飞行器、特别是个人空中机动飞行器或无人机、环形螺旋桨单元以及包括该单元的船的制作方法
本发明涉及飞行器,特别是涉及个人空中机动飞行器和无人机。本发明还涉及可用在这种类型的飞行器中的环形螺旋桨单元,以及使用这种环形螺旋桨单元的船。
背景技术:
1、近年来,已提出各种类型的无人机和小型飞行器用于个人空中机动。迄今为止出现的解决方案中的共同缺点在于推进转子的低效率、用于驱动转子的马达系统的构造复杂以及相对降低的自主性。
2、发明人之一pietro perlo多年来一直致力于旨在实现高效推进转子的研究和调查。例如,文献ep 1 524 189 a1涉及一种微型飞行器,其可与移动电话相关联,并且包括基本上平面的结构,其中结合有四个涵道推进转子,这些转子基本上彼此共面。这四个推进转子中的每一个包括旋转环,其可旋转地安装在穿过该平面结构形成的具有竖直轴线的圆柱形开口内,并且限定用于由转子产生的气流的引导涵道。这四个转子中的每一个包括至少一个叶片,该叶片从该旋转环的主体朝向转子的中心轴线径向延伸。上述已知的解决方案是为微小尺寸的飞行器开发,并且因此,没有涉及在例如旨在用于运输负载(例如,用于递送包裹)的自驾驶无人机或者用于个人空中移动的飞行器的情况下遇到的更重要的问题的解决方案。
3、相同申请人已经在文件wo 2020/261102中提出了将上述概念应用于个人空中机动飞行器的一个示例。
4、从us2020/062385a1已知一种具有权利要求1的前序部分中表明的特征的飞行器。该文献中描述的飞行器具有由与围绕转子施加的一个或多个带的外表面摩擦接合的齿轮或齿辊驱动的转子。
5、然而,在jp2001097288a中示意性地例示了用于驱动直升机转子的带传动装置,但是没有任何关于可如何具体实施该解决方案的解释。
6、us2006/196991 a1和us2018/178898 a1中例示了其他已知的解决方案。
7、本发明的目的
8、本发明的目的在于改进wo 2020/261102中提出的解决方案。
9、特别地,本发明的一个目的在于生产具有推进转子的驱动系统的个人空中机动飞行器或无人机,该驱动系统的特征在于高效率,特别是在以下方面,即:对于与推进转子的直径相同的值,具有高推力/重量比。
10、本发明的另一个目的在于提出一种上述类型的飞行器,其中,推进转子的驱动系统的特征在于极低的噪声水平。
11、本发明的另一个目的在于提供一种上述类型的飞行器,其中,推进转子的驱动系统构造简单且具有低成本,并且同时可靠。
12、本发明的再一目的在于提出用于具有极高升力特性和防失速特性的个人空中机动飞行器的一系列优选构造。
技术实现思路
1、为了实现一个或多个前述目的,本发明涉及一种具有权利要求1中表明的特征的飞行器。
2、本发明的其他优选的特性和优点在从属权利要求中表明。
3、本发明还涉及一种根据权利要求39的环形螺旋桨单元。根据本发明的环形螺旋桨单元可用在任何类型的交通工具中,并且特别是也可用在船中。
技术特征:
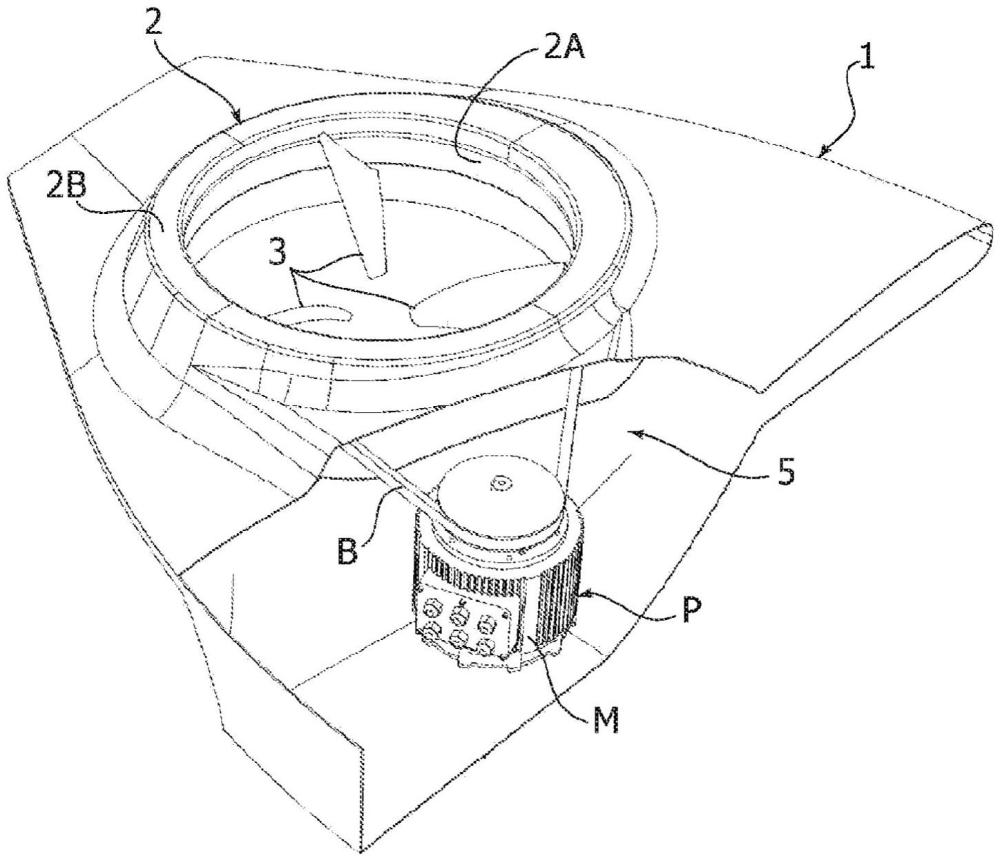
1.一种飞行器,特别是个人空中机动飞行器或无人机,包括:
2.根据权利要求1所述的飞行器,其特征在于,所述马达单元包括电动马达(m)。
3.根据权利要求1所述的飞行器,其特征在于,所述马达单元(p)包括电动马达(m)和减速器(r)。
