用于相机监测的八轴无人机
本发明涉及无人机,尤其涉及用于相机监测点八轴无人机。
背景技术:
1、多旋翼无人机以其灵活、快速、稳定和机械结构简单的特点占据了很大的行业应用市场。随着无人机应用领域的不断扩大和对无人机性能的要求不断提高,多旋翼技术的发展和优化,为八轴无人机的设计和制造提供了市场和技术的基础。八轴无人机采用了更多的电机和桨叶,更多的独立控制的旋翼提供更强的升力和更好的飞行稳定性,相比于四轴多旋翼无人机更加能够保证飞行的平稳,此外目前多数无人机中负载能力有限,为了提高负载能力,随着八轴无人机对飞行时间和负载能力的要求不断提高,需要使用更高性能的电源和动力系统。
2、然而,现有的八轴无人机通常通过同一平面分布的正八边形角上的电机和桨叶来产生升力,旋翼通过电机带动螺旋桨旋转提供升力,此无人机螺旋桨大小受限于设计本身,载重能力不足,且重心在螺旋桨下方,在前飞状态下,诱导的来流会产生平行于桨盘平面的阻力,阻力形成的力矩会促使多旋翼无人机俯仰角减小,表现为控制迟钝,由于其无法将推力中心与重心重合,而导致其载重能力受限。
技术实现思路
1、本发明的目的在于提供一种用于相机监测的八轴无人机,以解决上述背景技术中提到的无人机载重能力不足的问题。
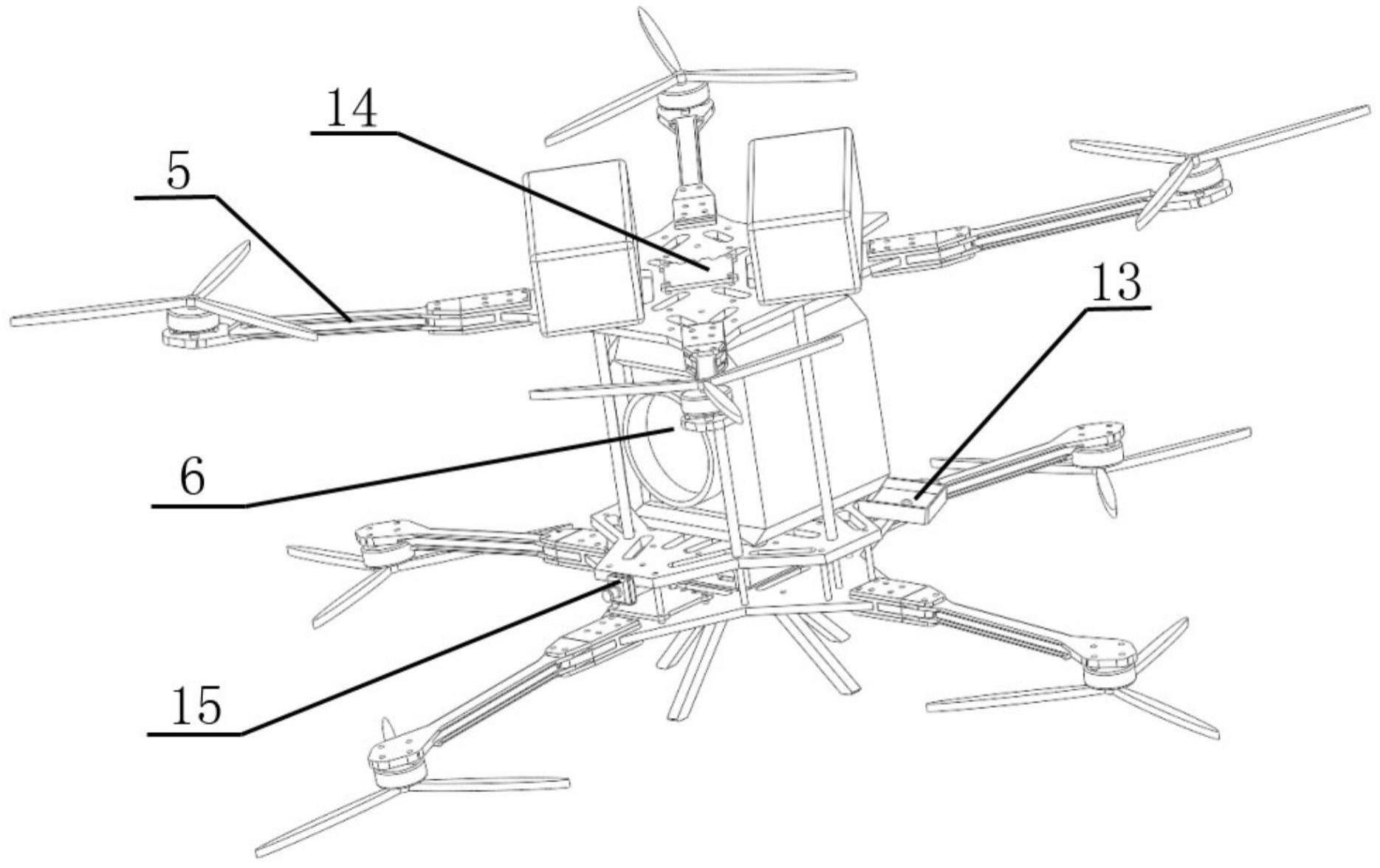
2、为实现上述目的,本发明提供如下技术方案:一种用于相机监测的八轴无人机,包括:机载设备;载物架,所述载物架用于承载机载设备;支架,所述支架可拆卸连接于所述载物架的下方;多个机臂,多个所述机臂分别可拆卸连接于所述载物架的顶部和底部,且向背离所述载物架方向放射状分布,所述载物架顶部的机臂与水平面之间具有朝上的倾斜夹角,所述载物架底部的机臂与水平面之间具有朝下的倾斜夹角;多个动力装置,所述动力装置可拆卸连接于所述机臂背离所述载物架的一端,所述动力装置的朝向与所述机臂与水平面之间的倾斜夹角朝向一致。
3、优选的,所述载物架包括:顶板,所述顶板为矩形板,所述顶板的四个角固定连接有凸块,四个所述凸块分别与四个所述机臂可拆卸连接;底板,所述底板为中间宽四端窄的十字型板,所述底板的四端分别与四个所述机臂可拆卸连接,所述顶板的四个角与所述底板的四端相互错开;连接组件,所述连接组件一端与所述顶板可拆卸连接,另一端与所述底板可拆卸连接。
