一种可提高遥感测绘无人机降落稳定性支架的制作方法
本技术涉及无人机测绘,特别涉及一种可提高遥感测绘无人机降落稳定性支架。
背景技术:
1、遥感测绘无人机在地质勘测工作中,具备勘测效率高、使用成本低、方便操作和维护的特点,极大的提高了地质勘探人员的工作效率,降低了地质勘探人员的工作强度,现有的部分遥感测绘无人机在完成使用时,可以控制其自动返回,然后降落至地面,在遥感测绘无人机降落时,由于底部设有缓冲机构,在无人机降落着陆在倾斜的地面上时,无人机的稳定性较差,会出现机身回弹幅度较大导致的遥感测绘无人机翻倒的现象,进而会导致遥感测绘无人机的叶轮与地面发生碰撞,因此,针对以上问题提出一种可提高遥感测绘无人机降落稳定性支架。
技术实现思路
1、本实用新型要解决的技术问题克服现有的缺陷,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
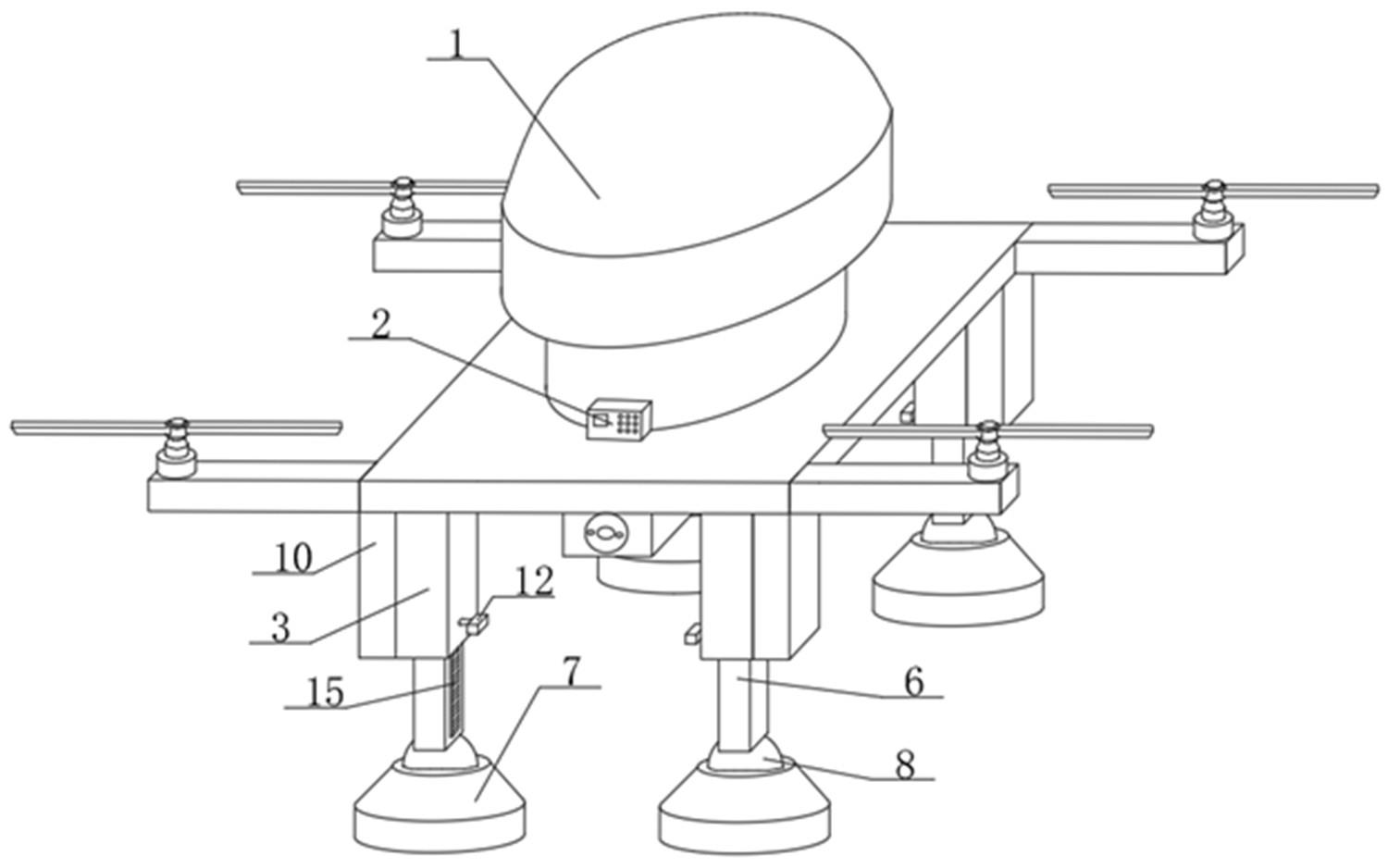
3、一种可提高遥感测绘无人机降落稳定性支架,包括遥感测绘无人机,所述遥感测绘无人机外侧固定连接有控制器,所述遥感测绘无人机底端设有套杆,所述套杆内侧底端滑动连接有活塞块,所述活塞块底端固定连接有内杆,且内杆贯穿套杆,所述内杆底端设有底座。
4、作为本实用新型的进一步改进,所述活塞块顶端固定连接有第一弹簧,且第一弹簧的另一端与套杆固定连接,这种设置在装置降落时,起到了缓冲的作用。
5、作为本实用新型的进一步改进,所述底座内侧顶端转动连接有球块,且球块与内杆固定连接,这种设置在装置降落在倾斜地面上时,保证了装置与地面的稳定接触。
6、作为本实用新型的进一步改进,所述套杆外侧一端滑动连接有拉杆,且拉杆贯穿套杆,所述拉杆外侧一端固定连接有滑板,且滑板与套杆滑动连接,所述拉杆外侧另一端设有第二弹簧,且第二弹簧与滑板和套杆固定连接,所述内杆外侧一端固定连接有齿呈直角梯台状设置的齿条,且齿条与拉杆啮合连接,这种设置在装置降落后进行缓冲时,保证了内杆收在套杆内后的稳定,从而避免了装置降落后出现大幅度回弹的现象。
7、作为本实用新型的进一步改进,所述底座底端中心位置设有距离传感器,且距离传感器与底座固定连接,这种设置可以分别对四个底座到地面的距离进行检测。
