一种变构型垂直起降飞行器的制作方法
1.本发明属于垂直起降飞行器领域,具体涉及一种变构型垂直起降飞行器。
技术背景
2.垂直起降飞行器由于兼具垂直起降和固定巡航的优势,近年来发展迅速,目前常见垂直起降飞行器,主要包括复合翼飞行器、倾转机翼/动力飞行器以及尾座式垂直起降飞行器三种形式,后两种由于其固有的缺陷,目前最为广泛使用的是复合翼飞行器,但其固定翼飞行模式用于垂直起降的动力系统无任何用途,仅增加飞行阻力。研究一种实现飞行器在垂直起降模式和固定翼巡航模式切换具有重要意义。
3.目前实现飞行器在垂直起降模式和固定翼巡航模式切换的飞行器并不多见,存在的少数方案也多存在技术复杂或者效率不高的问题,例如v-22鱼鹰直升机,该机具备直升机的垂直起降能力,同时又拥有固定翼螺旋桨飞机的高速度和航程远及油耗低等优点,但是经过多年服役仍时常在模式转换过程中坠毁。
技术实现要素:
4.本发明的目的在于提供一种变构型垂直起降飞行器,具备垂直起降模式和固定翼巡航模式两种飞行模式,兼具垂直起降功能和固定翼飞行器高效率巡航的优势,避免复合翼飞行器垂直起降系统废阻,降低固定翼模式巡航阻力,具有较高的空中运输效率。
5.实现本发明目的的技术解决方案为:一种变构型垂直起降飞行器,具备垂直起降多旋翼和固定翼两种飞行器布局形式,通过构型变换实现两种飞行器布局的融合;机翼分为内机翼和外翼,内机翼与机身固定,外翼连接有动力系统,动力系统连接螺旋桨,外翼分割为2部分,2部分通过旋转、拼接、组合,实现构型变换,实现增大整体机翼展弦比,提升固定翼模式巡航飞行效率;两种飞行模式复用一套动力系统,避免传统复合翼垂直起降无人机在固定翼巡航模式时的废阻。具体通过两种方案实现:
6.1)方案1,通过外翼旋转(绕展向轴,大体与y轴方向平行),实现推力/拉力从垂直方向至水平方向的转换,可以通过动力驱动转轴旋转,也可以通过类似四旋翼的前向倾转(前后动力差实现旋转);具备三种典型飞行模式,垂直起降模式、固定翼高效巡航模式、高速巡航模式:
7.外翼部分分为组合的两部分(可前后分、上下分以及组合翼型模式),每部分外翼和动力系统整体绕展向轴方向旋转,直至两部分外翼为z轴方向平行状态180度夹角,实现推力/拉力从垂直方向至水平方向的转换,即高速巡航模式;再通过两部分外翼绕弦向转轴方向对称反向旋转直至夹角0度,至固定翼巡航模式,在固定翼巡航模式组合形成完整外翼,外翼连接的动力系统固联同步旋转推力方向;
8.2)方案2,动力推力方向变换采用倾转模式,通过倾转动力方向实现垂直起降模式和固定翼模式推力方向的匹配;
9.外翼可分为两部分(可前后分、组合翼型模式),分别绕外翼根部转轴(升力方向,
大体与z轴平行)反向旋转,动力系统同步倾转实现,在固定翼巡航模式实现组合形成完整外翼,外翼连接的动力系统协同旋转推力方向。
10.进一步地,所述动力系统可直接安装在机翼上,也可以通过传动轴将动力源传递至翼梢。
11.进一步地,如果动力系统采用螺旋桨动力,采用前后共轴布置,可提高高速气动效率,并降低螺旋桨系统总拉力,以适应起降阶段高拉力和巡航阶段相对较低拉力的需求,如果动力系统采用涡喷发动机,位置应相互错开不供轴,以避免推力系统相互干扰。
12.进一步地,所述动力系统可安装于外翼翼梢,也可以安装于外翼中段等位置,可以进一步提升机翼展弦比,提高巡航效率。
13.与现有技术相比,本发明的有益效果在于:
14.(1)本发明具备垂直起降模式和固定翼巡航模式两种飞行模式,提高了机翼展弦比,提升巡航效率;
15.(2)本发明单侧两组螺旋桨形成共轴反转形式,提升了高速飞行时的推进系统效率;
16.(3)本发明避免复合翼飞行器垂直起降系统废阻,降低固定翼模式巡航阻力;
