用于飞行器力纷争监控的方法和装置与流程
1.本发明涉及飞行器领域,尤其涉及用于飞行器力纷争监控的方法和装置。
背景技术:
2.在飞控系统中普遍应用多余度伺服作动器的控制形式,采用同一舵面由两个或更多个作动器并行主动控制的策略。舵面作动系统的整个伺服回路主要包括各种传感器、电液伺服阀和执行机构等。
3.在采用多个作动器同时控制一个舵面时,由于舵回路中各组件及其安装的制造公差导致各个作动器的响应有差异,从而几个作动器互相牵制产生纷争,这就是作动器间的“力纷争”现象。舵面力纷争是采用多余度作动器的飞控系统的固有特性,力纷争过大会对飞机舵面施加了额外的载荷,对舵面静强度有较大的影响。
4.因此,本领域需要一种有效的用于飞行器力纷争监控的方法和装置。
技术实现要素:
5.本发明提供了一种易实施、适用性强的高鲁棒性的力纷争监控方法和装置。通过将多个作动器之间的输出力差值和输出位移差同时作为力纷争监控器的输入信号,通过双通道分别进行力纷争监控,当两个通道的门限都被触发时,确定舵面发生力纷争,提高了力纷争监控器的鲁棒性。
6.根据本发明的一个实施例,提供了一种用于飞行器力纷争监控的装置,其包括:第一作动器以及与第一作动器相关联的第一力传感器和第一位置传感器,所述第一作动器通过第一作动杆驱动所述飞行器的舵面,所述第一力传感器被配置成检测所述第一作动器施加于所述第一作动杆的第一输出力并且所述第一位置传感器被配置成检测所述第一作动杆的第一位移;第二作动器以及与第二作动器相关联的第二力传感器和第二位置传感器,所述第二作动器通过第二作动杆驱动所述舵面,所述第二力传感器被配置成检测所述第二作动器施加于所述第二作动杆的第二输出力并且所述第二位置传感器被配置成检测所述第二作动杆的第二位移;以及力纷争监控器,所述力纷争监控器被配置成在所述第一输出力与所述第二输出力之间的输出力差值大于第一阈值并且所述第一位移与所述第二位移之间的位移差大于第二阈值时,确定所述舵面发生力纷争。
7.在一方面,所述第一作动器和所述第二作动器中的每一者包括腔体和安装在所述腔体中的活塞,所述第一作动杆和所述第二作动杆分别连接至所述第一作动器和所述第二作动器的活塞,其中所述活塞将所述腔体分为两个腔,所述第一输出力和所述第二输出力中的每一者包括由对应的活塞分开的所述两个腔之间的压力差。
8.在一方面,所述舵面包括扰流板、副翼、方向舵、或升降舵。
9.在一方面,所述力纷争监控器还被配置成将所述位移差乘以系数以生成转换力值,将所述转换力值与所述输出力差值进行比较,如果所述转换力值与所述输出力差值相差大于第三阈值,则发出力传感器故障信号。
10.在一方面,所述力纷争监控器响应于所述力传感器故障信号而抑制针对所述舵面的力纷争监控。
11.在一方面,响应于所述舵面发生力纷争,使所述第一作动器或所述第二作动器中的一者或两者抑制驱动所述舵面。
12.根据本发明的一个实施例,提供了一种用于飞行器力纷争监控的方法,其包括:接收第一作动器的第一输出力和第一位移,其中所述第一作动器通过第一作动杆驱动所述飞行器的舵面,所述第一输出力表示所述第一作动器施加于所述第一作动杆的第一输出力并且所述第一位移表示所述第一作动杆的第一位移;接收第二作动器的第二输出力和第二位移,其中所述第二作动器通过第二作动杆驱动所述舵面,所述第二输出力表示所述第二作动器施加于所述第二作动杆的第二输出力并且所述第二位移表示所述第二作动杆的第二位移;以及在所述第一输出力与所述第二输出力之间的输出力差值大于第一阈值并且所述第一位移与所述第二位移之间的位移差大于第二阈值时,确定所述舵面发生力纷争。
13.在一方面,所述第一作动器和所述第二作动器中的每一者包括腔体和安装在所述腔体中的活塞,所述第一作动杆和所述第二作动杆分别连接至所述第一作动器和所述第二作动器的活塞,其中所述活塞将所述腔体分为两个腔,所述第一输出力和所述第二输出力中的每一者包括由对应的活塞分开的所述两个腔之间的压力差。
