一种直升机操纵系统运动控制律设计方法与流程
1.本发明属于直升机操纵系统领域,涉及直升机操纵系统运动控制律设计方法。
背景技术:
2.如图2所示,直升机的操纵系统包括动环、不动环、助力器和变距拉杆;助力器上端连接不动环,不动环与动环连接,动环通过小拉杆与变距拉杆连接,变距拉杆与桨叶连接。通过助力器的位移实现动环、不动环的运动,再通过变距拉杆实现桨叶的变距。
3.某直升机操纵系统助力器采用120度布局方式,这种布局方式引起直升机需要助力器协调一起完成纵横向的变距。由于计算机需要给每个助力器运动发送指令,因此需要解算出每个助力器的运动律。
技术实现要素:
4.发明目的:提供一种直升机操纵系统运动控制律设计方法,根据桨叶变距解算出助力器的位移,得到3台助力器的运动律。
5.技术方案:
6.提供一种直升机操纵系统运动控制律设计方法,所述方法包括:
7.步骤1:分别在动环、不动环和桨叶旋转盘上建立虚拟变距轴;
8.步骤2:计算桨叶在横向虚拟变距轴上的偏转角为θ时,变距拉杆在桨叶旋转盘的虚拟变距轴的行程;
9.由于变距拉杆和动环由同一小拉杆连接,小拉杆在动环虚拟变距轴的行程与变距拉杆在桨叶旋转盘的虚拟变距轴的行程一样;
10.步骤3:假设不动环半径为r1、动换半径为r2,根据动环到不动环的传动比和小拉杆在动环虚拟变距轴的行程,计算出不动环在不动环虚拟变距轴上的行程s;
11.步骤4:根据不动环在不动环虚拟变距轴上的行程s,计算桨叶偏转θ角时,助力器的行程。
12.进一步地,不动环的虚拟变距轴分为横向变距轴和纵向变距轴;当旋翼做横向变距时,横向变距轴绕纵向变距轴旋转。
13.进一步地,假设前助力器到纵向变距轴的角度为φ;步骤4中,当不动环在不动环虚拟变距轴上的行程为s时,前助力器的行程为s*sin(φ)。
14.进一步地,步骤3中,不动环在不动环虚拟变距轴上的行程s的计算公式为s=θ/180*π*r*r1/r2;r为变距拉杆到桨叶旋转中心的距离。
15.进一步地,假设前助力器分别与左助力器、右助力器的夹角为120度;桨叶偏转θ角时,左助力器的行程为:s*sin(120
°‑
φ)。
16.进一步地,桨叶偏转θ角时,右助力器的行程为:s*sin(60
°‑
φ)。
17.进一步地,其特征在于,动环、不动环和桨叶旋转盘虚拟变距轴的横向变距轴在同一垂面内,且方向一致;动环、不动环和桨叶旋转盘虚拟变距轴的纵向变距轴在同一垂面
内,且方向一致。
18.进一步地,步骤4中,假设助力器做无转动的直线运动
19.技术效果:
20.本发明从桨叶到自动倾斜器最后到助力器进行运动分解,最后得出助力器的运动控制律;通过与实测值进行对比,满足直升机作动器实际运动情况。
附图说明
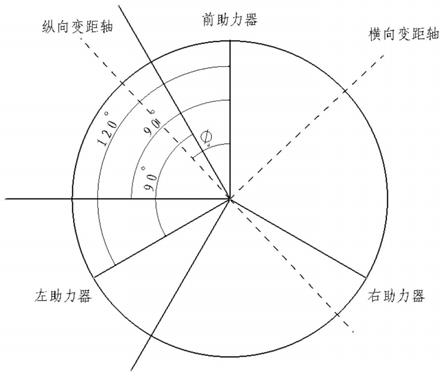
21.图1为本方法在某直升机助力器布置及虚拟变距轴位置示意图;
22.图2为桨叶变距轴示意图。
具体实施方式
23.本实施例,提供一种直升机操纵系统运动控制律设计方法,助力器行程解算步骤如下:
24.第一步:建立虚拟变距轴,如图1为不动环的纵向及横向变距轴,虚拟轴是依据自动倾斜器的提前操纵角设计的。
25.本实施例,分别在动环、不动环和桨叶旋转盘上建立虚拟变距轴;动环、不动环和桨叶旋转盘虚拟变距轴的横向变距轴在同一垂面内,且方向一致,三者可以投影为一条直线。
26.动环、不动环和桨叶旋转盘虚拟变距轴的纵向变距轴在同一垂面内,且方向一致,三者可以投影为一条直线。
27.第二步:假设桨叶偏转θ,变距拉杆到桨叶的距离为r,图2根据角度与弧度的关系可以得出操纵桨叶的操纵点的行程为θ/180*π*r,此行程也为小拉杆在动环虚拟变距轴的行程。
