航拍固定翼无人机机体抖动的抑制方法及系统与流程
本发明涉及无人机的控制与调节,尤其涉及一种航拍固定翼无人机机体抖动的抑制方法及系统。
背景技术:
1、无人机航测技术经过不断的发展,在许多领域都发挥着极大的作用,但航测精度受环境(特别是风场的极大变化)的影响较大。
2、目前,无人机在滚转通道控制系统设计时,首先是建立小扰动线性化模型,然后根据滚转方向的空气动力阻尼系数与操纵力矩系数建立机体滚转通道数据模型,最后进行滚转通道控制参数设计。在设计过程中,忽略了交叉阻尼力矩、斜吹力矩等,一般地这些力矩为小量,影响较小,把它们作为干扰条件来保证弹体的稳定性。然而,无人机在飞行过程中,强风干扰或者侧向机动等因素将导致侧滑角较大,较大的侧滑角产生较强的斜吹力矩,如果攻角较大,斜吹力矩会更大,这将导致机体抖动,严重影响机体的稳定性。
技术实现思路
1、本发明目的在于公开一种航拍固定翼无人机机体抖动的抑制方法及系统,以根据吹风数据及飞行状态,评估斜吹力矩对滚转通道的影响,并把该影响等效成滚转舵补偿在滚转舵面上,从而抑制机体抖动。
2、为达上述目的,本发明方法包括:
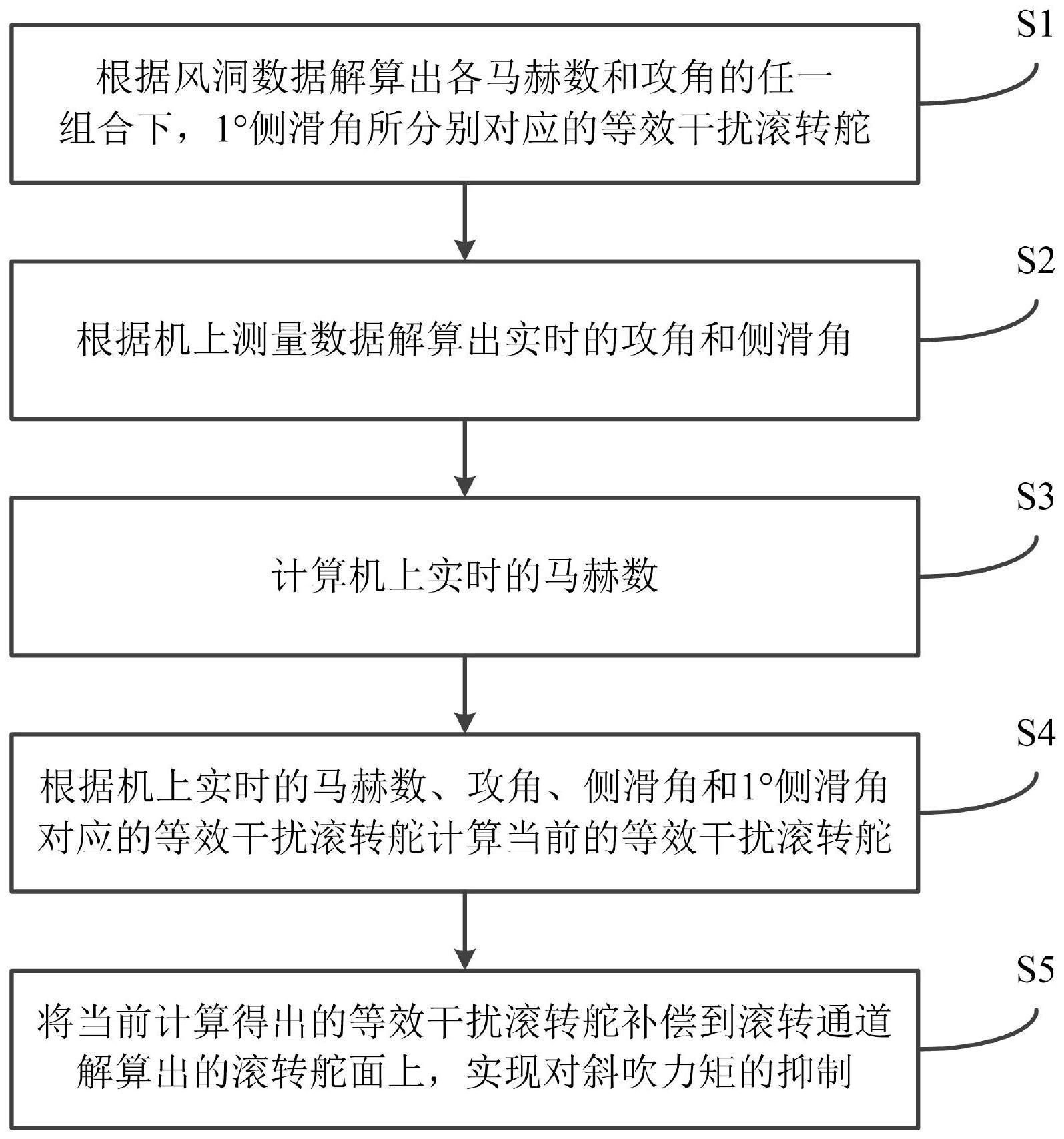
3、根据风洞数据解算出各马赫数和攻角的任一组合下,1°侧滑角所分别对应的等效干扰滚转舵。
4、根据机上测量数据解算出实时的攻角和侧滑角。
5、计算机上实时的马赫数。
6、根据机上实时的马赫数、攻角、侧滑角和1°侧滑角对应的等效干扰滚转舵计算当前的等效干扰滚转舵。
7、将当前计算得出的等效干扰滚转舵补偿到滚转通道解算出的滚转舵面上,实现对斜吹力矩的抑制。
8、为达上述目的,本发明还公开一种航拍固定翼无人机机体抖动的抑制系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
9、藉此,本发明根据吹风数据及飞行状态,评估斜吹力矩对滚转通道的影响,并把该影响等效成滚转舵补偿在滚转舵面上。从而可有效抑制机体的抖动,简单易行并具有很好的工程应用价值,能保证机体的飞行稳定性。
