一种水陆空三栖机器人的轮翼协同控制系统
本发明涉及机器人领域,尤其涉及一种水陆空三栖机器人的轮翼协同控制系统。
背景技术:
1、对于室内及狭小空间侦察任务,旋翼机侦查时间有限不能长时间执行侦察任务;地面机器人可长时间侦查但其活动范围仅局限于地面,视野有限;陆空两栖机器人兼具地面机器人长时侦察和旋翼飞行器垂直起降和机动飞行的特性,由于陆空结合机器人具备更强的地形适应性,在障碍物密集环境下的操控性较高;同时传统陆空两栖机器人不能满足水上航行需求,因此可以考虑添加浮力装置以实现水上航行需求。
2、查阅相关已公开技术方案,如cn112498681a现有技术公开了一种水陆空三栖机器人,该方案采用前轮转向、后轮驱动的方式实现机器人在陆地上的全方向运动;采用双舵机控制的方式实现rov水下推进器的升降与转向,并利用rov水下推进器推动螺旋桨高速旋转,实现机器人在水上的全方向运动;采用可伸缩的四旋翼空中飞行模块实现机器人的飞行功能;利用nuc小电脑向水陆模块控制板、飞行控制板和起落架模块发布控制指令,实现机器人的全自主运动;另一种典型的公开号为cn113815857a的现有技术公开了一种水陆空三栖机器人装置,包括六旋翼飞行组件,六旋翼飞行组件的顶部安装有gps定位组件和摄像头,六旋翼飞行组件的底部安装有水陆复合组件,水陆复合组件上安装有视觉定位装置,六旋翼飞行组件和水陆复合组件分别与控制器单元连接,六旋翼飞行组件、gps定位组件、水陆复合组件、视觉定位装置和控制器单元分别与电源组件相连接;该方案通过整合不同模式作业对应的功能模块,使得同一舵机能够对应于完成多项作业,从而简化机器人的结构,同时保证机器人的作业可靠性;上述方案中陆地行驶动力装置、空中行驶动力装置和水中行驶动力装置是分开的,造成了结构与动力的冗余,并且陆地行驶模式功能较为单一,机动性较差,因此需要一种水陆空共用一套动力且机动性较强的机器人。
技术实现思路
1、本发明的目的在于,针对目前所存在的不足,提出了一种水陆空三栖机器人的轮翼协同控制系统。
2、本发明采用如下技术方案:
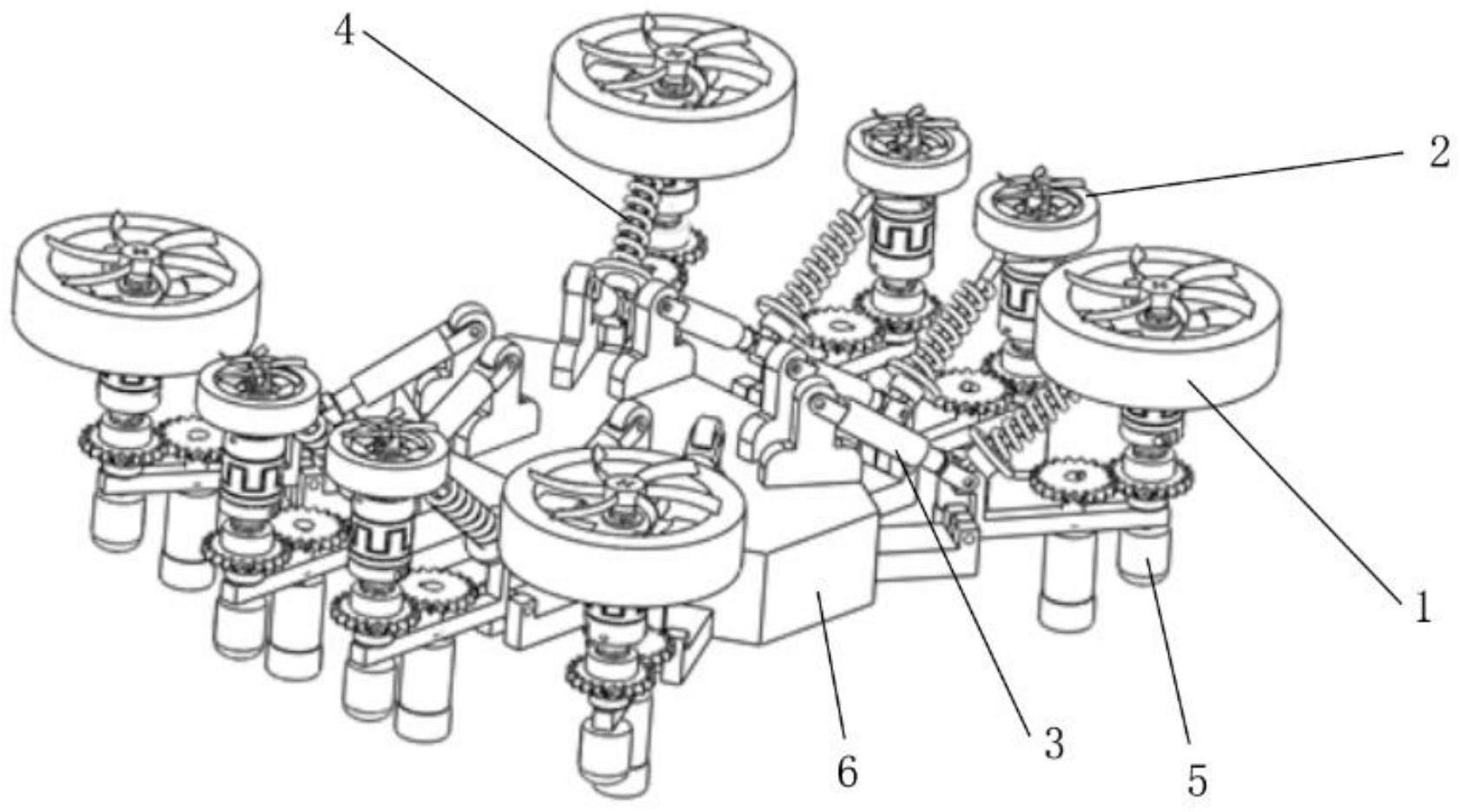
3、一种水陆空三栖机器人的轮翼控制系统,所述系统包括多组大旋翼机构、多组小旋翼机构、与大旋翼机构及小旋翼机构一一对应连接的多组旋翼支撑机构、与多组旋翼支撑机构一一对应连接的多组伸缩杆机构;
