一种民用快递运输无人机的制作方法
1.本发明涉及无人机技术领域,尤其是涉及一种民用快递运输无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收。可反复使用多次。广泛用于空中侦察、监视、通信、反潜、电子干扰等。在快递运输行业,快递无人机也正慢慢被开发和应用。快递无人机能自动将快递包裹送达目的地,其优点主要在于解决偏远地区的配送问题,提高配送效率,同时减少人力成本。现有的无人机智能化程度低,需要人工将快递盒固定在无人机上运输,不能根据快递盒的位置自动准确抓取快递运输。
技术实现要素:
3.本发明的目的在于克服上述技术不足,提出民用快递运输无人机,解决现有技术中需要人工将快递盒固定在无人机上运输,不能根据快递盒的位置自动准确抓取快递运输的技术问题。
4.为达到上述技术目的,本发明的技术方案提供一种民用快递运输无人机,其特征在于,包括无人机主体、机械抓手以及快递盒拾取系统;
5.机械抓手安装在无人机主体底部,机械抓手用于抓取快递盒;
6.快递盒拾取系统包括快递盒追踪系统以及中央控制系统,快递盒追踪系统用于对快递盒的位置信息进行检测,中央控制系统用于根据快递盒追踪系统检测的位置信息控制无人机主体飞行至快递盒处,并控制机械抓手精确抓取快递盒。
7.进一步,机械抓手包括升降装置、第一轨道、第一滑块、第一驱动组件以及夹板,升降装置安装在无人机主体底部,升降装置下端安装有第一轨道,第一轨道底部滑动连接有两个第一滑块,两个第一滑块分别与用于驱动两个第一滑块在第一轨道上相对或相反运动的第一驱动组件连接,两个第一滑块底部均安装有夹板。
8.进一步,升降装置包括两个第一气缸,两个第一气缸分别安装在安装板底部两侧,第一气缸安装在安装板底部两侧,两个第一气缸的活塞杆分别与第一轨道顶部两端连接。
9.进一步,第一驱动组件包括第一丝杆、第一轴承以及第一电机,第一丝杆外壁设有两组螺旋相反的第一外螺纹,两个第一滑块内分别设有螺旋方向相反的第一螺纹孔,两组第一外螺纹分别螺纹连接在两个第一滑块的第一螺纹孔内,第一丝杆一端设在第一轴承内,第一轴承安装在第一轨道底部一端,第一丝杆另一端与第一电机的输出轴连接,第一电机安装在第一轨道底部另一端。
10.进一步,两块夹板相对一侧均设有防滑条。
11.进一步,机械抓手还包括第二轨道、第二滑块、第二驱动组件、连接板以及支撑板,第二轨道安装在无人机主体底部且与第一轨道相互垂直,第二轨道底部滑动连接有两个第二滑块,两个第二滑块分别与用于驱动两个第二滑块在第二轨道上相对或相反运动的第二驱动组件连接,两个第二滑块底部均安装有连接板,两块连接板相对一侧的下端均安装有支撑板。
12.进一步,第二驱动组件包括第二丝杆、第二轴承以及第二电机,第二丝杆外壁设有两组螺旋相反的第二外螺纹,两个第二滑块内分别设有螺旋方向相反的第二螺纹孔,两组第二外螺纹分别螺纹连接在两个第二滑块的第二螺纹孔内,第二丝杆一端设在第二轴承内,第二轴承安装在第二轨道底部一端,第二丝杆另一端与第二电机的输出轴连接,第二电机安装在第二轨道底部另一端。
13.进一步,快递盒追踪系统包括设在无人机本体上的第一处理器、第一gps模块、摄像头、uwb测距模块以及第一通信模块,第一处理器分别与第一gps模块、摄像头、uwb测距模块、第一通信模块和中央控制器电连接,快递盒追踪系统还包括设在快递盒上的第二处理器、第二gps模块、uwb发射模块、位置标签以及第二通信模块,第二处理器分别与第二gps模块、uwb发射模块、位置标签和第二通信模块电连接,第一通信模块与第二通信模块无线通信连接,uwb测距模块与uwb发射模块无线连接,摄像头用于通过位置标签获取快递盒的位置信息。
14.进一步,第一处理器和第二处理器均采用stm32系列单片机。
15.进一步,第一通信模块和第二通信模块均采用lora通信模块。
16.本发明的有益效果包括:
17.1、通过快递盒追踪系统可对快递盒的位置信息进行检测,中央控制系统用于根据快递盒追踪系统检测的位置信息控制无人机主体飞行至快递盒处,并控制机械抓手精确抓取快递盒,无需人工将快递盒固定在无人机上,自动化程度高;
18.2、当抓取快递盒时,通过第一驱动组件可带动两个第一滑块相对运动,两个第一滑块可分别带动两块夹板相对运动,即可抓取快递盒,抓取后,通过升降装置可带动快递盒上升,当上升到一定高度后,通过第二驱动组件可带动两个第二滑块相对运动,两个第二滑块可分别通过连接板带动两块支撑板相对运动,使两块支撑板运动至快递盒下方对快递盒进行支撑,从而可防止快递盒在运输的过程中脱落;
