一种具有桨叶复用功能的两栖旋翼无人机及其操控方法
1.本发明涉及一种具有桨叶复用功能的两栖旋翼无人机及其操控方法,属于两栖旋翼无人机领域。
背景技术:
2.水空两栖旋翼无人机是指既可以在空中飞行,又可以在水中航行的无人机,有机结合了飞行器与潜水艇的优势。在无人机领域研究中,水空两栖旋翼无人机是一个重要研究方向,更广阔的空间使得无人机有了更多的可能性,在海洋救援、勘测侦察军事领域等方面有着很大的发展空间。海空两栖旋翼无人机的技术关键在于满足空中与水下正常工作,同时可以在空中飞行与水下航行两种模式之间稳定切换。目前已有的两栖旋翼无人机,大多数都为传统的四旋翼布局,缺少对新型布局的探究。
技术实现要素:
3.针对现有水空两栖旋翼无人机技术的不足,本发明的目的是提供一种具有桨叶复用功能的两栖旋翼无人机及其操控方法,能够兼顾空中飞行和水下航行,工作效率高、稳定性好,入水出水飞行模式切换稳定,提高无人机的适用性。
4.本发明采用的技术方案如下:
5.一种具有桨叶复用功能的两栖旋翼无人机,包括机身,上部旋翼和下部旋翼,独立变矩机构和驱动电机;其中,所述机身包括无人机机体,独立变矩机构,驱动电机;所述上部旋翼及下部旋翼包括桨叶和连接杆,连接杆与变矩拉杆连接。
6.进一步的,所述上部旋翼包括上桨叶、第一连接杆、上旋转轴;所述上桨叶对称安装在机身上部,为无人机提供空中升力,为细长型设计。
7.进一步的,所述下部旋翼包括下桨叶、第二连接杆、下旋转轴;所述下桨叶对称安装在机身下部,在空中提供平衡所述上部旋翼产生的反扭矩的力,不提供升力;在水下主要提供水下推进力,为短粗型设计。
8.进一步的,所述独立变矩机构安装在所述上部旋翼处,包括变矩拉杆、作动器、距离传感器、舵机;所述变矩拉杆一端与上桨叶相连,另一端与第一连接杆相连;所述第一连接杆连接在作动器上,当所述作动器上下运动时,带动所述变矩拉杆运动,从而带动所述上桨叶翻转;所述距离传感器安装在所述作动器下方,通过测量所述作动器运动的距离得到所述上桨叶的翻转角度。
9.进一步的,所述旋转轴固定安装在所述机身内,并在所述驱动电机的带动下旋转。
10.进一步的,上、下部旋翼采用独立驱动电机控制,所述驱动电机分别对应安装在所述上、下部旋翼处;在空中飞行时,所述上部驱动电机带动上桨叶旋转,提供空中升力;所述下部驱动电机带动下桨叶旋转,且所述下部旋翼转速大于所述上部旋翼,提供平衡所述上部旋翼产生的反扭矩的力。
11.本技术还提供上述具有桨叶复用功能的两栖旋翼无人机的操控方法,所述操控方
法包括:所述无人机的入水、出水模式切换:
12.入水时,所述两栖旋翼无人机飞至水面上方,在空中所述驱动电机停转的同时,通过所述独立变矩机构调整所述上部旋翼攻角为90
°
,上、下部旋翼同机身一同在自身重力的作用下垂直进入水中,此时所述上部旋翼充当水下机翼提供水下升力;入水后,由于所述两栖旋翼无人机的整机水下浮力接近机身自重,保证了所述两栖旋翼无人机不会立刻沉入水中;待机身自然水平的同时启动所述下部驱动电机,带动下桨叶低速旋转充当水下螺旋桨,提供水下航行动力;
13.出水时,通过所述独立变矩机构调整所述上桨叶,即所述水下机翼向上偏转,同时控制所述水下螺旋桨转速使得所述水下螺旋桨旋转提供的前向推力大于等于由所述水下机翼向上偏转后提供的水下升力的水平分力。此时,所述水下机翼提供的水下升力的另一个垂直分力作用于所述机身上部,产生抬头力矩,所述两栖无人机抬头。
