机动控制中,对应的多个坐标系下的姿态与角速度转换图如图5所示;偏差角速度ωe和偏差四元数qe计算如下:
[0081]
轨道系相对卫星的初始姿态的旋转四元数其中,轨道四元数q
gui
为轨道系相对惯性系的旋转四元数;
[0082]
卫星的实时姿态相对规划后的姿态的旋转四元数,即偏差四元数其中,卫星惯性系下四元数q为卫星本体坐标系相对惯性系的旋转四元数;
[0083]
卫星的实时角速度与规划后的角速度的偏差在惯性系下的表示即偏差角速度其中,轨道角速度ω
gui
为卫星轨道系相对惯性系的转动矢量在轨道系下的表示,卫星角速度ω为卫星本体系相对惯性系下的转动角速度。
[0084]
r(qe)为qe对应的旋转矩阵,为对应的旋转矩阵。
[0085]
为了进一步提高卫星机动的快速性,在pd控制基础上增加前馈设计,控制器设计为:
[0086]
u=kqα
g-k
pqe-kdωe[0087]
其中,kq,k
p
,kd分别为前馈控制增益矩阵,比例控制增量矩阵和微分控制增益矩阵,kq=kqi,k
p
=k
p
i,kd=kdi,kq,k
p
,kd为大于0的增益矩阵系数。
[0088]
具体实施方式二、结合图6至图10说明本实施方式,本实施方式为采用具体实施方式一所述的一种卫星在轨自主三轴快速机动控制方法进行仿真验证实例,并将验证的结果与不进行路径规划的传统的pd控制方案进行对比,本实施方式的卫星与控制参数选取如
下:卫星转动惯量飞轮角动量h=[0.01;0.01;0.01]n
·m·
s;飞轮力矩t=[0.003;0.003;0.003]n
·
m;输入角速度限值ω
lim
=[1.2;1.3;1.1]
°
/s;前馈控制增益矩阵系数kq=0.75;比例控制增益矩阵系数k
p
=1.55;微分控制增益矩阵系数kd=1.5;卫星的初始姿态四元数为qc=[1;0;0;0];目标为对地成像,与轨道系重合,目标姿态为qf=q
gui
,初始角速度ωc=[0;0;0]
°
/s。
[0089]
pd控制方案中,u=-k
p1qed-k
d1
ω
ed
,ω
ed
=ω-r(qe)ω
gui
,k
p1
=k
p1
i,k
d1
=k
d1
i,比例控制增益矩阵系数k
p1
=0.12;微分控制增益矩阵系数k
d1
=0.58。
[0090]
由初始姿态到目标姿态需要的期望旋转角度为100.74
°
,由三轴姿态规划角度曲线如图6所示。pd控制方案的三轴姿态角、本实施方式的三轴姿态规划角度对应的三轴姿态角、本实施方式的规划后前馈控制方案的三轴姿态角(由四元数q按zyx顺序旋转得到欧拉角)如图7所示,分别对应pd控制、期望规划、规划控制标签中所示。相应的角速度如图8所示。本实施方式的偏差角度和偏差角速度如图9和图10所示。由图7和图8看出,在旋转相同角度下,本实施方式对应的方法所需要的时间更短。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1