19.3、第一gps模块用于获取无人机主体的当前位置信息,第二gps模块获取停快递盒的当前位置信息,并将各自的位置信息通过第一通信模块和第二通信模块相互进行通信,无人机主体的初级引导系统由第一gps模块和uwb测距模块组成,利用第一gps模块获取的位置信息与uwb测距模块和uwb发射模块之间的测距功能和测距数据,来引导无人机主体进入快递盒的附近区域,摄像头可对快递盒上的位置标签的3d位置信息进行识别,无人机主体可根据3d位置信息进行精确定位停靠,从而可使机械抓手精确抓取快递盒。
附图说明
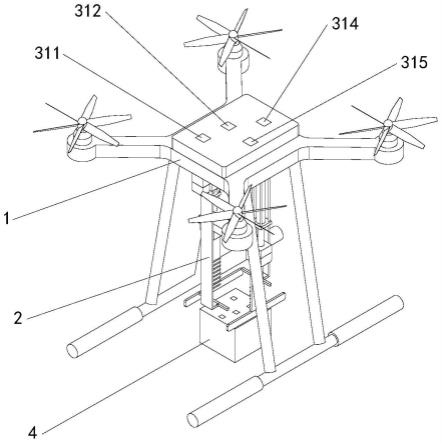
20.图1是本发明实施例的一种民用快递运输无人机结构示意图;
21.图2是本发明实施例的一种民用快递运输无人机另一状态图;
22.图3是本发明实施例的快递盒拾取系统原理框图;
23.图4是本发明实施例的快递盒结构示意图;
24.图中:1、无人机主体;2、机械抓手;21、升降装置;22、第一轨道;23、第一滑块;24、第一驱动组件;241、第一丝杆;242、第一轴承;243、第一电机;25、夹板;251、防滑条;26、第二轨道;27、第二滑块;28、第二驱动组件;281、第二丝杆;282、第二轴承;283、第二电机;29、连接板;20、支撑板;3、快递盒拾取系统;31、快递盒追踪系统;311、第一处理器;312、第一gps模块;313、摄像头;314、uwb测距模块;315、第一通信模块;316、第二处理器;317、第二gps模块;318、uwb发射模块;319、位置标签;310、第二通信模块;32、中央控制系统;4、快递盒。
具体实施方式
25.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
26.如图1-4所示,本发明提供了一种民用快递运输无人机,包括无人机主体1、机械抓手2以及快递盒拾取系统3;
27.机械抓手2安装在无人机主体1底部,机械抓手2用于抓取快递盒4;
28.快递盒拾取系统3包括快递盒追踪系统31以及中央控制系统32,快递盒追踪系统31用于对快递盒4的位置信息进行检测,中央控制系统31用于根据快递盒追踪系统31检测的位置信息控制无人机主体1飞行至快递盒4处,并控制机械抓手2精确抓取快递盒4。
29.更具体地,机械抓手2包括升降装置21、第一轨道22、第一滑块23、第一驱动组件24以及夹板25,升降装置21安装在无人机主体1底部,升降装置21下端安装有第一轨道22,第一轨道22底部滑动连接有两个第一滑块23,两个第一滑块23分别与用于驱动两个第一滑块23在第一轨道22上相对或相反运动的第一驱动组件24连接,两个第一滑块23底部均安装有夹板25。通过第一驱动组件24可带动两个第一滑块23在第一轨道22上相对或相反运动,两个第一滑块23可分别带动两块夹板25相对或相反运动,从而可抓取或放下快递盒4。
30.本实施例中,升降装置21包括两个气缸,两个气缸分别安装在无人机主体1底部两侧,两个气缸的活塞杆分别与第一轨道22顶部两端连接。
31.更具体地,第一驱动组件24包括第一丝杆241、第一轴承242以及第一电机243,第一丝杆241外壁设有两组螺旋相反的第一外螺纹,两个第一滑块内分别设有螺旋方向相反的第一螺纹孔,两组第一外螺纹分别螺纹连接在两个第一滑块24的第一螺纹孔内,第一丝杆241一端设在第一轴承242内,第一轴承242安装在第一轨道23底部一端,第一丝杆241另一端与第一电机243的输出轴连接,第一电机243安装在第一轨道23底部另一端。通过第一电机243可带动第一丝杆241转动,第一丝杆241通过第一外螺纹和第一螺纹孔配合可带动两个第一滑块24沿着第一轨道23相对或相反运动。
32.需要说明的是,两块夹板25相对一侧均设有防滑条251。防滑条251可避免两块夹板25抓取快递盒4时,快递盒4从两块夹板25之间脱落。
33.更具体地,机械抓手2还包括第二轨道26、第二滑块27、第二驱动组件28、连接板29以及支撑板20,第二轨道22安装在无人机主体1底部且与第一轨道22相互垂直,第二轨道22