14.在所述两栖无人机开始抬头倾斜后,通过控制所述下部驱动电机使得所述水下螺旋桨加速旋转,使得其提供的前向推进力增大,从而平衡所述机身浮力的水平分力,同时通过所述独立变矩机构调整所述水下机翼的偏转角度,保证整机所有向上的分力平衡整机自身重力,此时所述两栖旋翼无人机将继续保持抬头倾斜的状态,最终在水下螺旋桨的推进下,不断调整所述两栖旋翼无人机的姿态直至为垂直。待所述两栖旋翼无人机姿态垂直后,所述下部驱动电机带动下桨叶旋转,提供向上的推进力,并通过所述独立变矩机构微调所述水下机翼的偏转角度,最终将所述上部旋翼推出水面。
15.进一步的,出水时,在所述上部旋翼被推出水面后,通过所述独立变矩机构调整所述上部旋翼翻转为空中飞行状态,并在所述上部驱动电机的带动下高速旋转,将所述两栖旋翼无人机水下部分及所述下部旋翼拉出水面,转换为水上旋翼飞行器模式。
16.进一步的,所述操控方法还包括:
17.在空中飞行时,通过所述独立变矩机构控制所述上桨叶前后翻转,从而改变其桨盘平面的倾斜状态;当桨盘平面前倾时,所述两栖旋翼无人机前飞;当桨盘平面后倾时,所述两栖旋翼无人机向后方飞行;当桨盘平面左倾时,所述两栖旋翼无人机向左飞行;当桨盘平面右倾时,所述两栖旋翼无人机向右飞行,从而实现所述两栖旋翼无人机的空中姿态控制。
18.进一步的,所述操控方法还包括:在水中航行时,所述上部旋翼充当水下机翼提供水下升力,通过所述独立变矩机构调整其攻角控制所述两栖旋翼无人机的姿态和运动;当所述水下机翼向下偏转时,产生低头力矩,此时所述两栖旋翼无人机下潜;当所述水下机翼向上偏转时,产生抬头力矩,所述两栖旋翼无人机上浮。当所述水下机翼一侧桨叶不偏转,一侧桨叶小幅度偏转时,产生向一侧的力,使得所述两栖无人机向左或向右偏转,从而控制所述两栖旋翼无人机在水下的姿态及运动。
19.与现有技术相比,本发明具有以下优点:
20.本发明所述的一种具有桨叶复用功能的两栖旋翼无人机及其操控方法,设计了独特的单旋翼布局,不同于传统的四旋翼布局,本发明采用的单旋翼布局更加简单高效,为两栖旋翼无人机的布局设计提供了新思路。
21.本发明所述的一种具有桨叶复用功能的两栖旋翼无人机及其操控方法,实现了桨叶的复用功能,即用同一套桨叶实现了不同的两套功能。所述上部旋翼在空中时作为空中
旋翼提供升力,在水下时作为水下机翼控制所述两栖旋翼无人机的姿态及运动。所述下部旋翼在空中时作为平衡旋翼,用来平衡所述上部旋翼产生的反扭矩,在水中时作为水下螺旋桨提供水下航行动力。
22.本发明所述的一种具有桨叶复用功能的两栖旋翼无人机及其操控方法,采用独特的出水入水策略,入水时通过电机停转后依靠自身重力垂直扎进水中,简单高效;出水时采用分段式出水策略,充分利用了桨叶的双重功能。
23.本发明所述的一种具有桨叶复用功能的两栖旋翼无人机及其操控方法,可以实现潜航、飞行两种模式的稳定自由切换,实现了一机多用的效果,拓宽了无人机的用途。
附图说明
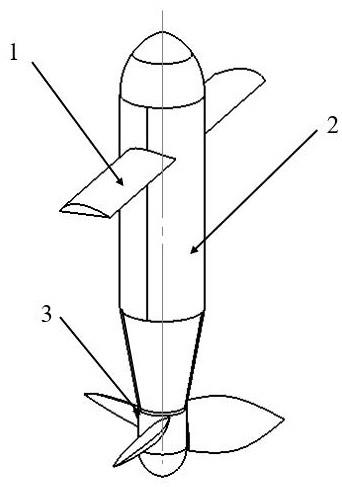
24.图1为本发明无人机整体布局图;
25.图2为本发明无人机飞行侧视图;
26.图3为本发明无人机水下航行示意图;
27.图4为本发明无人机水下航行侧视图;
28.图5为本发明无人机所采用的独立变矩机构示意图;