14.在一方面,所述舵面包括扰流板、副翼、方向舵、或升降舵。
15.在一方面,所述用于飞行器力纷争监控的方法还包括:将所述位移差乘以系数以生成转换力值,将所述转换力值与所述输出力差值进行比较,如果所述转换力值与所述输出力差值相差大于第三阈值,则发出力传感器故障信号。
16.在一方面,所述用于飞行器力纷争监控的方法还包括:响应于所述力传感器故障信号而抑制针对所述舵面的力纷争监控。
17.在一方面,所述用于飞行器力纷争监控的方法还包括:响应于所述舵面发生力纷争,使所述第一作动器或所述第二作动器中的一者或两者抑制驱动所述舵面。
18.根据本发明的一个实施例,提供了一种飞行控制系统,其包括如上任一项所述的用于飞行器力纷争监控的装置。
附图说明
19.图1是根据本发明一个实施例的舵面力纷争示意图。
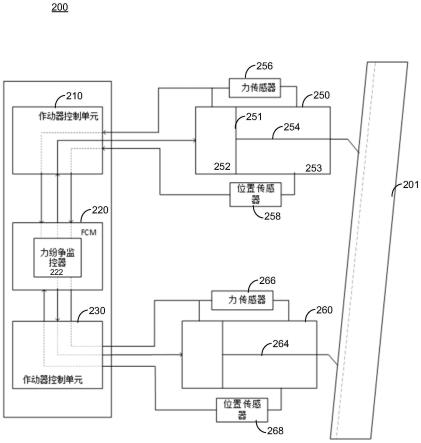
20.图2是根据本发明一个实施例的用于力纷争监控的装置的架构示意图。
21.图3是根据本发明一个实施例的力纷争监控器的逻辑示意图。
22.图4是根据本发明一个实施例的用于力纷争监控的方法的流程图。
具体实施方式
23.下面结合具体实施例和附图对本发明作进一步说明,但不应以此限制本发明的保护范围。
24.根据本发明的用于飞行器力纷争监控的装置可包括驱动舵面的第一作动器和第二作动器。第一作动器通过第一作动杆驱动该舵面,第一力传感器被配置成检测第一作动器施加于第一作动杆的第一输出力并且第一位置传感器被配置成检测第一作动杆的第一
位移。第二作动器通过第二作动杆驱动该舵面,第二力传感器被配置成检测第二作动器施加于第二作动杆的第二输出力并且第二位置传感器被配置成检测第二作动杆的第二位移。力纷争监控器被配置成在第一输出力与第二输出力之间的输出力差值大于第一阈值并且第一位移与第二位移之间的位移差大于第二阈值时,确定舵面发生力纷争。
25.图1是根据本发明一个实施例的舵面力纷争示意图。图1示出了飞行器的舵面101以及驱动该舵面的两个作动器110、120。两个作动器110、120响应于来自飞控计算机的舵面位置指令而分别生成输出力f1、输出力f2,从而驱动舵面101运动。由于用于控制同一个舵面101的两个作动器110、120的响应差异、安装间隙和舵面扭转刚度等,导致与舵面101相关联的作动器110、120输出的力f1、f2不一致,从而产生“力纷争”现象。
26.舵面力纷争是采用多余度作动器的飞控系统的固有特性,力纷争过大会对飞机舵面施加了额外的载荷,对舵面静强度有较大的影响。根据本发明的实施例,飞控系统可通过设置力纷争监控器对静态力纷争进行监控、故障隔离。
27.图2是根据本发明一个实施例的用于力纷争监控的装置200的架构示意图。用于力纷争监控的装置200可包括用于驱动舵面201的第一作动器250、第二作动器260以及力纷争监控器222。作为示例而非限定,图2示出了力纷争监控器222作为飞控计算机(fcm)220的一部分。在其他实施例中,力纷争监控器222可以作为单独的设备存在,或者可以与飞机上的合适的电子设备相集成。飞控计算机220和力纷争监控器222各自可采用计算机、处理器、集成电路、可编程逻辑器件、微处理器、控制器、微控制器、或状态机等来实现。
28.飞控计算机220传输舵面位置指令给第一作动器控制单元210和第二作动器控制单元230,第一作动器控制单元210基于该舵面位置指令发送作动器位置指令信号给第一作动器250以驱动舵面201,且第二作动器控制单元230基于该舵面位置指令发送作动器位置指令信号给第二作动器260以驱动舵面201。第一作动器250和第二作动器260可驱动同一个舵面201的不同部位。舵面201可以是例如扰流板、副翼、方向舵、升降舵等。
