一种农作物图像检测识别装置
1.本发明属于农业种植领域,具体为一种农作物图像检测识别装置。
背景技术:
2.农作物指农业上栽培的各种植物。包括粮食作物﹑经济作物(油料作物、蔬菜作物、花、草、树木)两大类,可食用的农作物是人类基本食物的来源之一,“人以食为天”,表达了人与食物的关系,合理的膳食搭配才能给人类带来健康,食物的自给自足,才是一个国家可持续性发展的基础,农作物的生长,离不开科学的科技生产技术,以及新型工业制造出来的能辅助农业生产的机械设备,由于农作物种植面积较大,从而使得农民们对农作物的状况无法准确知悉,现如今通过无人机和图像检测识别装置,对农作物的生长状况进行了解。
3.由于农作物种植密集,而无人机无法进入到农作物丛内进行移动,从而无法对农作物的根茎部位进行检测识别,从而造成检测范围较小。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本发明提供一种农作物图像检测识别装置,有效的解决了目前无法对农作物的根茎部位进行检测识别,从而造成检测范围较小的问题。
5.为实现上述目的,本发明提供如下技术方案:一种农作物图像检测识别装置,包括无人机,所述无人机的顶端等角度安装有机翼臂,机翼臂的顶端安装有机翼,无人机的顶端安装有升降检测组件,无人机的顶端安装有重心调节组件,无人机的顶端安装有镜头距离调节组件;
6.升降检测组件包括开设于无人机顶端的中部槽,中部槽的内部安装有气缸,气缸的顶端安装有气缸推杆,气缸推杆的顶端安装有顶部配重块,顶部配重块的两侧对称安装有侧板,两个侧板相互远离的一侧均等距开设有齿槽,齿槽的一侧啮合连接有齿轮,齿轮的外侧安装于齿轮座,齿轮座对称安装于无人机的顶端,无人机的两侧对称开设有贯穿槽,贯穿槽贯穿至无人机的上下两侧,贯穿槽的内部插接有升降托物单元。
7.优选的,所述升降托物单元包括插接于贯穿槽内部的移动板,移动板的一侧等距安装有齿牙,齿牙与齿轮相啮合,两个移动板之间安装有托板,托板位于无人机的下方。
8.优选的,所述重心调节组件包括开设于侧板内部的内槽,内槽贯穿至侧板的底端,内槽的内部插接有插杆,插杆的顶端安装有第一弹簧,第一弹簧的顶端与内槽的内顶壁固定连接,插杆的底端贯穿至侧板的下方,插杆的底端安装有磁铁,磁铁的底端安装有第一转座,第一转座的一侧转动连接有转板,转板的底端转动连接有移动杆。
9.优选的,所述无人机的顶端开设有滑槽,滑槽的内部滑动连接有滑块,滑块的顶端安装有移动配重块,移动杆对称安装于移动配重块的两侧。
10.优选的,所述磁铁的下方开设有安装槽,安装槽对称开设于无人机的顶端,安装槽的内部安装有电磁铁,磁铁的上方设有限位板,限位板与齿轮座固定连接,限位板的底端与
磁铁紧贴。
11.优选的,所述镜头距离调节组件包括安装于移动杆一侧的第二转座,第二转座的一侧转动连接有距离调节单元,距离调节单元的一侧转动连接有第三转座,第三转座的一侧安装有移动块,第三转座的另一侧安装有第三弹簧,第三弹簧的一端安装有固定板,固定板与无人机固定连接,移动板的内部开设有内腔,内腔的一侧贯穿至移动板内侧,内腔的内部滑动连接有移动板。
12.优选的,所述移动板的一侧安装有连接板,连接板的正面开设有移动槽,移动块滑动连接于移动槽内部。
13.优选的,两个所述移动板之间安装有安装板,安装板的顶端安装有检测相机,安装板的底端对称安装有导向块,导向块滑动连接于导向槽内部,导向槽对称开设于托板顶端。
14.优选的,所述距离调节单元包括安装于第二转座和第三转座之间的转动板,转动板的中部转动连接有中心转杆,中心转杆的底端与无人机固定连接,转动板的两端对称开设有侧槽,侧槽的内部插接有滑杆,滑杆的一端安装有第二弹簧,第二弹簧与侧槽内部固定连接,滑杆的另一端安装有转头,其中一个转头与第二转座转动连接,另一个转头与第三转座转动连接。
15.与现有技术相比,本发明的有益效果是:
16.(1)、本发明,通过开启气缸,使得气缸推动气缸推杆向上移动,继而使得顶部配重块带动侧板向上移动,使得齿槽带动齿轮转动后,带动升降托物单元向下移动,而安装板与升降托物单元上下同步移动,从而带动安装板上的检测相机向下移动,从而使得检测相机进入到农作物丛中,从而对农作物的根茎部分进行检测,从而提高检测范围;