29.1.上部旋翼,2.机身,3.下部旋翼,4.上桨叶,5.下桨叶,6.水下机翼,7.水下螺旋桨,8.变矩拉杆,9.作动器,10.旋转轴,11.距离传感器。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明的技术方案作进一步详细说明。
31.实施例1
32.如附图所示,本实施例为一种具有桨叶复用功能的两栖旋翼无人机,包括两栖旋翼无人机机身2及上部旋翼1、下部旋翼3和独立变矩机构。其中,独立变矩机构包括变矩拉杆8,作动器9,上旋转轴10和距离传感器11。
33.所述机身2作为载体,通过控制整机重量及材料的选取使得整机水下浮力接近机身自重,保证无人机的水下潜航。所述上部旋翼1包括上桨叶4,连接杆和上旋转轴10等,所述上桨叶4对称安装在所述机身2上部,提供主要空中升力,为细长型设计,通过所述上部驱动电机带动旋转。下部旋翼包括下桨叶、第二连接杆、下旋转轴;所述下桨叶对称安装在机身下部,在空中提供平衡所述上部旋翼产生的反扭矩的力,不提供升力;在水下主要提供水下推进力,为短粗型设计。
34.所述独立变矩机构包括变矩拉杆8,作动器9,上旋转轴10,距离传感器11等,对应安装在所述上部旋翼1处。所述上桨叶4分别通过连接件及变矩拉杆8与作动器9连接,所述变矩拉杆一端与上桨叶相连,另一端与第一连接杆相连;所述第一连接杆连接在作动器上,当所述作动器9上下运动时,带动所述变矩拉杆8运动,从而改变上部旋翼1的攻角,并通过上部驱动电机带动上旋转轴10旋转。所述距离传感器11安装在所述作动器9下方,通过测量所述作动器9运动的距离来解算出最终桨叶的翻转角度。所述距离传感器安装在所述作动器下方,通过测量所述作动器运动的距离得到所述上桨叶的翻转角度,从而进行所述两栖旋翼无人机在空中的姿态控制。
35.进一步的,所述旋转轴固定安装在所述机身内,并在所述驱动电机的带动下旋转。
上、下部旋翼采用独立驱动电机控制,所述驱动电机分别对应安装在所述上、下部旋翼处;在空中飞行时,所述上部驱动电机带动上桨叶旋转,提供空中升力;所述下部驱动电机带动下桨叶旋转,且所述下部旋翼转速大于所述上部旋翼,提供平衡所述上部旋翼产生的反扭矩的力。
36.实施例2
37.本技术还提供上述具有桨叶复用功能的两栖旋翼无人机的操控方法,所述操控方法包括:所述无人机的入水、出水模式切换:
38.当所述两栖旋翼无人机入水时,所述两栖旋翼无人机飞至水面上方,所述驱动电机停转的同时控制所述作动器9向下运动带动所述变矩拉杆8运动,使得所述上桨叶4向上翻转90
°
,此时所述上、下部旋翼同机身一同在自身重力的作用下垂直进入水中,此时所述上部旋翼充当水下机翼提供水下升力。入水之后,由于所述两栖旋翼无人机的整机水下浮力接近机身自重的设计,保证了所述两栖旋翼无人机不会立刻沉入水中。待机身自然水平的同时启动所述下部驱动电机,带动下桨叶5低速旋转充当水下螺旋桨7,提供水下航行动力。
39.当所述两栖旋翼无人机出水时,首先通过控制所述作动器9向下运动带动所述变矩拉杆8运动,使得所述水下机翼6向上偏转,同时控制所述水下螺旋桨7转速使得其旋转提供的前向推力满足f1≥f
2 sinθ,其中f1为所述水下螺旋桨7旋转产生的前向推力,f2为所述水下机翼6向上偏转后提供的水下升力,θ为所述水下机翼向上偏转的角度。此时,f2的另一个分力fcosθ作用于所述机身2上部,产生抬头力矩,所述两栖无人机抬头。