29.第一作动器250、第二作动器260可以各自是电液伺服作动器。作为示例而非限定,图2示出了第一作动器250是电液伺服作动器,其可包括安装在腔体中的活塞251,活塞251将腔体分为两个腔252和253,两个腔252和253中可填充液体。活塞251连接至第一作动杆254,第一作动杆254的输出端连接至舵面201。第一作动器250接收到来自第一作动器控制单元210的控制命令时,根据该控制命令来调整两个腔252和253中的液体含量,从而导致两个腔252和253产生压力差,该压力差使得活塞251运动,从而带动第一作动杆254运动并相应地驱动舵面201运动。
30.第二作动器260可具有与第一作动器250类似的腔体和活塞结构,并通过第二作动杆264驱动舵面201运动。
31.根据本发明的实施例,第一作动器250具有相关联的第一力传感器256和第一位置传感器258,其中第一力传感器256被配置成检测第一作动器250施加于第一作动杆254的第一输出力,并且第一位置传感器258被配置成检测第一作动杆254的第一位移。
32.第二作动器260具有相关联的第二力传感器266和第二位置传感器268,其中第二力传感器266被配置成检测第二作动器260施加于第二作动杆264的第二输出力,并且第二位置传感器268被配置成检测第二作动杆264的第二位移。
33.由第一力传感器256和第一位置传感器258检测到的信息可通过第一作动器控制
单元210提供给力纷争监控器222,由第二力传感器266和第二位置传感器268检测到的信息可通过第二作动器控制单元230提供给力纷争监控器222。根据本发明的一个实施例,力纷争监控器222可被配置成在第一输出力与第二输出力之间的输出力差值大于第一阈值并且第一位移与第二位移之间的位移差大于第二阈值时,确定舵面201发生力纷争。例如,力纷争监控器222可向飞控计算机220提供指示舵面发生力纷争的信号。响应于舵面发生力纷争的信号,飞控计算机220可发出舵面抑制信号,例如使第一作动器250或第二作动器260中的一者或两者抑制驱动舵面201。
34.在使用电液伺服作动器的实施例中,力传感器256和266可被实现为压力传感器,其可以检测由活塞分开的两个腔的压力,检测到的两腔压力可通过作动器控制单元210、230传递给飞控计算机220或力纷争监控器222。在飞控计算机220或力纷争监控器222中,可根据压力传感器的数据计算单个作动器的两腔压力差(delta pressure,dp),即得到对应作动器的输出力。进一步地,飞控计算机220或力纷争监控器222可计算两个作动器的输出力之间的输出力差值(difference delta pressure,ddp)。
35.在一个实施例中,力纷争监控器222还可被配置成将两个作动器之间的位移差乘以系数以生成转换力值,将该转换力值与两个作动器之间的输出力差值进行比较。如果转换力值与输出力差值相差大于第三阈值,则力纷争监控器222可发出力传感器故障信号。在一个实施例中,响应于力传感器故障信号,飞控计算机220或力纷争监控器222可抑制针对舵面201的力纷争监控。
36.如上,本发明提供了一种多源输入高鲁棒性的力纷争监控器设计,该监控器分别通过作动器输出力和作动器位移对舵面力纷争进行监控,只有在两个监控通道的门限都被触发时,舵面力纷争监控器才会触发。这种双通路的监控形式,减少了因力纷争监控器的误触发而导致单个舵面失效,提高了监控器的鲁棒性和飞机操纵性能。同时,根据本发明的力纷争监控器的设计可以防止舵面因过度变形导致疲劳和力纷争等问题。
37.图3是根据本发明一个实施例的力纷争监控器的逻辑示意图。力纷争监控器可实现为飞控计算机的一部分,或者单独地实现。例如,力纷争监控器可采用计算机、处理器、集成电路、可编程逻辑器件、微处理器、控制器、微控制器、或状态机等来实现。