10、下面将参照附图,对本发明作进一步详细的说明。
技术特征:
1.一种航拍固定翼无人机机体抖动的抑制方法,其特征在于,包括:
2.根据权利要求1所述的航拍固定翼无人机机体抖动的抑制方法,其特征在于,1°侧滑角所对应的等效干扰滚转舵的计算公式为:
3.根据权利要求1所述的航拍固定翼无人机机体抖动的抑制方法,其特征在于,实时的攻角和侧滑角的计算公式为:
4.根据权利要求1所述的航拍固定翼无人机机体抖动的抑制方法,其特征在于,机上实时的马赫数的计算公式为:
5.根据权利要求1所述的航拍固定翼无人机机体抖动的抑制方法,其特征在于,根据机上实时的马赫数、攻角、侧滑角和1°侧滑角对应的等效干扰滚转舵计算当前的等效干扰滚转舵的具体计算公式为:
6.一种航拍固定翼无人机机体抖动的抑制系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述权利要求1至5任一所述的方法。
技术总结
本发明涉及无人机技术领域,公开一种航拍固定翼无人机机体抖动的抑制方法及系统,以根据吹风数据及飞行状态,评估斜吹力矩对滚转通道的影响,并把该影响等效成滚转舵补偿在滚转舵面上,从而抑制机体抖动。方法包括:根据风洞数据解算出各马赫数和攻角的任一组合下,1°侧滑角所分别对应的等效干扰滚转舵;根据机上测量数据解算出实时的攻角和侧滑角;计算机上实时的马赫数;根据机上实时的马赫数、攻角、侧滑角和1°侧滑角对应的等效干扰滚转舵计算当前的等效干扰滚转舵;将当前计算得出的等效干扰滚转舵补偿到滚转通道解算出的滚转舵面上,实现对斜吹力矩的抑制。
技术研发人员:凡建超,王鸿睿,鱼小军,张飞飞,高晨阳,杨勇,李格,杨浩瀚,刘胜,段国栋
受保护的技术使用者:湖南云箭科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!