4、所述大旋翼机构包括大旋翼和大轮,所述小旋翼机构包括小旋翼和小轮,所述旋翼支撑机构包括电动推杆,所述伸缩杆机构包括伸缩杆;所述系统通过改变电动推杆和伸缩杆的伸缩状态实现机器人的结构模式在全旋翼飞行模式、大上小下模式、大下小上模式之间的切换。
5、进一步的,所述大上小下模式包括大旋翼飞行模式、小旋翼陆行模式和大上小下协同作业模式;大下小上模式包括小旋翼飞行模式、大旋翼陆行模式和大下小上协同作业模式。
6、进一步的,所述旋翼支撑机构还包括电机、主动齿轮、从动齿轮、空心滑键轴、空心键槽轴、固定轴承、螺钉、联轴器、旋翼滑键轴、减震弹簧、旋翼带座轴承和旋翼固定轴承。
7、进一步的,所述旋翼支撑机构的具体传动方式为:电机转动带动主动齿轮转动,主动齿轮通过齿轮传动带动从动齿轮转动,从动齿轮转动带动空心滑键轴转动;空心滑键轴与空心键槽轴为滑键配合,两者在轴向可相对滑动,且在电动推杆行程内一直为滑键配合;从而空心键槽轴被空心滑键轴带着转动,所述空心键槽轴和旋翼滑键轴通过联轴器连接,旋翼滑键轴随空心键槽轴转动而转动,所述旋翼与旋翼滑键轴固定连接,从而旋翼随电机的转动而转动。
8、进一步的,所述电动推杆控制电机单独带动旋翼转动或带动旋翼和轮一起转动;所述电动推杆对轮和旋翼的转动的具体控制方式为:电动推杆向前推动至设定的行程,此时电动推杆处于伸长状态,所述空心键槽轴与电动推杆在轴向上固定,所以空心键槽轴同样向前推动,空心键槽轴推动带动固定轴承、螺钉、联轴器、旋翼滑键轴和旋翼向前移动,此时旋翼滑键轴相对轮向前移动,此时旋翼滑键轴与轮之间的滑键配合失效,此时电机仅带动旋翼旋转;当电动推杆向后收回时,此时电动推杆处于收缩状态,此时旋翼滑键轴与轮之间的滑键配合重新生效,从一电机带动轮和旋翼一起转动。
9、进一步的,所述伸缩杆机构还包括固定基座、侧面固定基座和电机固定杆,所述伸缩杆一端与固定基座固定连接,另一端与电机固定杆连接;所述电机固定杆一端与伸缩杆连接,另一端与侧面固定基座连接。
10、进一步的,所述伸缩杆机构通过改变伸缩杆的伸缩状态从而调整旋翼和轮的朝向;所述伸缩杆机构对轮和旋翼朝向的调整的具体方式为:伸缩杆向外伸长至设定的行程,此时伸缩杆处于伸长状态,使得电机固定杆的一面与侧面固定基座处于面接触固定状态,此时电机固定杆的朝向为竖直方向,轮和旋翼朝向为水平方向;将所述伸缩杆向内收缩至设定的行程,此时伸缩杆处于收缩状态,使得电机固定杆的另一面与侧面固定基座处于面接触固定状态,此时电机固定杆的朝向为水平方向,此时轮和旋翼朝向为竖直方向。
