滚翼飞行器的传动装置的制作方法
1.本实用新型属于航空技术领域,涉及一种滚翼飞行器的传动装置。
背景技术:
2.滚翼飞行器是一种以摆线桨为主要升力源的飞行器,最早由美国人caldwell于1923年提出,但一直以来未取得实质性的进展;近年来,由于空气动力学理论的进步,能够为摆线桨进行精确地气动力计算模型;碳纤维复合材料的普及为满足摆线桨苛刻的结构强度/刚度与重量的需求;微小型化的飞控系统具备了强大的操稳计算能力;锂聚合物电池和微型无刷电机的出现为滚翼机研究提供了强劲的核心;这些都为滚翼机的发展提供了理论及技术基础,开始出现微小型滚翼机的成功案例。
3.但由于滚翼飞行器的升力主要由周期摆动的摆线桨提供升力,对摆线桨的传动结构设计提出了较高的要求,目前出现的滚翼机传动主要以偏心轮为主,其动力提升与调节均存在缺陷,无法精确控制摆线桨的升力方向,且在传动过程中会出现周期性振动,影响滚翼机的操控性和稳定性,降低了摆线桨升力效率。
技术实现要素:
4.本实用新型提供了一种滚翼飞行器的传动装置,缓解了现有滚翼飞行器的传动装置以偏心轮为主,其动力提升与调节均存在缺陷的问题。
5.本实用新型提供一种滚翼飞行器的传动装置,包括:至少一个桨叶11、至少一个连杆2、支撑轮3、行星齿轮组件5、可调齿轮盘7和动力输入轴8;行星齿轮组件5包括太阳轮1a、三个行星齿轮1b、外齿轮环1c,太阳轮1a与三个行星齿轮1b相互啮合,三个行星齿轮1b与外齿轮环1c啮合;其中,
6.各桨叶11铰接在支撑轮3上,支撑轮3的内环内安装有行星齿轮组件5,并随行星齿轮组件5的外齿轮环1c的转动而转动,支撑轮3的中心与太阳轮1a的中心重合;
7.太阳轮1a和可调齿轮盘7穿设在动力输入轴8上,可调齿轮盘7靠近动力输入轴8设置,动力输入轴8带动太阳轮1a转动;
8.可调齿轮盘7上设置有三个行星齿轮1b的三个调节轴,各连杆2的一端均连接在一个调节轴上,各连杆2的另一端分别连接一个桨叶11,可调齿轮盘7用于调整桨叶11的俯仰角度。
9.可选的,各桨叶11呈翼型。
10.可选的,滚翼飞行器的传动装置还包括:至少一个桨叶轴44;
11.支撑轮3上设置有轴孔,各桨叶轴44穿设在轴孔内连接支撑轮3和桨叶11。
12.可选的,滚翼飞行器的传动装置还包括:固定支架6;
13.固定支架6穿设在动力输入轴8上,并设置在太阳轮1a和可调齿轮盘7之间;
14.固定支架6上设置有各调节轴的限位槽。
15.可选的,可调齿轮盘7上设置有调节耳,调节耳与滚翼飞行器的姿态调节器连接;
16.姿态调节器用于调节调节耳,控制连接有连杆2的调节轴相对动力输入轴8的角度。
17.可选的,每个桨叶11与支撑轮3的铰接轴与桨叶11与连杆2的连接轴平行。
18.本实用新型提供了一种滚翼传动装置,桨叶1通过横向穿过桨叶1的铰链均布安装于支撑轮上,连杆铰接于行星轮轴上,在行星齿轮组件带动支撑轮旋转时同时带动连杆转动,通过转动中心的偏差带动各个桨叶1进行俯仰运动,从而在某方向上产生矢量升力;作为滚翼传动核心采用行星齿轮结构,体积小、承载能力大,工作平稳,传动输入输出灵活,通过动力输入轴将扭矩从太阳轮输入、外齿圈输出,带动支撑轮与桨叶1旋转,且通过可调齿轮盘对行星轮位置进行调节,改变连杆中心位置,相应从而达到对滚翼的矢量升力方向进行操纵的目的,操纵灵活可靠。