17.(2)、该发明,通过电磁铁通电,使得电磁铁对磁铁产生吸引力,从而使得磁铁带动第一转座向下移动,此时第一转座转动后,推动移动杆移动,从而使得第二转座移动后,此时第二转座带动转动板绕着中心转杆转动,继而使得中心转杆另一端的转头带动第三转座反向移动,而第三转座与移动槽滑动连接,从而带动连接板底端的安装板移动,从而使得检测相机不断靠近农作物,从而使得检测图像更加清晰,从而方便判断农作物长势。
18.(3)、该发明,通过移动板带动检测相机相机向下移动时,使得设备的重心向下移动,此时在移动板向下移动的同时,顶部配重块向上移动,使得重心回移,从而使得设备的重心保持在无人机中部,从而提高无人机的飞行稳定性,当安装板横向移动时,此时移动杆移动,带动移动配重块朝着安装板的反向移动,从而使得无人机的重心稳定,从而提高无人机的飞行稳定性,继而提高图像拍摄的清晰度。
附图说明
19.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
20.在附图中:
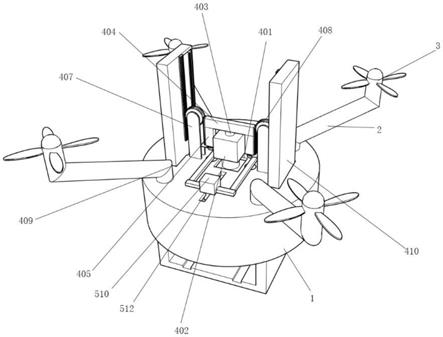
21.图1为本发明结构示意图;;
22.图2为本发明升降托物单元结构示意图;
23.图3为本发明移动板结构示意图;
24.图4为本发明升降检测组件结构示意图;
25.图5为本发明镜头距离调节组件结构示意图;
26.图6为本发明重心调节组件结构示意图;
27.图7为本发明无人机结构示意图。
28.图中:1、无人机;2、机翼臂;3、机翼;4、升降检测组件;401、中部槽;402、气缸;403、气缸推杆;404、顶部配重块;405、侧板;406、齿槽;407、齿轮座;408、齿轮;409、贯穿槽;410、升降托物单元;4101、移动板;4012、齿牙;4103、托板;5、重心调节组件;501、安装槽;502、电磁铁;503、内槽;504、第一弹簧;505、插杆;506、磁铁;507、第一转座;508、转板;509、移动杆;510、移动配重块;511、滑块;512、滑槽;513、限位板;6、镜头距离调节组件;601、第二转座;602、距离调节单元;6021、转动板;6022、中心转杆;6023、侧槽;6024、第二弹簧;6025、滑杆;6026、转头;603、第三转座;604、移动块;605、第三弹簧;606、内腔;607、移动板;608、连接板;609、移动槽;610、安装板;611、导向块;612、导向槽。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例一,由图1-图6给出,本发明包括无人机1,无人机1的顶端等角度安装有机翼臂2,机翼臂2的顶端安装有机翼3,无人机1的顶端安装有升降检测组件4,无人机1的顶端安装有重心调节组件5,无人机1的顶端安装有镜头距离调节组件6。
31.实施例二,在实施例一的基础上,升降检测组件4包括开设于无人机1顶端的中部槽401,中部槽401的内部安装有气缸402,气缸402的顶端安装有气缸推杆403,气缸推杆403的顶端安装有顶部配重块404,顶部配重块404的两侧对称安装有侧板405,两个侧板405相互远离的一侧均等距开设有齿槽406,齿槽406的一侧啮合连接有齿轮408,齿轮408的外侧安装于齿轮座407,齿轮座407对称安装于无人机1的顶端,无人机1的两侧对称开设有贯穿槽409,贯穿槽409贯穿至无人机1的上下两侧,贯穿槽409的内部插接有升降托物单元410,升降托物单元410包括插接于贯穿槽409内部的移动板4101,移动板4101的一侧等距安装有齿牙4102,齿牙4102与齿轮408相啮合,两个移动板4101之间安装有托板4103,托板4103位于无人机1的下方;