4.根据权利要求1所述的飞行器,其特征在于,所述带(b)具有形状为梯形的剖面,并且以形状耦合的方式接收在所述转子环(2a)的所述外周向表面(20c)的周向腔(7)内。
5.根据权利要求1所述的飞行器,其特征在于,所述带具有结合一个或多个金属材料的线的弹性材料的主体。
6.根据权利要求1所述的飞行器,其特征在于,所述转子环(2a)通过插入一个或多个弹性板片(s、t)而被可旋转地支撑在所述周向凹部(9)内,所述弹性板片(s、t)周向地布置在所述转子环(2a)的主体的上表面(20a)上和下表面(20b)上,并且与所述凹部(9)的面对的固定壁(10a、10c)协作。
7.根据权利要求1所述的飞行器,其特征在于,所述一个或多个弹性板片(s)为波形板片,所述波形板片构造成由于所述转子环(2a)的旋转而产生为所述转子环(2a)提供空气支撑的气流。
8.根据权利要求6所述的飞行器,其特征在于,所述一个或多个弹性板片(t、t1)限定周向盘形弹簧(t),所述周向盘形弹簧(t)与所述转子环(2a)的上表面(20a)和下表面(20b)中的每一个相关联,并且与面向它们的固定壁协作。
9.根据权利要求8所述的飞行器,其特征在于,所述盘形弹簧(t)由具有多个凹口(11)的金属板片的一个或多个部分构成,所述多个凹口(11)限定多个部分(12),所述多个部分(12)彼此分开并且在其径向内侧上具有构造成执行盘形弹簧部分的功能的折叠边缘(13)。
10.根据权利要求1所述的飞行器,其特征在于,所述转子环(2a)借助于具有滚动球(17)或滚子的轴承(14)的一个或多个周向阵列而被可旋转地支撑在所述凹部(9)内。
11.根据权利要求10所述的飞行器,其特征在于,设置具有滚动球的轴承(14)的上部周向阵列,从而使所述球与所述转子环(2a)的上周向表面(20a)或外侧向表面(20c)接触,以及具有滚动球的支撑件(14)的下部周向阵列,所述球与所述转子环(2a)的下周向表面(20b)或外侧向表面(20c)接触。
12.根据权利要求1所述的飞行器,其特征在于,至少一个横杆(17)沿直径方向延伸穿过每个环形螺旋桨(2)的中心开口,所述杆使其相对端刚性地连接到所述固定结构,并且承载销(16),连接到所述转子环(2a)的轮毂(15)旋转地安装在所述销(16)上。
13.根据权利要求12所述的飞行器,其特征在于,前述的旋转轮毂(15)借助于所述叶片(3)或借助于辐条(22)来刚性地连接到所述转子环(2a)。
14.根据权利要求12所述的飞行器,其特征在于,每个横杆(17)具有椭圆形剖面。
15.根据权利要求1所述的飞行器,其特征在于,所述飞行器包括结合环形螺旋桨(2)的一个或多个机翼表面(31、32、32a),所述环形螺旋桨(2)的转子环由一个或多个马达单元(p)借助于相应的带传动装置(5)单独或成组地驱动。
16.根据权利要求15所述的飞行器,其特征在于,所述飞行器包括尾部,所述尾部设置有具有水平轴线的一个或多个环形螺旋桨(2),所述环形螺旋桨(2)的转子环由一个或多个马达单元(p)借助于相应的带传动装置(5)单独或成组地控制。
17.根据前述权利要求中任一项所述的飞行器,其特征在于,所述飞行器包括单个盘形机翼表面(31)。
18.根据权利要求1所述的飞行器,其特征在于,相同的环形螺旋桨(2)由相对于所述环形螺旋桨(2)布置在相对侧上的两个电动马达(m)借助于单个传动带(b)来驱动,所述传动带(b)接合所述环形螺旋桨的所述转子环(2a)以及相应地由所述两个电动马达(m)驱动的两个带轮(6)。