附图说明
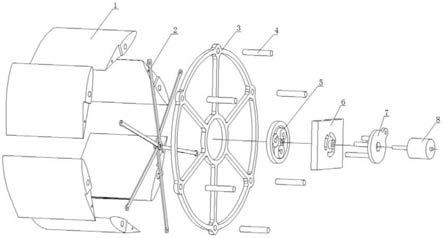
19.图1为本实用新型提供的滚翼装置的分解示意图;
20.图2为本实用新型提供的滚翼装置的结构示意图一;
21.图3为本实用新型提供的滚翼装置的结构示意图二;
22.图4为本实用新型提供的固定支架的结构示意图;
23.图5为本实用新型提供的可调节齿轮盘的结构示意图;
24.图6为本实用新型提供的行星齿轮组件的结构示意图;
25.附图标记说明:
26.1—桨叶;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—连杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3—支撑轮;
27.4—桨叶轴;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5—行星齿轮组件;
ꢀꢀꢀꢀꢀꢀ
6—固定支架;
28.7—可调齿轮盘;
ꢀꢀꢀꢀꢀꢀ
8—动力输入轴;
ꢀꢀꢀꢀꢀꢀꢀꢀ
1a—太阳轮;
29.1b—行星轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1c—外齿轮环。
具体实施方式
30.图1为本实用新型提供的滚翼装置的分解示意图,图2为本实用新型提供的滚翼装置的结构示意图一,图3为本实用新型提供的滚翼装置的结构示意图二,参照图1
‑
3,滚翼传动装置,包括多个桨叶1、多个连杆2、支撑轮3、桨叶轴4、行星齿轮组件5、固定支架6、可调齿轮盘7和级动力输入轴8;行星齿轮组件包括太阳轮1a、3个行星轮1b、外齿轮环1c构成。
31.其中,桨叶1呈翼型,桨叶1端面设置两个转轴,分为前部转轴与后部转轴;前部转轴用于桨叶1与支撑轮3连接;多个桨叶1通过前部转轴对称或非对称铰接安装于支撑轮3上;桨叶1后部转轴分别与带孔连杆连接,用于调整桨叶1的俯仰运动;支撑轮3外环相应设置与桨叶1数量相同的轴孔。
32.支撑轮3内环中央安装行星齿轮组件5,支撑轮3与行星齿轮组件5外齿环形成固连结构;支撑轮3中心与行星齿轮中心重合;行星齿轮组件5中心太阳轮为动力输入端,将扭矩通过齿轮啮合传递至行星轮,再传递至外齿环,外齿环带动支撑轮3同步旋转运动。
33.图4为本实用新型提供的固定支架6的结构示意图,图5为本实用新型提供的可调节齿轮盘的结构示意图,图6为本实用新型提供的行星齿轮组件5的结构示意图,如图4
‑
6所示,各个桨叶1后部连接的连杆另一端集中与行星齿轮中其一转轴相连;在行星齿轮组件5
带动支撑环旋转时,连杆中心相对支撑轮3中心产生高低差异,从而带动桨叶1产生俯仰运动,连杆中心位置的选择是滚翼组件产生矢量升力的决定条件;为满足矢量升力方向的调整的目的,设置了可调齿轮轴盘,盘上设置三个转轴,用于3行星齿轮安装,其中一个转轴较长,同时用于连杆的安装;轴盘底座与固定支架6相连,中心与支架上中心转轴重合,可绕支架中心带动行星轮及连杆进行转动调节。
34.固定支架6中心设置圆孔通过孔用于动力输入轴8与行星齿轮组件5太阳轮固连;同时设置中心轴环及三个弧形槽及,作为可调齿轮轴座旋转及调节空间。