40.在所述两栖无人机开始抬头倾斜后,通过控制所述下部驱动电机使得所述水下螺旋桨7加速旋转,使得其提供的前向推进力增大,从而平衡所述机身2浮力的水平分力,同时通过控制所述作动器9运动带动所述变矩拉杆8运动,使得所述水下机翼6发生偏转,从而调整所述水下机翼6的偏转角度,保证整机所有向上的分力平衡整机自身重力,此时所述两栖旋翼无人机将继续保持抬头倾斜的状态,最终在水下螺旋桨7的推进下,不断调整所述两栖旋翼无人机的姿态直至为垂直。待所述两栖旋翼无人机姿态垂直后,所述下部驱动电机带动下桨叶5旋转,提供向上的推进力,并通过控制所述作动器9上下运动带动所述变矩拉杆8运动,使得所述水下机翼6进行偏转,从而通过微调所述水下机翼6的偏转角度保证所述两栖旋翼无人机的姿态垂直,最终将所述上部旋翼1推出水面。
41.进一步的,出水时,在所述上部旋翼1被推出水面后,再次通过控制所述作动器9向下运动带动所述变矩拉杆8运动,使得所述上桨叶4向下翻转,进而调整所述上部旋翼1攻角为空中飞行状态,并在所述上部驱动电机的带动下高速旋转,将所述两栖旋翼无人机水下部分及所述下部旋翼3拉出水面,转换为水上旋翼飞行器模式。
42.当所述两栖旋翼无人机在空中飞行时,所述上部旋翼1在所述上部驱动电机的带动下高速旋转提供升力,同时所述下部旋翼3以更快旋转速度旋转进而平衡所述上部旋翼1带来的反扭矩。通过所述作动器9上下运动带动变矩拉杆8运动,从而控制所述上桨叶4前后翻转,从而改变其桨盘平面的倾斜状态。当桨盘平面前倾时,所述两栖旋翼无人机前飞;当桨盘平面后倾时,所述两栖旋翼无人机向后方飞行;当桨盘平面左倾时,所述两栖旋翼无人机向左飞行;当桨盘平面右倾时,所述两栖旋翼无人机向右飞行。最终实现所述两栖旋翼无人机的空中姿态控制。
43.当所述两栖旋翼无人机在水中航行时,所述上部旋翼1由于采用细长型设计,充当水下机翼6并提供水下升力,通过所述作动器9向上运动带动所述变矩拉杆8运动,使得所述水下机翼6向下偏转,产生低头力矩,此时所述两栖旋翼无人机下潜;当所述作动器9向下运动带动所述变矩拉杆8运动时,所述水下机翼向上偏转,产生抬头力矩,所述两栖旋翼无人机上浮。当所述作动器9一侧小幅度上下运动而一侧不动时,所述水下机翼一侧桨叶不偏转,一侧桨叶小幅度偏转,此时产生向一侧的力,使得所述两栖无人机向左或向右偏转,从而控制所述两栖旋翼无人机在水下的姿态及运动。所述下部旋翼3由于采用短粗型设计,充当水下螺旋桨7,通过所述下部驱动电机带动其低速旋转,提供水下推进力,从而推动所述两栖旋翼无人机在水下前进。
44.本实施例提供的控制方法在空中飞行时其飞行原理类似普通的单旋翼飞行器,通过增大或减小旋翼的拉力实现飞行的上升或降落,并通过改变旋翼的桨盘平面控制其空中飞行的姿态。在水下航行时其工作原理类似潜航器,并通过控制由上桨叶充当的水下机翼改变其在水中航行的姿态。在两种航行模式下均采用发展较为成熟的、应用广泛的pid控制器来控制所述两栖旋翼无人机的位置及姿态。采用的控制策略为:
[0045][0046]
其中,kp,ki,kd分别为pid控制的比例,微分,积分系数,通过调整三个系数的值,使得所述两栖旋翼无人机系统达到出入水模式切换稳定。
[0047]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,对于本技术领域的技术人员在本发明揭露的技术范围内,还可以做出若干改动和调整。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1