一种扑翼飞行器用扑动折叠运动机构
1.本发明涉及扑翼飞行器技术领域。
背景技术:
2.扑翼飞行器,在国防军事等领域有着重大的应用前景,成为各国的研究重点。在自然界中,鸟类通过折叠、扭转、扫掠来改变翅膀的运动状态,通过这些动作来实现翅膀的变形,以此来提高飞行效率,减少能量消耗,达到长时间飞行的目的。
3.鸟类翅膀的折叠运动是指沿着翅膀展向伸缩与弯曲,研究表明,扑翼飞行器采用仿生原理,扑动翼通过在扑动运动的基础上增加折叠运动(折叠翅膀)来实现翅膀的变形,使扑动翼在上扑过程中扑动翼的面积减小,可以有效降低上扑过程中产生的负升力,在下扑过程中扑动翼的面积增大,可以有效降增加扑动翼的升力,从而极大的提高其气动效率,实现像鸟类一样通过主动改变翅膀形状来提高飞行效率的目的。
4.现在的扑翼飞行器一般只有单纯的扑动运动,有少数扑动翼在扑动运动的基础上增加了折叠运动,但是目前扑动翼通过折叠来改变翅膀外形的方式一般是被动的,如申请号为cn201910117942.0,授权公告号为 cn109823532a的中国发明专利《一种可实现机翼被动折叠与扭转的机构》。
5.与主动变形相比,通过被动的折叠方式来改变扑动翼的外形存在很大的误差,以至于气动效率提升不甚理想。即使有一些扑动飞行器是通过主动控制来实现扑动翼的折叠运动,一般都是通过连杆结构实现,这样会使得整体的结构变重。
技术实现要素:
6.本发明要解决的技术问题是提供一种扑翼飞行器用扑动折叠运动机构,它具有质量轻、机动性好、飞行效率高等特点。
7.为解决上述技术问题,本发明所采取的技术方案是:一种扑翼飞行器用扑动折叠运动机构,其包括扑动折叠翼和扑动折叠驱动机构;扑动折叠翼主要由扑动翼和位于扑动翼外端的折叠翼组成;扑动折叠翼包括扑动臂,折叠臂,扑动翼骨架和翼膜,扑动臂的外端与折叠臂的内端铰接,以使折叠臂相对于扑动臂进行前后向往复折叠伸展运动,扑动翼骨架固定在扑动臂的上方,翼膜粘接在扑动翼骨架与折叠臂上,扑动翼骨架与其所支撑的翼膜形成扑动翼,折叠臂与其所支撑的翼膜形成折叠翼,折叠臂所支撑的翼膜部位形成折叠翼的前缘;扑动折叠驱动机构包括扑动折叠驱动机构安装架和设置在扑动折叠驱动机构安装架上的导向轴,扑动驱动机构和折叠驱动机构;扑动驱动机构包括偏心驱动结构和扑动驱动臂;偏心驱动结构包括偏心驱动齿轮,偏心轴连杆,摆臂和驱动连杆,扑动驱动臂的中部与导向轴转动连接;偏心驱动齿轮偏心设有偏心轴,偏心轴连杆14的一端与偏心轴转动连接;偏心轴连杆的另一端与摆臂的一端铰接,摆臂的另一端与驱动连杆的一端铰接,驱动
连杆的另一端与扑动驱动臂的一端铰接;当偏心驱动齿轮旋转时,偏心轴产生圆周运动,以使偏心轴连杆驱动摆臂往复运动,摆臂通过驱动连杆驱动扑动驱动臂绕导向轴产生往复扑动运动;折叠驱动机构包括同步驱动齿轮,滑块往复驱动结构和折叠驱动滑块;滑块往复驱动结构包括一对结构相同的拉绳驱动齿轮,拉绳和至少一个拉绳导向滑轮,拉绳驱动齿轮偏心设有拉绳连接结构,拉绳的一端固定在其中一个拉绳驱动齿轮的拉绳连接结构上,拉绳的另一端经拉绳导向滑轮折转后固定在其中另一个拉绳驱动齿轮的拉绳连接结构上,两个拉绳驱动齿轮啮合连接,以使它们同步反向转动,两个拉绳驱动齿轮的拉绳连接结构相位相差180