38.力纷争监控器接收由作动器控制单元(ace)传输的内侧作动器(ib)两腔压力信号301、302,外侧作动器(ob)的两腔压力信号303、304,内侧作动器位移信号305,外侧作动器位移信号306。然后力纷争监控器分别对作动器输出力和位移信号进行判断:
39.1)力纷争监控器对内侧作动器的两腔压力信号301、302作差取绝对值得到内侧作动器的两腔压力差,即内侧作动器的输出力308;对外侧作动器的两腔压力信号303、304作差取绝对值得到外侧作动器的两腔压力差,即外侧作动器的输出力309;然后对输出力308、309进行作差得到输出力差值(ddp)310。当ddp 310大于设置门限值(constant1)311且持续指定时间,则判断为真,判断信号312为1;
40.2)力纷争监控器对两个作动器的位移信号305、306进行作差求绝对值,得到位移差313,当位移差313大于门限值(constant2)314且持续一定时间,则判断为真,判断信号315为1;
41.3)飞控系统的系统监控器抑制信号307进行取非运算得到信号316,将力纷争监控器的判断信号312、315、和信号316进行与门计算,故只有当输出力差值、位移差都达到相应
的门限,且系统监控器没被抑制,此时力纷争监控器会触发故障信号,输出舵面发生力纷争的信号317(故障标志fault flag被置位);
42.4)如果位移差信号313大于门限值(constant2)314,将位移差信号313乘以系数k以生成转换力值,将该转换力值与输出力差值310进行比较,如果该转换力值与输出力差值310相差大于阈值(例如,持续一定时间),则发出力传感器故障信号318(pressure fault flag被置位)。该转换力值与输出力差值310相差大于阈值可指示力传感器可能有故障。响应于力传感器故障信号318,可抑制力纷争监控。系数k可以是预配置的常数,例如其可以是基于作动器的输出力与输出位移之间的关系来确定的。在不同的实施例中,可以使用不同的系数k。由此,由于位置传感器(例如lvdt)的信号完整性更高,从而可以对力传感器的数据进行异源交叉验证,检测力传感器故障。
43.图4是根据本发明一个实施例的用于力纷争监控的方法400的流程图。该方法可使用如上文描述的飞控系统或力纷争监控器、或处理器、集成电路、可编程逻辑器件、微处理器、控制器、微控制器、或状态机等来实现。用于力纷争监控的方法400可自动执行或者可响应于激活操作而执行。
44.在步骤402,可接收第一作动器的第一输出力和第一位移,其中第一作动器通过第一作动杆驱动飞行器的舵面,第一输出力表示第一作动器施加于第一作动杆的第一输出力并且第一位移表示第一作动杆的第一位移。如上所述,第一力传感器可被配置成检测第一作动器施加于第一作动杆的第一输出力并且第一位置传感器可被配置成检测第一作动杆的第一位移。例如,舵面可包括扰流板、副翼、方向舵、或升降舵。
45.在步骤404,接收第二作动器的第二输出力和第二位移,其中第二作动器通过第二作动杆驱动该舵面,第二输出力表示第二作动器施加于第二作动杆的第二输出力并且第二位移表示第二作动杆的第二位移。如上所述,第二力传感器可被配置成检测第二作动器施加于第二作动杆的第二输出力并且第二位置传感器可被配置成检测第二作动杆的第二位移。例如,第一作动杆和第二作动杆中的每一者可连接至安装在腔体中的活塞,活塞将腔体分为两个腔,第一输出力和第二输出力中的每一者包括由对应的活塞分开的两个腔之间的压力差。
