一种可折叠全动双机翼的气动布局结构的制作方法
1.本发明属于飞行器设计技术领域,涉及一种双机翼无人机,具体涉及一种可折叠全动双机翼的气动布局结构。
背景技术:
2.目前小型无人机大量采用双水平翼气动布局,而且随着任务载荷和飞行动力种类的多样化,在开放式架构下,无人机采用通用化的主体结构,根据实际飞行需求选取子系统(包括传感系统、通讯系统、控制系统、电力系统等)的搭配方案,快速拓展构建整机的能力成为其未来重要发展方向,由此促使无人机的模块化设计趋势越发明显。而继承自传统有人机的无人机设计理念,具有可控气动面(包括襟翼、副翼、方向舵、俯仰舵)分散且需要分别伺服控制,控制规律对舱段布局的变化敏感,舵机与发动机的布置安装易产生干涉等问题,在方案设计中需要子系统间进行多轮协调迭代,子系统改型就需要全机调整,不利于快速升级,制造装配的敏捷性和可重构性差,无法满足模块化设计需求。
技术实现要素:
3.为了解决上述问题,本发明提供了一种可折叠全动双机翼的气动布局结构,将气动翼面的控制机构集中到一个舱段内,便于作为一个相对独立的模块单独设计,避免挤占其他舱段空间。可折叠式的全动机翼和稳定尾翼也保证了在起飞前的有效空间利用率。
4.本发明的技术方案如下:
5.一种可折叠全动双机翼的气动布局结构,在无人机机体中段两侧对称设有两个前导轨和两个后导轨,两个前全动机翼分别连接在两个前导轨内的伺服机构上,两个后全动机翼分别连接在两个后导轨内的伺服机构上;伺服机构在导轨内移动和转动。
6.进一步的,前全动机翼的航向前端为前全动机翼的承力轴,前全动机翼的承力轴与前导轨内的伺服机构连接。
7.进一步的,后全动机翼的航向前端为后全动机翼的承力轴,后全动机翼的承力轴与后导轨内的伺服机构连接。
8.进一步的,同侧的前导轨和后导轨是同心的弧形。同侧前后两片全动翼面能同时沿导轨以圆心作点对称旋转,从而在无人机各种飞行姿态下,实时调节无人机的升阻比,提升无人机续航能力。
9.进一步的,机身左右两侧的前全动机翼和后全动机翼的结构相同,左右两侧前全动机翼和后全动机翼能够差动旋转。实现对左右两侧所受气动力和力矩的差异控制,配合翼面绕承力轴旋转,从而支持无人机在小飞行半径内完成复杂机动动作。
10.进一步的,四个伺服机构相互独立运转。
11.进一步的,还包括控制软件和控制系统,控制系统连接和控制四个伺服机构;控制软件生成控制控制系统的指令,控制软件内设有典型飞行状态所对应的四个伺服机构的控制指令。
12.进一步的,控制软件设有手动控制模式,手动控制模式下对四个伺服机构进行分别控制,在典型飞行状态控制下改为手动控制模式时,根据手动控制的输入,在典型飞行状态所对应的四个伺服机构的控制指令下增加手动控制的调节参数。
13.进一步的,前全动机翼和后全动机翼旋转到垂直于集体上表面、且移动到前导轨或后导轨的极限端时,前全动机翼和后全动机翼与伺服机构的连接处所设的缺口打开,且缺口与铰合旋动处吻合,此时前全动机翼和后全动机翼能够通过缺口相对于伺服机构转动,从而将前全动机翼和后全动机翼折叠在机体侧面上。
14.进一步的,无人机的尾部上表面还设有可折叠的稳定尾翼,稳定尾翼折叠后与无人机相贴合的无人机顶部表面是平面。
15.本发明的有益效果如下:
16.1、本发明集中布置了可控气动面,可采用平动、差动、随动、绕承力轴旋转等多种控制方式,大大提升了无人机的飞行操纵范围。
17.2、本发明为无人机进行高机动动作留出了足够的操作空间,解决了传统的前后双翼飞机的结构固化问题。
18.3、气动面可折叠的设计配合矩形截面的无人机机身结构,使无人机在未飞行状态的结构外包络尽可能小而且规则,便于储存、运输和装载,减小运输、贮存、搭载的所需空间,为无人机的大密度投放提供可能。
19.4、将全动机翼向无人机机体中部布置,也就使得伺服双全动机翼的控制机构向中部集中,尽量避开动力系统的安装空间,更容易确立与整机质心的位置关系,便于通过功能整合设计在更小空间内完全满足无人机的气动控制需要,形成紧凑且相对独立的气动控制模块,有利于无人机整机的模块化设计。
附图说明
20.为了更清楚地说明本发明专利实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明专利的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
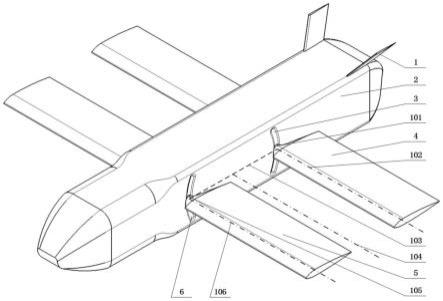
21.图1是本发明可折叠全动双机翼的气动布局的构成示意图;
22.图2是本发明全动双机翼的旋转示意图;
23.图3是本发明全动双机翼的折叠示意图;
24.其中,1—稳定尾翼,2—无人机机身,3—后导轨,4—后全动机翼,5—前全动机翼,6—前导轨,101—后全动机翼的承力轴,102—后全动机翼承力轴的轴线,103—前后两全动机翼轴线过初始轴线的连线,104—初始轴线,105—前全动机翼的承力轴,106—前全动机翼承力轴的轴线。
具体实施方式
25.本部分是本发明的实施例,用于解释和说明本发明的技术方案。在不冲突的情况下,本发明的实施例及实施例中的特征可以互相组合。