28.第三步:假设不动环半径r1,动换半径r2,根据动环和不动环的传动比和小拉杆在动环虚拟变距轴的行程,计算出虚拟变距轴在不动环操纵点的行程s=θ/180*π*r*r1/r2。
29.第四步:根据虚拟变距轴在不动换的操纵点行程折算三台助力器的行程:
30.假设前助力器到纵向变距轴的角度为φ;当不动环在不动环虚拟变距轴上的行程为s时,前助力器的行程为s*sin(φ)。
31.假设前助力器分别与左助力器、右助力器的夹角为120度;桨叶偏转θ角时,左助力器的行程为:s*sin(120
°‑
φ);
32.桨叶偏转θ角时,右助力器的行程为:s*sin(60
°‑
φ)。
33.本发明通过该运动控制律的解算可以解算出每台助力器的运动规律,经过与实际测量值进行比较误差较小;有效解决机械操纵系统改电传操纵系统的难点,该方法可以推广到90度助力器布置甚至任意角度布置方式。
技术特征:
1.一种直升机操纵系统运动控制律设计方法,其特征在于,所述方法包括:步骤1:分别在动环、不动环和桨叶旋转盘上建立虚拟变距轴;步骤2:计算桨叶在横向虚拟变距轴上的偏转角为θ时,变距拉杆在桨叶旋转盘的虚拟变距轴的行程;由于变距拉杆和动环由同一小拉杆连接,小拉杆在动环虚拟变距轴的行程与变距拉杆在桨叶旋转盘的虚拟变距轴的行程一样;步骤3:假设不动环半径为r1、动换半径为r2,根据动环到不动环的传动比和小拉杆在动环虚拟变距轴的行程,计算出不动环在不动环虚拟变距轴上的行程s;步骤4:根据不动环在不动环虚拟变距轴上的行程s,计算桨叶偏转θ角时,助力器的行程。2.根据权利要求1所述的控制律设计方法,其特征在于,不动环的虚拟变距轴分为横向变距轴和纵向变距轴;当旋翼做横向变距时,横向变距轴绕纵向变距轴旋转。3.根据权利要求2所述的控制律设计方法,其特征在于,假设前助力器到纵向变距轴的角度为φ;步骤4中,当不动环在不动环虚拟变距轴上的行程为s时,前助力器的行程为s*sin(φ)。4.根据权利要求3所述的控制律设计方法,其特征在于,步骤3中,不动环在不动环虚拟变距轴上的行程s的计算公式为s=θ/180*π*r*r1/r2;r为变距拉杆到桨叶旋转中心的距离。5.根据权利要求3所述的控制律设计方法,其特征在于,假设前助力器分别与左助力器、右助力器的夹角为120度;桨叶偏转θ角时,左助力器的行程为:s*sin(120
°‑
φ)。6.根据权利要求3所述的控制律设计方法,其特征在于,桨叶偏转θ角时,右助力器的行程为:s*sin(60
°‑
φ)。7.根据权利要求1所述的控制律设计方法,其特征在于,动环、不动环和桨叶旋转盘虚拟变距轴的横向变距轴在同一垂面内,且方向一致;动环、不动环和桨叶旋转盘虚拟变距轴的纵向变距轴在同一垂面内,且方向一致。8.根据权利要求1所述的控制律设计方法,其特征在于,步骤4中,假设助力器做无转动的直线运动。
技术总结
本发明涉及直升机操纵系统运动控制律设计方法。包括:步骤1:分别在动环、不动环和桨叶旋转盘上建立虚拟变距轴;步骤2:计算桨叶在横向虚拟变距轴上的偏转角为θ时,变距拉杆在桨叶旋转盘的虚拟变距轴的行程;由于变距拉杆和动环由同一小拉杆连接,小拉杆在动环虚拟变距轴的行程与变距拉杆在桨叶旋转盘的虚拟变距轴的行程一样;步骤3:根据动环到不动环的传动比和小拉杆在动环虚拟变距轴的行程,计算出不动环在不动环虚拟变距轴上的行程S;步骤4:根据不动环在不动环虚拟变距轴上的行程S,计算桨叶偏转θ角时,助力器的行程。本发明根据桨叶变距解算出助力器的位移,得到3台助力器的运动律。运动律。运动律。
技术研发人员:刘海清 焉台郎 史盼盼 黄丹
受保护的技术使用者:中国直升机设计研究所
技术研发日:2021.11.19
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1