46.在步骤406,在判断第一输出力与第二输出力之间的输出力差值大于第一阈值并且第一位移与第二位移之间的位移差大于第二阈值时,可在步骤408确定舵面发生力纷争。在一个实施例中,响应于确定舵面发生力纷争,可提供指示舵面发生力纷争的报警信号。该报警信号可传递给飞控系统或其他机载电子组件,或者提供给用户。例如,飞控系统或力纷争监控器可提供音频和/或视觉指示。在可选实施例中,响应于舵面发生力纷争,可使第一作动器或第二作动器中的一者或两者抑制驱动舵面。
47.在可选步骤410,可将位移差乘以系数以生成转换力值,将转换力值与输出力差值进行比较。如果转换力值与输出力差值相差大于阈值,则可在步骤412发出力传感器故障信号。
48.在可选步骤412,响应于力传感器故障信号,可抑制针对舵面的力纷争监控。例如,力纷争监控器或者执行力纷争监控的其他组件可停止进行力纷争监控。
49.虽然图4按照某种顺序描述了各个步骤,但是应理解,这些步骤可以按不同的顺序或者一些步骤可以并发地执行。例如,步骤402和404可以按不同的顺序或并发地执行,步骤
406和步骤410可以按不同的顺序或并发地执行,等等。
50.本发明至少存在以下优点和益处:
51.1、提供双通道监控,力纷争监控的鲁棒性强,降低了误触发概率,提高了航线运行效率;
52.2、适配性强,力纷争监控器可使用飞控系统中已经存在的传感器或传感器信号,无需对设备进行改装,该力纷争监控器算法方案可以在大多数飞机的fcm中实现;
53.3、通过位置传感器对力传感器的数据进行异源交叉验证,提高了压力信号的完整度。
54.应注意,在各实施例中给出的数值、阈值等仅作为示例,而不作为对本发明范围的限制。此外,作为一个整体技术方案,还存在其他没有被本发明权利要求或说明书所列举的元器件或者步骤。而且,一个元器件的单个名称不排除该元器件的其他名称。
55.此外,需要说明的是,使用“第一”、“第二”等序列词来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本技术保护范围的限制。
56.以上描述的方法和装置的各个步骤和模块可以用硬件、软件、或其组合来实现。如果在硬件中实现,结合本公开描述的各种说明性步骤、模块、以及电路可用通用处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)、或其他可编程逻辑组件、硬件组件、或其任何组合来实现或执行。通用处理器可以是处理器、微处理器、控制器、微控制器、或状态机等。如果在软件中实现,则结合本公开描述的各种说明性步骤、模块可以作为一条或多条指令或代码存储在计算机可读介质上或进行传送。实现本公开的各种操作的软件模块可驻留在存储介质中,如ram、闪存、rom、eprom、eeprom、寄存器、硬盘、可移动盘、cd-rom、云存储等。存储介质可耦合到处理器以使得该处理器能从/向该存储介质读写信息,并执行相应的程序模块以实现本公开的各个步骤。而且,基于软件的实施例可以通过适当的通信手段被上载、下载或远程地访问。这种适当的通信手段包括例如互联网、万维网、内联网、软件应用、电缆(包括光纤电缆)、磁通信、电磁通信(包括rf、微波和红外通信)、电子通信或者其他这样的通信手段。
57.还应注意,这些实施例可能是作为被描绘为流程图、流图、结构图、或框图的过程来描述的。尽管流程图可能会把诸操作描述为顺序过程,但是这些操作中有许多操作能够并行或并发地执行。另外,这些操作的次序可被重新安排。
58.所公开的方法、装置和系统不应以任何方式被限制。相反,本公开涵盖各种所公开的实施例(单独和彼此的各种组合和子组合)的所有新颖和非显而易见的特征和方面。所公开的方法、装置和系统不限于任何具体方面或特征或它们的组合,所公开的任何实施例也不要求存在任一个或多个具体优点或者解决特定或所有技术问题。
59.本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1