26.本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示方向或位置关系为给予附图说是的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指装置或与案件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或隐含包括更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或以上。
27.本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义解释,例如,可以是固定连接,也可以是可拆卸连接或者一体化连接;可以是机械连接,也可以是点连接;可以是直接连接,也可以通过中间媒介简介连接,可以是两个元件内部的连通。对于本领域普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
28.一种可折叠全动双机翼的气动布局结构,在无人机机体中段两侧对称设有两个前导轨6和两个后导轨3,两个前全动机翼5分别连接在两个前导轨6内的伺服机构上,两个后全动机翼4分别连接在两个后导轨3内的伺服机构上;伺服机构在导轨内移动和转动。
29.前全动机翼5的航向前端为前全动机翼的承力轴105,前全动机翼的承力轴105与前导轨6内的伺服机构连接。
30.后全动机翼4的航向前端为后全动机翼的承力轴,后全动机翼的承力轴与后导轨3内的伺服机构连接。
31.同侧的前导轨6和后导轨3是同心的弧形。同侧前后两片全动翼面能同时沿导轨以圆心作点对称旋转,从而在无人机各种飞行姿态下,实时调节无人机的升阻比,提升无人机续航能力。
32.机身左右两侧的前全动机翼5和后全动机翼4的结构相同,左右两侧前全动机翼5和后全动机翼4能够差动旋转。实现对左右两侧所受气动力和力矩的差异控制,配合翼面绕承力轴旋转,从而支持无人机在小飞行半径内完成复杂机动动作。
33.四个伺服机构相互独立运转。
34.还包括控制软件和控制系统,控制系统连接和控制四个伺服机构;控制软件生成控制控制系统的指令,控制软件内设有典型飞行状态所对应的四个伺服机构的控制指令。
35.控制软件设有手动控制模式,手动控制模式下对四个伺服机构进行分别控制,在典型飞行状态控制下改为手动控制模式时,根据手动控制的输入,在典型飞行状态所对应的四个伺服机构的控制指令下增加手动控制的调节参数。
36.前全动机翼5和后全动机翼4旋转到垂直于集体上表面、且移动到前导轨6或后导轨3的极限端时,前全动机翼5和后全动机翼4与伺服机构的连接处所设的缺口打开,且缺口与铰合旋动处吻合,此时前全动机翼5和后全动机翼4能够通过缺口相对于伺服机构转动,从而将前全动机翼5和后全动机翼4折叠在机体侧面上。
37.无人机的尾部上表面还设有可折叠的稳定尾翼,稳定尾翼折叠后与无人机相贴合的无人机顶部表面是平面。
38.本专利不同于传统双水平翼气动布局前后机翼相对位置固定的设计,而利用机身侧面两道滑轨,使得前后两机翼的相对位置能够实时调节。整个气动外形由机身两侧共四片的双全动机翼+两片稳定尾翼构成。
39.无人机的可控气动面面积更大且更向无人机机身中部集中,便于集中设置控制系统,并进行模块化处理。
40.机身左右两侧各设置对称的前后两道同心弧形导轨,同侧前后两片全动翼面能同时沿导轨以圆心作点对称旋转,从而在无人机各种飞行姿态下,实时调节无人机的升阻比,提升无人机续航能力。
41.机身左右两侧的全动翼面结构相同,但可以通过左右两侧全动翼面的差动旋转,实现对左右两侧所受气动力和力矩的差异控制,配合翼面绕承力轴旋转,从而支持无人机在小飞行半径内完成复杂机动动作。
42.无人机机身横截面采用矩形轮廓,在起飞前,将全动机翼和稳定尾翼折叠贴合机翼,使得整机外包络为立方体,便于装桶储存,减小运输、贮存、搭载的所需空间,为无人机的大密度投放提供可能。
43.采用横截面为矩形轮廓的无人机机身1,其左右两侧面的中部定义为垂直于平面的初始轴线104分别与两平面相交的点为各自侧面的圆心,以此在两侧面分别设置两道同心且等尺寸的导轨3和6(总共四道)。再分别在两侧各设置前、后全动机翼4和5,机翼根部通过承力轴101和105垂直穿过各自导轨与机身内的伺服控制机构相连(该机构不包含在本专利中)同侧前后两片全动翼面4和5的位置能同时沿导轨3和6以初始轴线104作轴对称旋转,且能根据需要沿各自承力轴的轴线102和106反向自转。机身两侧的四片全动机翼通常以机身铅垂对称平面两两对称运动,在做机动时也可以呈现两侧全动机翼沿各自导轨3和6差动旋转。
44.在需要折叠时,首先前后两全动机翼沿导轨旋转至特定位置,然后沿各自承力轴轴线反向旋转使机翼呈垂直于机身上表面的角度,最后前后两片全动机翼分别沿各自承力轴101和105连接的轴承机构,向前(后)旋转,最终使机翼表面紧贴机身侧面。而稳定尾翼2则沿根部轴线向机身上表面内侧旋转翻折。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1