8、作为本实用新型的进一步改进,所述套杆外侧另一端固定连接有滑块,所述滑块外侧滑动连接有固定罩,且固定罩与遥感测绘无人机固定连接,所述滑块底端固定连接有多级电动伸缩杆,且多级电动伸缩杆与固定罩固定连接,这种设置可以对四个底座到地面的距离进行自动调整,以此保证了装置降落后的平稳。
9、与现有技术相比,本实用新型具有如下有益效果:
10、1、一种可提高遥感测绘无人机降落稳定性支架,通过设置的内杆、拉杆和齿条,在遥感测绘无人机完成测绘着陆在倾斜地面上时,在底座接触地面后,通过装置下降时产生的冲击力,底座会与球块发生转动,此时底座的底部会与地面接触,活塞块此时会压缩第一弹簧进行缓冲,此时活塞块会带动内杆收在套杆内,此时齿条直角梯台状设置的齿的斜边会与拉杆滑动,拉杆此时会带动滑板压缩第二弹簧,然后复位,在活塞块无法继续压缩第一弹簧时,在第一弹簧的弹力恢复下,拉杆会与齿条直角梯台状齿的直角边卡在一起,此时实现了对内杆的定位,活塞块此时不会复位,装置此时不会发生较大幅度的回弹,此时完成了遥感测绘无人机缓冲后的稳定降落,通过以上操作,在遥感测绘无人机降落在倾斜的地面上时,通过拉杆与齿条卡在一起对收在套杆内的内杆进行限位,在实现对装置进行缓冲的同时,最大程度的避免了大幅度回弹导致的装置翻倒的现象,进而避免了遥感测绘无人机的叶轮与地面撞在一起现象的发生,保证了装置降落后的稳定。
11、2、一种可提高遥感测绘无人机降落稳定性支架,通过设置的距离传感器、多级电动伸缩杆和滑块,在遥感测绘无人机降落的过程中,在控制器的控制下,四个距离传感器会分别对四个底座到地面的距离进行检测,在检测距离不同时,控制器会控制检测数据最大的三个距离传感器所对应的多级电动伸缩杆收缩,此时对应的滑块会带动对应的套杆下移,在检测数据最大的三个距离传感器检测的数值与检测数据最小的距离传感器检测的数值相同时,对应的多级电动伸缩杆停止,接着控制装置着陆即可,此时在装置着陆在倾斜的地面上后,遥感测绘无人机不会发生倾斜,进一步保证了装置着陆时的平稳,最大程度的避免了装置着陆后发生翻倒的现象。
技术特征:
1.一种可提高遥感测绘无人机降落稳定性支架,包括遥感测绘无人机(1),其特征在于:所述遥感测绘无人机(1)外侧固定连接有控制器(2),所述遥感测绘无人机(1)底端设有套杆(3),所述套杆(3)内侧底端滑动连接有活塞块(4),所述活塞块(4)底端固定连接有内杆(6),且内杆(6)贯穿套杆(3),所述内杆(6)底端设有底座(7);所述套杆(3)外侧一端滑动连接有拉杆(12),且拉杆(12)贯穿套杆(3),所述拉杆(12)外侧一端固定连接有滑板(13),且滑板(13)与套杆(3)滑动连接,所述拉杆(12)外侧另一端设有第二弹簧(14),且第二弹簧(14)与滑板(13)和套杆(3)固定连接,所述内杆(6)外侧一端固定连接有齿呈直角梯台状设置的齿条(15),且齿条(15)与拉杆(12)啮合连接;所述底座(7)底端中心位置设有距离传感器(16),且距离传感器(16)与底座(7)固定连接。
2.根据权利要求1所述的一种可提高遥感测绘无人机降落稳定性支架,其特征在于:所述活塞块(4)顶端固定连接有第一弹簧(5),且第一弹簧(5)的另一端与套杆(3)固定连接。
3.根据权利要求1所述的一种可提高遥感测绘无人机降落稳定性支架,其特征在于:所述底座(7)内侧顶端转动连接有球块(8),且球块(8)与内杆(6)固定连接。
4.根据权利要求1所述的一种可提高遥感测绘无人机降落稳定性支架,其特征在于:所述套杆(3)外侧另一端固定连接有滑块(9),所述滑块(9)外侧滑动连接有固定罩(10),且固定罩(10)与遥感测绘无人机(1)固定连接,所述滑块(9)底端固定连接有多级电动伸缩杆(11),且多级电动伸缩杆(11)与固定罩(10)固定连接。
技术总结
本技术公开了一种可提高遥感测绘无人机降落稳定性支架,包括遥感测绘无人机,所述遥感测绘无人机外侧固定连接有控制器,所述遥感测绘无人机底端设有套杆,所述套杆内侧底端滑动连接有活塞块,所述活塞块底端固定连接有内杆,且内杆贯穿套杆,所述内杆底端设有底座,通过设置的内杆、拉杆和齿条,在遥感测绘无人机完成测绘着陆在倾斜地面上时,通过拉杆与齿条卡在一起对收在套杆内的内杆进行限位,在实现对装置进行缓冲的同时,最大程度的避免了大幅度回弹导致的装置翻倒的现象,进而避免了遥感测绘无人机的叶轮与地面撞在一起现象的发生,保证了装置降落后的稳定。
技术研发人员:崔冰,严兴鹏,王楚维,王娜
受保护的技术使用者:青海省地质测绘地理信息院
技术研发日:20220722
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!