底部滑动连接有两个第二滑块27,两个第二滑块27分别与用于驱动两个第二滑块27在第二轨道26上相对或相反运动的第二驱动组件28连接,两个第二滑块27底部均安装有连接板29,两块连接板29相对一侧的下端均安装有支撑板20。当快递盒4被抓取后,通过升降装置21可带动快递盒4上升,当快递盒4上升到一定高度后,通过第二驱动组件28可带动两个第二滑块27相对运动,两个第二滑块27可分别通过连接板29带动两块支撑板20相对运动,使两块支撑板20运动至快递盒4下方对快递盒4进行支撑,从而可防止快递盒4在运输的过程中脱落。
34.更具体地,第二驱动组件28包括第二丝杆281、第二轴承282以及第二电机283,第二丝杆281外壁设有两组螺旋相反的第二外螺纹,两个第二滑块内分别设有螺旋方向相反的第二螺纹孔,两组第二外螺纹分别螺纹连接在两个第二滑块27的第二螺纹孔内,第二丝杆281一端设在第二轴承282内,第二轴承282安装在第二轨道26底部一端,第二丝杆281另一端与第二电机283的输出轴连接,第二电机283安装在第二轨道26底部另一端。通过第二电机283可带动第一丝杆281转动,第一丝杆281通过第一外螺纹和第一螺纹孔配合可带动两个第二滑块27沿着第二轨道26相对或相反运动。
35.更具体地,快递盒追踪系统31包括设在无人机本体1上的第一处理器311、第一gps模块312、摄像头313、uwb测距模块314以及第一通信模块315,第一处理器311分别与第一gps模块312、摄像头313、uwb测距模块314、第一通信模块315和中央控制器22电连接,快递盒追踪系统31还包括设在快递盒上的第二处理器316、第二gps模块317、uwb发射模块318、位置标签319以及第二通信模块310,第二处理器316分别与第二gps模块317、uwb发射模块318、位置标签319和第一通信模块310电连接,第一通信模块315与第二通信模块310无线通信连接,uwb测距模块314与uwb发射模块318无线连接,摄像头313用于通过位置标签319获取快递盒4的位置信息。第一gps模块312用于获取无人机主体1的当前位置信息,第二gps模块317获取停快递盒4的当前位置信息,并将各自的位置信息通过第一通信模块315和第二通信模块310相互进行通信,无人机主体1的初级引导系统由第一gps模块312和uwb测距模块314组成,利用第一gps模块11获取的位置信息与uwb测距模块314和uwb发射模块318之间的测距功能和测距数据,来引导无人机主体1进入快递盒1的附近区域,摄像头12可对快递盒4上的位置标签319的3d位置信息进行识别,无人机主体1可根据3d位置信息进行精确定位停靠,从而可使机械抓手2精确抓取快递盒4。
36.需要说明的是,位置标签319为apriltag定位系,tags是由黑白相间的类似于二维码的方块构成,不同的tag包含了不同的id信息,只要把这个tag贴到目标上,摄像头12就可以识别出这个标签的3d位置信息。
37.需要说明的是,第一处理器311和第二处理器316均采用stm32系列单片机。
38.需要说明的是,第一通信模块315和第二通信模块310均采用lora通信模块。
39.本发明的有益效果包括:通过快递盒追踪系统31可对快递盒的位置信息进行检测,中央控制系统32用于根据快递盒追踪系统31检测的位置信息控制无人机主体1飞行至快递盒4处,并控制机械抓手2精确抓取快递盒4,无需人工将快递盒4固定在无人机上,自动化程度高;当抓取快递盒4时,通过第一驱动组件24可带动两个第一滑块23相对运动,两个第一滑块23可分别带动两块夹板25相对运动,即可抓取快递盒4,抓取后,通过升降装置21可带动快递盒4上升,当上升到一定高度后,通过第二驱动组件28可带动两个第二滑块27相
对运动,两个第二滑块27可分别通过连接板29带动两块支撑板20相对运动,使两块支撑板20运动至快递盒4下方对快递盒4进行支撑,从而可防止快递盒4在运输的过程中脱落;第一gps模块312用于获取无人机主体1的当前位置信息,第二gps模块317获取停快递盒4的当前位置信息,并将各自的位置信息通过第一通信模块315和第二通信模块310相互进行通信,无人机主体1的初级引导系统由第一gps模块312和uwb测距模块314组成,利用第一gps模块11获取的位置信息与uwb测距模块314和uwb发射模块318之间的测距功能和测距数据,来引导无人机主体1进入快递盒1的附近区域,摄像头12可对快递盒4上的位置标签319的3d位置信息进行识别,无人机主体1可根据3d位置信息进行精确定位停靠,从而可使机械抓手2精确抓取快递盒4。
40.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1