11、进一步的,所述系统通过控制电动推杆和伸缩杆的伸缩状态来改变机器人的结构模式,使得机器人满足不同工作需求,所述结构模式及系统控制方式如下:
12、全旋翼飞行模式:使得所有伸缩杆处于收缩状态,所有电动推杆处于伸长状态;此时所述大旋翼和小旋翼的朝向均为竖直方向,且大旋翼和小旋翼均能转动;
13、大上小下模式:使得与大旋翼机构对应的伸缩杆处于收缩状态,与小旋翼机构对应的伸缩杆处于伸长状态,此时所述大旋翼的朝向为竖直方向,小旋翼的朝向为水平方向;当机器人切换至大旋翼飞行模式时,大旋翼对应的电动推杆处于伸长状态,此时只有大旋翼能转动;当机器人切换至小旋翼陆行模式时,小旋翼对应的电动推杆处于收缩状态,此时只有小旋翼和小轮能转动;当机器人切换至大上小下协同作业模式时,小旋翼对应的电动推杆处于收缩状态,此时大旋翼、小轮和小旋翼均能转动;
14、大下小上模式:使得与大旋翼对应的伸缩杆处于伸长状态,与小旋翼对应的伸缩杆处于收缩状态,此时所述大旋翼的朝向为水平方向,小旋翼的朝向为竖直方向;当机器人切换至小旋翼飞行模式时,小旋翼对应的电动推杆处于伸长状态,此时只有小旋翼转动;当机器人切换至大旋翼陆行模式时,大旋翼对应的电动推杆处于收缩状态,此时只有大旋翼和大轮能转动;当机器人切换至大下小上协同作业模式时,大旋翼对应的电动推杆处于收缩状态,此时大旋翼、小旋翼、大轮均能转动;
15、所述全旋翼飞行模式、大上小下模式、大下小上模式与浮力装置结合则实现水面航行模式;
16、进一步的,所述系统还包括与多组旋翼支撑机构一一对应连接的多组减震机构,所述减震机构主体包括上端悬架杆、减震弹簧和下端悬架杆,所述减震弹簧初始状态为压缩状态,当机器人整体受到冲击时,弹簧通过进一步压缩减小机器人整体震动。
17、本发明所取得的有益效果是:
18、1.通过将大旋翼、小旋翼、旋翼支撑机构及伸缩杆机构相结合,实现机器人的多种工作模式的灵活转换,有效提高了机器人的灵活性;
19、2.使用单个电机作为对应大/小轮和大/小旋翼的动力源,减少了结构与动力的冗余;
20、3.通过调整伸缩杆的伸缩状态可以完成大/小轮和大/小旋翼在水平或竖直方向上的切换,结构控制简单;
21、4.通过调整电动推杆的伸缩状态控制大/小轮和大/小旋翼的转动,在机器人处于飞行模式时仅使大/小旋翼的转动,控制大/小轮不转动,从而可以减少转动惯量带来的能量损失。
- 还没有人留言评论。精彩留言会获得点赞!