倾斜摄影无人机落地稳定器的制作方法
1.本实用新型属于无人机技术领域,特别是涉及一种倾斜摄影无人机落地稳定器。
背景技术:
2.现有的摄影无人机进行降落时极易发生无人机翻倒的情况,对于摄影无人机来讲,出现翻倒情况对摄影作品的品质影响极大,在此种形势下为保证摄影作品的品质就需要操作人员有极高的操作技术,且对降落点的选取也非常严苛,对于实际操作要求过高。
技术实现要素:
3.为了解决上述背景技术中存在的问题,本实用新型提供一种倾斜摄影无人机落地稳定器,该稳定器操作简单,可任意选取降落地点,摄影质量高,使用方便。
4.本实用新型解决其技术问题采取的技术方案是:一种倾斜摄影无人机落地稳定器,包括机身、摄影组件、悬挂组件、四个悬臂、四个螺旋桨及四个支撑腿;四个所述悬臂分别外端向上倾斜设置在机身上部的四个拐角位置,四个所述螺旋桨分别转动安装在四个悬臂的端部,所述机身下表面固定设置有四个固定座,四个所述支撑腿分别固定安装在四个所述固定座上,所述机身底面中部位置开设有安装槽,所述悬挂组件活动安装在安装槽中,所述摄影组件悬挂安装在悬挂组件上。
5.所述机身内下部位置开设有封闭的平衡腔室,所述机身的平衡腔室上方处内嵌有高速电机,所述高速电机的驱动端向下探进平衡腔室中,高速电机的驱动端上安装有平衡盘。
6.所述摄影组件包括球座、连接杆、安装板及倾斜摄影机;所述球座为半球型,球座圆弧面向下放置在悬挂组件中,连接杆上端与球座底面中部连接,连接杆下端固定接设有安装板,所述安装板的下表面上安装有倾斜摄影机,所述摄影组件依托球座的弧面活动安装在悬挂组件中,并能够在悬挂组件中进行多角度晃动,进而维持倾斜摄影机在拍摄过程中的相对平衡。
7.所述悬挂组件包括承托板、承托座及四个托架;所述承托板上端通过伸缩座安装在安装槽中,伸缩座带动承托板上下移动,四个所述托架绕承托板中心线均布设置在承托板的下表面上,每个所述托架均向承托板中心方向弯折设置,所述承托座固定安装在托架上,并与每个托架均固定相连,所述承托座与球座仿形设置,便于球座在承托座中进行多角度晃动。
8.所述支撑腿包括壳身、一级管身、二级管身、液压杆及触地球;所述壳身上端部开设有用于支撑腿整体安装的固定槽,所述固定槽用于扣装在固定座外侧,所述壳身下端设有内腔,并由外向内依次组装有一级管身、二级管身及液压杆,所述一级管身及二级管身均活动安装在壳身内组成套筒式外壳,所述液压杆的基座端固定安装在壳身的内腔内,液压杆的伸缩端探进二级管身中并与二级管身固定连接,所述二级管身外侧底端位置设置有触地球,所述触地球外表面设置有压力传感器,用以感知降落情况进而控制支撑腿的伸缩长
度。
9.本实用新型的有益效果:该稳定器将原有支撑腿的固定长度结构改变为伸缩结构,降低了对技术人员操作技术的限制,同时降低了对降落地点选取的要求,可以将摄影无人机应用的更广泛;此外,该稳定器在机身中加设平衡盘使无人机在飞行过程中更加稳定,减少了无人机在提速和降速过程中惯性对摄影机稳定的影响,进而提高了摄影质量。
附图说明
10.在附图中:
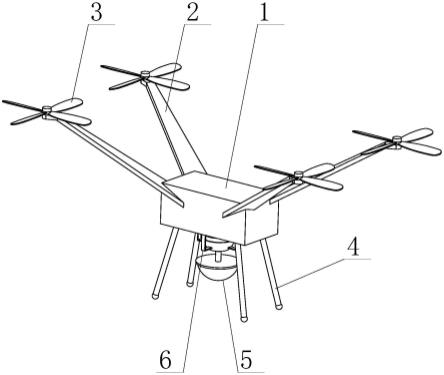
11.图1是本实用新型整体结构示意图;
12.图2是本实用新型底部结构示意图;
13.图3是本实用新型摄影组件安装效果示意图;
14.图4是图3中a部局部放大图;
15.图5是本实用新型摄影组件及悬挂组件连接关系示意图;
16.图6是本实用新型平衡盘安装示意图;
17.图7是本实用新型剖面视图;
18.图8是本实用新型支撑腿收缩状态结构示意图;
19.图9是本实用新型支撑腿伸展状态结构示意图;
20.图中:
21.1、机身;2、悬臂;3、螺旋桨;4、支撑腿;5、摄影组件;6、悬挂组件;7、高速电机;8、平衡盘;9、伸缩座;11、固定座;12、平衡腔室;13、安装槽;41、壳身;42、固定槽;43、一级管身;44、二级管身;45、液压杆;46、触地球;51、球座;52、连接杆;53、安装板;54、倾斜摄影机;61、承托板;62、托架;63、承托座。