32.在使用时,开启机翼3,控制无人机1飞到需要检测的农作物上方,安装板610上方安装的检测将农作物图片传输至接收设备上,进行识别,从而判断农作物的长势情况,当需要对农作物的根茎部位进行图像检测识别时,无人机1无法向下飞行进入到农作物丛中,此时开启气缸402,从而使得气缸402推动气缸推杆403向上移动,继而使得顶部配重块404带动侧板405向上移动,继而使得齿槽406带动齿轮408转动后,带动升降托物单元410向下移动,而安装板610与升降托物单元410上下同步移动,从而带动安装板610上的检测相机向下移动,从而使得检测相机进入到农作物丛中,从而对农作物的根茎部分进行检测,从而提高检测范围。
33.实施例三,在实施例一的基础上,重心调节组件5包括开设于侧板405内部的内槽503,内槽503贯穿至侧板405的底端,内槽503的内部插接有插杆505,插杆505的顶端安装有
第一弹簧504,第一弹簧504的顶端与内槽503的内顶壁固定连接,插杆505的底端贯穿至侧板405的下方,插杆505的底端安装有磁铁506,磁铁506的底端安装有第一转座507,第一转座507的一侧转动连接有转板508,转板508的底端转动连接有移动杆509,无人机1的顶端开设有滑槽512,滑槽512的内部滑动连接有滑块511,滑块511的顶端安装有移动配重块510,移动杆509对称安装于移动配重块510的两侧,磁铁506的下方开设有安装槽501,安装槽501对称开设于无人机1的顶端,安装槽501的内部安装有电磁铁502,磁铁506的上方设有限位板513,限位板513与齿轮座407固定连接,限位板513的底端与磁铁506紧贴;
34.当检测相机拍摄图像不清楚时,此时电磁铁502通电,继而使得电磁铁502对磁铁506产生吸引力,从而使得磁铁506带动第一转座507向下移动,此时第一转座507转动后,推动移动杆509移动,从而使得第二转座601移动后,此时第二转座601带动转动板6021绕着中心转杆6022转动,继而使得中心转杆6022另一端的转头6026带动第三转座603反向移动,而第三转座603与移动槽609滑动连接,从而带动连接板608底端的安装板610移动,从而使得检测相机不断靠近农作物,从而使得检测图像更加清晰,从而方便判断农作物长势。
35.实施例四,在实施例一的基础上,镜头距离调节组件6包括安装于移动杆509一侧的第二转座601,第二转座601的一侧转动连接有距离调节单元602,距离调节单元602的一侧转动连接有第三转座603,第三转座603的一侧安装有移动块604,第三转座603的另一侧安装有第三弹簧605,第三弹簧605的一端安装有固定板,固定板与无人机1固定连接,移动板4101的内部开设有内腔606,内腔606的一侧贯穿至移动板4101内侧,内腔606的内部滑动连接有移动板607,移动板607的一侧安装有连接板608,连接板608的正面开设有移动槽609,移动块604滑动连接于移动槽609内部,两个移动板607之间安装有安装板610,安装板610的顶端安装有检测相机,安装板610的底端对称安装有导向块611,导向块611滑动连接于导向槽612内部,导向槽612对称开设于托板4103顶端,距离调节单元602包括安装于第二转座601和第三转座603之间的转动板6021,转动板6021的中部转动连接有中心转杆6022,中心转杆6022的底端与无人机1固定连接,转动板6021的两端对称开设有侧槽6023,侧槽6023的内部插接有滑杆6025,滑杆6025的一端安装有第二弹簧6024,第二弹簧6024与侧槽6023内部固定连接,滑杆6025的另一端安装有转头6026,其中一个转头6026与第二转座601转动连接,另一个转头6026与第三转座603转动连接;
36.当移动板4101带动检测相机相机向下移动时,使得设备的重心向下移动,此时在移动板4101向下移动的同时,顶部配重块404向上移动,使得重心回移,从而使得设备的重心保持在无人机1中部,从而提高无人机1的飞行稳定性,当安装板610横向移动时,此时移动杆509移动,带动移动配重块510朝着安装板610的反向移动,从而使得无人机1的重心稳定,从而提高无人机1的飞行稳定性,继而提高图像拍摄的清晰度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1