19.根据权利要求1所述的飞行器,其特征在于,环形螺旋桨(2)由位于所述环形螺旋桨的一侧上的电动马达(m)借助于传动带(b)来驱动,所述传动带(b)接合所述环形螺旋桨的所述转子环(2a)和由所述电动马达驱动的带轮(6)以及布置在所述环形螺旋桨的相对侧上的辅助带轮(6'),所述辅助带轮(6')由带张紧构件可自由旋转地支撑。
20.根据权利要求1所述的飞行器,其特征在于,所述飞行器具有带有两个环形螺旋桨(2)或两组环形螺旋桨的构造,所述环形螺旋桨布置在所述飞行器(100)的相对端处,并且具有彼此重合且平行于所述飞行器的纵向轴线的轴线,使得所述飞行器能够以竖直姿态起飞和降落,即在其纵向轴线竖直定向的情况下起飞和降落,但也能够采取水平飞行姿态。
21.根据权利要求20所述的飞行器,其特征在于,所述飞行器具有拥有卵形构造的支撑结构(30),以在所述飞行器(100)的相对端处的环形螺旋桨(2)或环形螺旋桨组之间传送空气流。
22.根据权利要求21所述的飞行器,其特征在于,所述飞行器具有:配备有座椅(70)和驾驶控制装置的倾斜机舱,所述机舱构造成当所述飞行器的姿态在竖直姿态和水平姿态之间变化时,借助于重力而自动保持乘员和驾驶控制装置的相同姿态;以及包括惯性平台的致动器装置。
23.根据权利要求21所述的飞行器,其特征在于,襟翼(71)与每个环形螺旋桨(2)相关联,所述襟翼(71)构造和布置成引导由所述环形螺旋桨(2)产生的空气流。
24.根据权利要求21所述的飞行器,其特征在于,所述飞行器包括一个或两个盘形机翼(33a、33b),所述盘形机翼各自布置在所述支撑结构(30)的相应侧上并且与之隔开。
25.根据权利要求21所述的飞行器,其特征在于,所述飞行器包括一个或两个盘形机翼,相对于水平飞行状态,所述盘形机翼以双翼飞机构造布置在所述机舱上方和下方,并且与之隔开。
26.根据权利要求21所述的飞行器,其特征在于,所述飞行器包括一个或两个机翼,所述机翼是:
27.根据权利要求24所述的飞行器,其特征在于,所述飞行器使每个机翼(33a、33b)的上表面和下表面以及卵形结构体(30)的表面被光伏太阳能电池覆盖。
28.根据权利要求27所述的飞行器,其特征在于,所述飞行器包括独立的光伏电池(pv)组,以用于为主电池充电,所述主电池用于为所述飞行器的电动马达(m)供电,所述独立的光伏电池组借助于由电子板(204)控制的dc-dc转换器(203)来连接到所述主电池,所述电子板(204)经由总线控制器局域网(207)连接到电池管理系统(208)。
29.根据权利要求28所述的飞行器,其特征在于,所述光伏电池(pv)组由独立的dc-dc转换器(203)管理,以使得一个或多个光伏电池的遮蔽或破坏最小化。
30.根据权利要求28所述的飞行器,其特征在于,dc-dc电子转换模块将一组电池的电压乘以一因子,以便等于相对高电压的主电池包的电压,以用于为所述电动马达供电。
31.根据权利要求28所述的飞行器,其特征在于,所述电子dc-dc转换模块被集成在相同的电子板中,所述电子板将主电池的电压转换到处于相对低的电压的辅助电池的值,以用于为机载电路供电。
32.根据权利要求28所述的飞行器,其特征在于,所述dc-dc电子转换模块配备有适合于供应所述主电池的单个部分的转换因子。