具体实施方式
22.现结合附图对本实用新型作进一步详细的说明。附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
23.一种倾斜摄影无人机落地稳定器,包括机身1、摄影组件5、悬挂组件6、四个悬臂2、四个螺旋桨3及四个支撑腿4;四个所述悬臂2分别外端向上倾斜设置在机身1上部的四个拐角位置,四个所述螺旋桨3分别转动安装在四个悬臂2的端部,所述机身1下表面固定设置有四个固定座11,四个所述支撑腿4分别固定安装在四个所述固定座11上,所述机身1底面中部位置开设有安装槽13,所述悬挂组件6活动安装在安装槽13中,所述摄影组件5悬挂安装在悬挂组件6上。
24.所述机身1内下部位置开设有封闭的平衡腔室12,所述机身1的平衡腔室12上方处内嵌有高速电机7,所述高速电机7的驱动端向下探进平衡腔室12中,高速电机7的驱动端上安装有平衡盘8,启动高速电机7带动平衡盘8旋转,利用平衡盘8自身的离心惯性来维持机身1的水平平衡。
25.所述摄影组件5包括球座51、连接杆52、安装板53及倾斜摄影机54;所述球座51为减轻负重设置为半球型,球座51圆弧面向下放置在悬挂组件6中,连接杆52上端与球座51底面中部连接,连接杆52下端固定接设有安装板53,所述安装板53的下表面上安装有倾斜摄
影机54,所述摄影组件5依托球座51的弧面活动安装在悬挂组件6中,并能够在悬挂组件6中进行多角度晃动,进而维持倾斜摄影机54在拍摄过程中的相对平衡。
26.所述悬挂组件6包括承托板61、承托座63及四个托架62;所述承托板61上端通过伸缩座9安装在安装槽13中,伸缩座9带动承托板61上下移动,四个所述托架62绕承托板61中心线均布设置在承托板61的下表面上,每个所述托架62均向承托板61中心方向弯折设置,所述承托座63固定安装在托架62上,并与每个托架62均固定相连,所述承托座63与球座51仿形设置,便于球座51在承托座63中进行多角度晃动。
27.所述支撑腿4包括壳身41、一级管身43、二级管身44、液压杆45及触地球46;所述壳身41上端部开设有用于支撑腿4整体安装的固定槽42,所述固定槽42用于扣装在固定座11外侧,所述壳身41下端设有内腔,并由外向内依次组装有一级管身43、二级管身44及液压杆45,所述一级管身43及二级管身44均活动安装在壳身41内组成套筒式外壳,所述液压杆45的基座端固定安装在壳身41的内腔内,液压杆45的伸缩端探进二级管身44中并与二级管身44固定连接,所述二级管身44外侧底端位置设置有触地球46,所述触地球46外表面设置有压力传感器,用以感知降落情况进而控制支撑腿4的伸缩长度。
28.工作原理:
29.该稳定器在工作时,高速电机7带动平衡盘8进行高速转动,进而产生一个水平的离心惯性,进而维持机身1保持水平,而后启动无人机进行起飞,即可维持机身1始终保持一个水平姿态,减少无人机的提速与降速的惯性对飞行稳定的影响。
30.在无人机飞行过程中,为减少飞行颠簸对摄影的影响,摄影组件5采用悬挂方式安装在悬挂组件6上,球座51可在承托座63中进行自由的多角度晃动,在重力作用下,倾斜摄影机54可始终保持稳定,减少无人机自身飞行姿态改变对其的影响。
31.在无人机降落过程中,令无人机在距地面移动高度进行悬停飞行,启动液压杆45进行伸长,促使支撑腿4进行伸长,每个支撑腿4下端的触地球46上设置的压力传感器将感知支撑腿4端部的触地压力,当压力达到一定数值时,控制液压杆45停止伸长,进而完成无人机的降落。
32.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1