°
,以使两个拉绳驱动齿轮同步反向转动时带动拉绳同步反方向运动,从而使拉绳产生往复运动,其中一个拉绳驱动齿轮与同步驱动齿轮传动连接;折叠驱动滑块包括滑块和折叠驱动臂,折叠驱动臂的一端与滑块铰接,滑块与导向轴滑动连接,且固定在拉绳上,拉绳产生往复运动时,带动折叠驱动滑块沿导向轴往复滑动;同步驱动齿轮与偏心驱动齿轮啮合连接,以使扑动折叠翼的扑动运动与折叠伸展运动同步进行,扑动臂的内端与扑动驱动臂的另一端固定连接,折叠臂与折叠驱动臂的另一端铰接;驱动电机驱动偏心驱动齿轮转动,使扑动驱动臂驱动扑动臂产生扑动运动,偏心驱动齿轮驱动同步驱动齿轮转动,以使折叠驱动臂驱动折叠臂进行与扑动臂同步的往复折叠伸展运动,扑动翼在上扑时,折叠翼进行折叠运动,以减小扑动折叠翼的面积,从而降低上扑过程中产生的负升力,扑动翼在下扑时,折叠翼进行伸展运动,以增大扑动折叠翼的面积,从而增加下扑过程中产生的升力。
8.本发明进一步改进在于:其中一个拉绳驱动齿轮与同步驱动齿轮之间设有拉绳驱动齿轮传动轴26,拉绳驱动齿轮传动轴将它们同轴心固定连接在一起以形成传动连接。
9.拉绳导向滑轮为两个。
10.折叠臂通过三角形铰接架与折叠驱动臂铰接,角形连接架包括两个铰接杆,两个铰接杆的一端铰接形成折叠驱动臂铰接端,其中一个铰接杆与折叠臂及扑动臂同轴心铰接,其中另一个铰接杆与折叠臂铰接,从而使两个铰接杆与部分折叠臂形成三角形铰接架,折叠驱动臂与三角形铰接架的折叠驱动臂铰接端铰接,从而使折叠驱动臂更加柔顺的驱动折叠臂进行往复折叠伸展运动。
11.采用上述技术方案所产生的有益效果在于:扑动折叠翼主要由扑动翼和位于扑动翼外端的折叠翼组成;扑动折叠运动机构使扑动驱动臂驱动扑动臂产生扑动运动,同时使折叠驱动臂驱动折叠臂进行与扑动臂同步的往复折叠伸展运动,从而使扑动翼在上扑时,折叠翼进行折叠运动,以减小扑动折叠翼的面积,从而降低上扑过程中产生的负升力,扑动翼在下扑时,折叠翼进行伸展运动,以增大扑动折叠翼的面积,从而增加下扑过程中产生的升力,以提高其气动效率,采用了鸟类通过主动改变翅膀形状来提高飞行效率的仿生原理;用拉绳代替传统的连杆来实现扑动臂的折叠伸展运动,较采用连杆结构方式相比,具有结构简单合理,质量轻、机动性好等优点。
附图说明
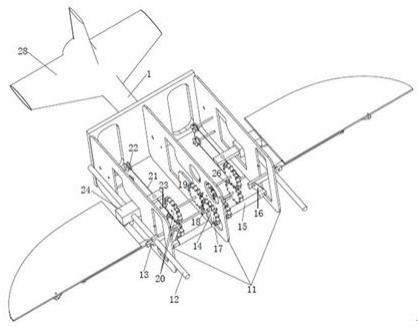
12.图1是扑翼飞行器的结构示意图;图2是图1中扑动折叠扑翼装置的结构示意图;图3是图1中折叠翼处于伸展状态时扑动折叠运动机构的结构示意图;图4是图3去掉翼膜后的结构示意图;图5是图1中折叠翼处于折叠状态时扑动折叠运动机构的结构示意图;图6是图5去掉翼膜后的结构示意图。
13.在附图中:1. 机身;2. 驱动电机;3. 扑动翼;4. 折叠翼;5. 扑动臂;6. 折叠臂;7. 第一纵梁;8. 第二纵梁;9. 纵梁后端连接梁;10. 斜梁;11. 动折叠驱动机构安装架;12. 导向轴;13. 扑动驱动臂;14. 偏心轴连杆;15. 摆臂;16. 驱动连杆;17. 偏心驱动齿轮;18. 偏心轴;19. 同步驱动齿轮;20. 拉绳驱动齿轮;21. 拉绳;22. 拉绳导向滑轮;23. 拉绳驱动齿轮;24. 滑块;25. 折叠驱动臂;26. 拉绳驱动齿轮传动轴;27. 铰接杆;28. 尾舵。