33.根据权利要求1所述的飞行器,其特征在于,所述飞行器具有的横向尺寸小于道路交通工具所允许的255cm的限制,使得所述飞行器能够在道路上行进并停放在停车场中。
34.根据权利要求28所述的飞行器,其特征在于,所述光伏太阳能电池(pv)被结合在分层层状结构中,所述分层层状结构包括:最外层(100),其包括一层或多层具有uv或ectfe涂层的pet;两层热塑性聚烯烃材料(101),其处于所述电池上方和下方,以封装所述电池;以及带有uv涂层的pet或者碳纤维的后层(101)。
35.根据权利要求28所述的飞行器,其特征在于,所述光伏太阳能电池构成分层复合结构,所述分层复合结构在所述机翼上或卵形支撑结构上具有容易集成的碳纤维层,从而有助于其结构刚度。
36.根据权利要求1所述的飞行器,其特征在于,每个电动马达(m)具有第一和第二曲轴(60),所述第一和第二曲轴(60)从所述电动马达(m)的相对部分延伸并连接到相应的带传动装置(5)的相应带轮(6),以驱动相应的转子环(2a),所述曲轴(60)中的每一个被直接连接到所述电动马达(m),或者借助于齿轮传动装置(61、62)连接到所述电动马达(m),以用于反转旋转方向。
37.根据权利要求21所述的飞行器,其特征在于,卵形支撑结构(30)以一个或两个基本上锥形的分支朝向转子的中心定向开始和结束,以便由于柯恩达效应而有利于气流与卵形结构接触。
38.根据权利要求21所述的飞行器,其特征在于,所述飞行器包括单个直机翼表面(31),所述直机翼表面(31)具有恒定的弦且具有基本上为零的箭形角,或者具有可变的弦和相对小的箭形角,或者在形状上为具有高箭形角和可变的弦的梯形。
39.一种用于交通工具、特别是用于飞行器或船的环形螺旋桨单元,包括:
40.一种船,包括一个或多个根据权利要求39所述的环形螺旋桨单元(2),其中,每个环形螺旋桨单元(2)被承载在立柱的下端处,所述立柱在所述船的船尾处在舷外支撑,并且构造成保持相应的环形螺旋桨(2)浸没在水中。
41.根据权利要求40所述的船,其特征在于:
42.根据权利要求41所述的船,其特征在于,承载每个环形螺旋桨单元的立柱能够围绕其竖直轴线定向。
43.根据权利要求40所述的船,其特征在于,所述船设置有至少两个前水翼和至少两个后水翼,所述前水翼和所述后水翼能够通过相应的致动器在邻近所述船的船体的非操作位置和相对于所述船体向下隔开的操作位置之间移动,并且由此使得所述交通工具在每个巡航速度下的能量消耗最小化。
技术总结
一种飞行器,特别是个人空中机动飞行器或无人机,包括:一个或多个环形螺旋桨(2),其具有一个或多个叶片(3),该叶片(3)从转子环主体(2A)朝向转子环(2A)的轴线(4)径向延伸;以及一个或多个带传动装置(5),其将每个环形螺旋桨(2)的转子环(2A)与包括电动马达的马达单元(P)的输出轴连接。提供了各种替代技术来旋转地支撑转子环(2A)。设想了各种飞行器构造,包括竖直起飞和水平飞行构造。飞行器表面覆盖有成组的光伏太阳能电池(PV),借助于由电子板(204)控制的DC‑DC转换器(203),这些电池连接到主电池包(201),以用于为驱动环形螺旋桨的电动马达(M)供电,并且连接到辅助电池(202),以用于为机载电路供电。
技术研发人员:P·佩尔罗,D·潘塞里尼
受保护的技术使用者:互动全电动车有限责任公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!