17.(4)本发明起降模式和固定翼巡航模式的动力系统复用,避免了不必要的多套动力系统;
18.(5)本发明外翼可通过旋转折叠,减少飞行器降落在地面时的空间占用。
附图说明
19.图1为实施例1中垂直起降模式示意图。
20.图2为实施例1中固定翼巡航模式示意图。
21.图3为实施例1中间变换构型状态
①
示意图。
22.图4为实施例1中中间变换构型状态
②
高速巡航模式示意图。
23.图5为实施例1中间变换构型状态
③
示意图。
24.图6为实施例1中间变换转轴示意图。
25.图7为实施例2中垂直起降模式示意图。
26.图8为实施例2中固定翼巡航模式示意图。
27.图9为实施例2中中间变换构型状态
①
示意图。
28.图10为实施例2中中间变换构型状态
②
示意图。
29.图11为实施例2中转轴示意图。
30.图12为实施例中的翼型组合方式示意图,其中图12(a)为翼型前后平面分割示意图,图12(b)为翼型弧线分割保留后半翼型的前缘示意图,图12(c)为翼型上下平面分割示意图,图12(d)为翼型曲线分割形成两个相对完整的翼型示意图。
具体实施方式
31.实施例1
32.本发明是一种变构型垂直起降飞行器由常规固定翼飞行器机身、内翼段,以及可变换构型的外翼段、推进系统及模式变换机构组成,实现外翼段两部分机翼的分开、旋转、
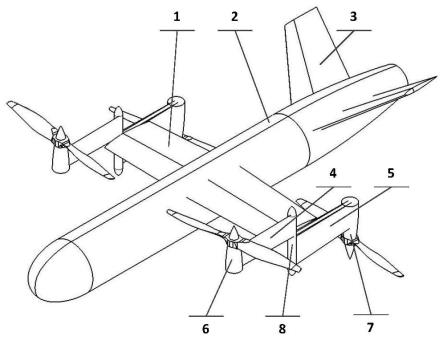
组合,推进系统推力方向的调节。主要组成如图1所示,内机翼1,机身2,尾翼3,左前外翼4,左后外翼5,左前动力系统6,左后动力系统7,第一模式变换机构8,由于机体为左右对称,为简化图形,一种部件仅在单侧标注。
33.内机翼1、机身2、尾翼3构成了传统的固定翼飞行器结构,飞行器结构中的起落架、副翼、升降舵、方向舵等未进行图示,为本领域公知常识,不影响本发明表述,在此不再累述。内机翼与机身固联,与机身无相对运动。
34.外段机翼分为前后两部分,即左前外翼4,左后外翼5,右侧对称同样有右前外翼和右后外翼,左前动力系统6、左后动力系统7,同样有右侧对称部分,左前动力系统6、左后动力系统7分别连接左前外翼4,左后外翼5,通过第一模式变换机构8连接内翼与外翼,并驱动外翼和动力系统一起做气动布局构型变换,在图1垂直起降模式和图2固定翼巡航模式之间变换。
35.为说明模式变换过程,绘制三个中间过程图描述,如图3-5所示,即从地面起飞的垂直起降模式图1—》图3—》图4—》图5—》图2固定翼巡航模式的变换过程,该顺序倒排则为由固定翼巡航模式转变为垂起起降模式,完成从空中巡航降落的过程。该实施例可实现图1所示的垂直起降模式、图2所示的固定翼高效巡航模式、图4所示的高速巡航模式。
36.图1—》图3—》图4,在垂起起降模式下,飞行器垂直提升至预定模式转换飞行高度,左前外翼4,左后外翼5保持平行夹角不变,并和左前动力系统6,左后动力系统7整体绕机翼展向轴线10(轴线10为转向示意的辅助线,基本平行于机体y轴)逐步旋转,在此过程中,由于左前动力系统6,左后动力系统7沿机体向后的推力分量,飞行器逐步建立前向飞行速度,内翼1产生逐步增大的气动升力,对于动力系统提供升力的需求逐步减少,最终达到图4的高速巡航模式状态,此时飞行器达到较大的飞行速度,升力完全由内翼产生,左前动力系统6,左后动力系统7产生的推力平行于机体x轴向后。
37.图4—》图5—》图2,由图4状态左前外翼4,左后外翼5绕弦向转轴线9(弦向转轴线9为转向示意的辅助线,平行于x轴)对称反向旋转,由平行状态180度夹角逐步减小,至图5夹角90度,继续减小至夹角0度,左前外翼4,左后外翼5拼接组成完整一体的外翼,与内翼一起在固定翼模式产生升力。左前动力系统6,左后动力系统7同轴,能够提升螺旋桨系统推进效率。如果是涡喷发动机等动力,不适宜共轴布置,则两个动力需要错开位置进行,例如一个位于翼上,一个位于翼下。