14.本技术中的方位描述以扑翼飞行器的方位为准,扑翼飞行器飞行的方向为前方,上方为扑翼飞行器飞行状态的上方。
具体实施方式
15.下面将结合附图和具体实施例对本发明进行进一步详细说明。
16.为了便于说明,将扑翼飞行器作为实施例进行详细介绍本发明中使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接、粘贴等常规手段,在此不再详述。
17.由图1~6所示的实施例可知,本实施例包括机身1,飞行控制系统和扑翼装置,扑翼装置为扑动折叠扑翼装置,其包括驱动电机2【微型直流行星减速电机,型号:pg28-385】和一对结构相同的扑动折叠运动机构,扑动折叠运动机构包括扑动折叠翼和扑动折叠驱动机构;扑动折叠翼主要由扑动翼3和位于扑动翼3外端的折叠翼4组成;扑动折叠翼包括扑动臂5,折叠臂6,扑动翼骨架和翼膜,扑动臂5的外端与折叠臂6的内端铰接,以使折叠臂6相对于扑动臂5进行前后向往复折叠伸展运动,扑动翼骨架固定在扑动臂5的上方,扑动翼骨架包括第一纵梁7,第二纵梁8,纵梁后端连接梁9和斜梁10,第二纵梁8的前端固定在扑动臂5与折叠臂6向上伸出的铰接轴上,第一纵梁7的前端通过竖梁图中未示出固定在扑动臂5上,纵梁后端连接梁9的两端将第一纵梁7与第二纵梁8的后端固定连接在一起,斜梁10的前端与第二纵梁8的前端固定在一起,斜梁10由前至后向外侧倾斜翼膜粘接在扑动翼骨架与折叠臂6上,扑动翼骨架与其所支撑的翼膜形成扑动翼3,折叠臂6与其所支撑的翼膜形成折叠翼4,折叠臂6所支撑的翼膜部位形成折叠翼4的前缘;扑动翼骨架固定在扑动臂5的上方,从而在折叠翼4与扑动翼3连接部位形成折叠空间,以使折叠翼4进行前后折叠运动时与扑动翼3产生相对折叠与伸展状态;扑动折叠驱动机构包括扑动折叠驱动机构安装架11和设置在扑动折叠驱动机构安装架11上的导向轴12,扑动驱动机构和折叠驱动机构;
扑动驱动机构包括偏心驱动结构和扑动驱动臂13;偏心驱动结构包括偏心驱动齿轮17,偏心轴连杆14,摆臂15和驱动连杆16,扑动驱动臂13的中部与导向轴12转动连接;偏心驱动齿轮17偏心设有偏心轴18,偏心轴连杆14的一端与偏心轴18转动连接;偏心轴连杆14的另一端与摆臂15的一端铰接,摆臂15的另一端与驱动连杆16的一端铰接,驱动连杆16的另一端与扑动驱动臂13的一端铰接;当偏心驱动齿轮17旋转时,偏心轴18产生圆周运动,以使偏心轴连杆14驱动摆臂15往复运动,摆臂15通过驱动连杆16驱动扑动驱动臂13绕导向轴12产生往复扑动运动;通过改变偏心轴连杆14或者驱动连杆16的长度,可以改变扑动折叠翼的扑动幅度,从而可以根据需要,有效的改变其扑动幅度;折叠驱动机构包括同步驱动齿轮19,滑块往复驱动结构和折叠驱动滑块;滑块往复驱动结构包括一对结构相同的拉绳驱动齿轮20,拉绳21和至少一个拉绳导向滑轮22,拉绳驱动齿轮20偏心设有拉绳连接结构23,拉绳21的一端固定在其中一个拉绳驱动齿轮20的拉绳连接结构23上,拉绳21的另一端经拉绳导向滑轮22折转后固定在其中另一个拉绳驱动齿轮20的拉绳连接结构23上,两个拉绳驱动齿轮20啮合连接,以使它们同步反向转动,两个拉绳驱动齿轮20的拉绳连接结构23相位相差180