35.本实用新型所设计的滚翼传动装置,通过动力输入轴8将扭矩从行星齿轮组件太阳轮输入,通过行星轮传递至外齿环,外齿环带动支撑轮3与桨叶1旋转;旋转过程中,通过可调齿轮盘7对行星轮位置进行调节,改变连杆中心位置,达到对滚翼的矢量升力方向进行操纵的目的。
技术特征:
1.一种滚翼飞行器的传动装置,其特征在于,包括:至少一个桨叶(1)、至少一个连杆(2)、支撑轮(3)、行星齿轮组件(5)、可调齿轮盘(7)和动力输入轴(8);所述行星齿轮组件(5)包括太阳轮(1a)、三个行星齿轮(1b)、外齿轮环(1c),所述太阳轮(1a)与所述三个行星齿轮(1b)相互啮合,所述三个行星齿轮(1b)与所述外齿轮环(1c)啮合;其中,各所述桨叶(1)铰接在所述支撑轮(3)上,所述支撑轮(3)的内环内安装有所述行星齿轮组件(5),并随所述行星齿轮组件(5)的外齿轮环(1c)的转动而转动,所述支撑轮(3)的中心与所述太阳轮(1a)的中心重合;所述太阳轮(1a)和所述可调齿轮盘(7)穿设在所述动力输入轴(8)上,所述可调齿轮盘(7)靠近所述动力输入轴(8)设置,所述动力输入轴(8)带动所述太阳轮(1a)转动;所述可调齿轮盘(7)上设置有所述三个行星齿轮(1b)的三个调节轴,各所述连杆(2)的一端均连接在一个所述调节轴上,各所述连杆(2)的另一端分别连接一个所述桨叶(1),所述可调齿轮盘(7)用于调整所述桨叶(1)的俯仰角度。2.根据权利要求1所述的传动装置,其特征在于,还包括:至少一个桨叶轴(4);所述支撑轮(3)上设置有轴孔,各所述桨叶轴(4)穿设在所述轴孔内连接所述支撑轮(3)和所述桨叶(1)。3.根据权利要求1所述的传动装置,其特征在于,还包括:固定支架(6);所述固定支架(6)穿设在所述动力输入轴(8)上,并设置在所述太阳轮(1a)和所述可调齿轮盘(7)之间;所述固定支架(6)上设置有各所述调节轴的限位槽。4.根据权利要求1所述的传动装置,其特征在于,所述可调齿轮盘(7)上设置有调节耳,所述调节耳与滚翼飞行器的姿态调节器连接;所述姿态调节器用于调节所述调节耳,控制连接有所述连杆(2)的调节轴相对所述动力输入轴(8)的角度。5.根据权利要求1所述的传动装置,其特征在于,每个所述桨叶(1)与所述支撑轮(3)的铰接轴与所述桨叶(1)与所述连杆(2)的连接轴平行。6.根据权利要求1所述的传动装置,其特征在于,各所述桨叶(1)呈翼型。
技术总结
本实用新型提供一种滚翼飞行器的传动装置,桨叶通过横向穿过桨叶的铰链均布安装于支撑轮上,连杆铰接于行星轮轴上,在行星齿轮组件带动支撑轮旋转时同时带动连杆转动,通过转动中心的偏差带动各个桨叶进行俯仰运动,从而在某方向上产生矢量升力;作为滚翼传动核心采用行星齿轮结构,体积小、承载能力大,工作平稳,传动输入输出灵活,通过动力输入轴将扭矩从太阳轮输入、外齿圈输出,带动支撑轮与桨叶旋转,且通过可调齿轮盘对行星轮位置进行调节,改变连杆中心位置,相应从而达到对滚翼的矢量升力方向进行操纵的目的,操纵灵活可靠。操纵灵活可靠。操纵灵活可靠。
技术研发人员:石鹏飞 刘斌 王通 冯立华 谭小辉 孙锐 秦存峰 贺宁龙 孙乐 李灼
受保护的技术使用者:陕西飞机工业有限责任公司
技术研发日:2021.03.26
技术公布日:2021/12/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1