38.图6显示了外翼变换的两个转轴线,均为绘图辅助线方向,外翼绕两个转轴线的旋转可通过第一模式变换机构8实现。左前动力系统6,左后动力系统7可以是转动舵机、伺服电机等,使外翼绕两个转轴线旋转的第一模式变换机构8可通过常规技术实现,例如在内机翼和外翼的连接处设有转轴,所述转轴可绕展向轴方向旋转,所述外翼和转轴转动连接,可绕转轴实现弦向转轴方向旋转,因此第一模式变换机构8的具体实施方式在此不再赘述。
39.实施例2
40.该实施例采用外翼水平面内旋转方案,动力系统同步倾转,与实施例1的不同在于模式变换机构;如图7、8所示,该模式变换机构包括第二模式变换机构11、左前动力系统6的第三模式变换机构12、左后动力系统7的第四模式变换机构13,第二模式变换机构11实现机翼外翼在水平面内的组合、分离,第三模式变换机构12、第四模式变换机构13实现动力系统绕展向轴方向的旋转,达成推力方向的方向变换。
41.为说明模式变换过程,绘制二个中间过程图描述,如图9-10所示,从地面起飞的垂直起降模式图7—》图9—》图10—》图8固定翼巡航模式的变换过程,该顺序倒排则为由固定翼巡航模式转变为垂起起降模式,完成从空中巡航降落的过程。
42.图7—》图9—》图10—》图8,在垂起起降模式下,飞行器垂直提升至预定模式转换飞行高度,左前外翼4,左后外翼5通过第二模式变换机构11分别绕第一转轴线16、第二转轴线17(外翼水平面内旋转转轴线,与z轴平行)反向同步旋转,夹角逐步减小,直至完全合并为一体化的外翼,左前动力系统6,左后动力系统7通过第三模式变换机构12、第四模式变换机构13分别绕第三转轴线18、第四转轴线19(沿外翼展向方向)旋转,逐步将垂直向下的推力转为向后,在此过程中,由于左前动力系统6,左后动力系统7沿机体向后的推力分量不断增加,飞行器逐步建立前向飞行速度,内翼1产生逐步增大的气动升力,对于动力系统提供升力的需求逐步减少,最终达到图8固定翼巡航状态。第一转轴线16、第二转轴线17、第三转轴线18、第四转轴线19如图11所示。
43.所示第二模式变换机构11、左前动力系统6的第三模式变换机构12、左后动力系统7的第四模式变换机构13实现旋转为本领域常规技术,例如内机翼端部安装有与z轴方向平行的轴,所述外翼根部与该轴转动连接,因此其具体的实施方式在此不再累述。
44.外翼分割为两部分的方式有多种,翼型分割组合如图12所示,表示了4种翼型组合方式,翼型中间线为分割线,根据分割线位置大体可分为前后分割和上下分割两种,前后分割能够保持翼型厚度,上下分割翼型薄,顺气流阻力小于前后分割,图12(a)为翼型前后平面分割,图12(b)为翼型弧线分割保留后半翼型的前缘,图12(c)为翼型上下平面分割,图12(d)为翼型曲线分割形成两个相对完整的翼型。
45.注:坐标轴定义为x轴沿机体轴线向前,y轴沿机体轴线向右,z轴沿机体向下,左右定义为站在机尾后向机头方向看。
46.本发明提出的一种变构型垂直起降飞行器,是一种变构型高效率垂直飞行器,具备垂直起降模式和固定翼巡航模式两种飞行模式,垂直起降模式为四旋翼飞行器,巡航状态为固定翼飞行器,两种飞行模式复用一套动力系统,机翼外段在垂直起降阶段分为两片机翼,在固定翼模式组合到一起形成完整机翼,通过机翼的旋转、拼接、组合,在空中实现两种模式气动布局构型变换,本发明避免了传统复合翼垂直起降飞行器的缺点,同时具备多旋翼高悬停效率和固定翼的高速巡航飞行气动效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1