°
,以使两个拉绳驱动齿轮20同步反向转动时带动拉绳21同步反方向运动,从而使拉绳21产生往复运动,其中一个拉绳驱动齿轮20与同步驱动齿轮19传动连接;折叠驱动滑块包括滑块24和折叠驱动臂25,折叠驱动臂25的一端与滑块24铰接,滑块24与导向轴12滑动连接,且固定在拉绳21上,拉绳21产生往复运动时,带动折叠驱动滑块24沿导向轴12往复滑动;同步驱动齿轮19与偏心驱动齿轮17啮合连接,以使扑动折叠翼的扑动运动与折叠伸展运动同步进行,扑动臂5的内端与扑动驱动臂13的另一端固定连接,折叠臂6与折叠驱动臂25的另一端铰接;驱动电机2驱动偏心驱动齿轮17转动,使扑动驱动臂13驱动扑动臂5产生扑动运动,偏心驱动齿轮17驱动同步驱动齿轮19转动,以使折叠驱动臂25驱动折叠臂6进行与扑动臂5同步的往复折叠伸展运动,扑动翼3在上扑时,折叠翼4进行折叠运动,以减小扑动折叠翼的面积,从而降低上扑过程中产生的负升力,扑动翼3在下扑时,折叠翼4进行伸展运动,以增大扑动折叠翼的面积,从而增加下扑过程中产生的升力;从而极大的提高其气动效率,实现像鸟类一样通过主动改变翅膀形状来提高飞行效率的目的;通过改变滑块24沿导向轴12往复滑动的距离可以改变其折叠角度,该往复滑动距离的调整通过改变拉绳驱动齿轮20与偏心驱动齿轮17的转速比实现;一对结构相同的扑动折叠运动机构左右对称设置,以使两个扑动折叠翼对称设置在机身1的左侧和右侧;设置在左侧的扑动折叠运动机构为左侧扑动折叠运动机构,设置在右侧的扑动折叠运动机构为右侧扑动折叠运动机构,驱动电机2驱动左侧扑动折叠运动机构与右侧扑动折叠运动机构同步运转,以使两个扑动折叠翼分别产生同步的扑动运动和折叠伸展运动。
18.其中一个拉绳驱动齿轮20与同步驱动齿轮19之间设有拉绳驱动齿轮传动轴26,拉绳驱动齿轮传动轴26将它们同轴心固定连接在一起以形成传动连接。
19.左侧扑动折叠运动机构的偏心驱动齿轮17与右侧扑动折叠运动机构的偏心驱动齿轮17之间设有偏心驱动齿轮传动轴(图中未示出),偏心驱动齿轮传动轴将它们同轴心固
定连接在一起以形成传动连接,驱动电机2的转轴与其中一个偏心驱动齿轮17通过齿轮传动结构传动连接,从而驱动两个扑动折叠运动机构同步运转,使两个扑动折叠翼分别产生同步的扑动运动和折叠伸展运动。
20.拉绳导向滑轮22为两个。
21.折叠臂6通过三角形铰接架与折叠驱动臂25铰接,角形连接架包括两个铰接杆27,两个铰接杆27的一端铰接形成折叠驱动臂铰接端,其中一个铰接杆27与折叠臂6及扑动臂5同轴心铰接,其中另一个铰接杆27与折叠臂6铰接,从而使两个铰接杆27与部分折叠臂6形成三角形铰接架,折叠驱动臂25与三角形铰接架的折叠驱动臂铰接端铰接,从而使折叠驱动臂25更加柔顺的驱动折叠臂6进行往复折叠伸展运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1