4、优选的,所述动力装置包括:八个电机,所述电机可拆卸连接于所述机臂背离载物架方向的一端;八个螺旋桨,所述螺旋桨与所述电机的驱动轴可拆卸连接。
5、优选的,所述载物架还包括:隔板,所述隔板通过所述连接组件与所述顶板和底板可拆卸连接,所述隔板与所述底板形状相同,所述隔板的四端短于所述底板的四端且至少为所述顶板的中心点到边缘之间的距离。
6、优选的,相邻两个所述机臂之间的水平夹角为22.5°,所述机臂沿朝向方向与水平面之间的倾斜角度为0°-15°。
7、优选的,所述连接组件包括:多个第一支撑杆,所述第一支撑杆一端与所述顶板可拆卸连接,另一端与所述隔板可拆卸连接,所述第一支撑杆对称分布于所述顶板与所述隔板的边缘位置;多个第二支撑杆,所述第二支撑杆一端与所述隔板背离所述顶板的一面可拆卸连接,另一端与所述底板可拆卸连接,所述第二支撑杆对称分布于所述隔板与所述底板的四端。
8、优选的,所述隔板其中一端的两侧分别与两个连接板固定连接,所述顶板与所述连接板对应的一侧固定连接有定位板,所述连接板与所述定位板错位布置,所述顶板、所述底板和所述隔板均对称分布有通孔。
9、优选的,当所述螺旋桨旋转时,有且仅有一个相邻的所述螺旋桨与其组合成为一个方向控制单元,两个相邻的所述螺旋桨旋转速相等,旋转方向相反且叶片偏转方向相反。
10、优选的,当所述螺旋桨旋转时,有且仅有一个在同一平面相邻的所述螺旋桨与其组合成为一个方向控制单元,两个相邻的所述螺旋桨旋转速相等,旋转方向相反且叶片偏转方向相反。
11、优选的,所述机载设备包括:供电单元,所述供电单元用于设备供电,所述供电单元可拆卸连接于所述顶板的顶部,并沿所述顶板的中心位置对称分布,所述供电单元为电源;采集单元,所述采集单元用于图像采集,所述采集单元可拆卸连接于所述隔板的顶部,所述采集单元为相机,所述相机可拆卸连接于所述隔板的顶部中心位置;摄像头,用于采集更广角度的图像,所述摄像头可拆卸连接于所述隔板背离所述连接板的一端;控制单元,所述控制单元用于控制无人机的飞行姿态,所述控制单元可拆卸连接于所述顶板与所述底板的顶部,并沿所述载物架的垂直中心线对称分布,所述控制单元为飞行控制器,电调,所述电调为两个,其中一个所述电调可拆卸连接于所述顶板顶部的中心位置,另一个所述电调可拆卸连接于所述隔板未连接所述接收机和所述无线图传一端的顶部;通信单元,所述通信单元用于与控制终端之间的信号传输,所述通信单元沿所述载物架的垂直中心线对称分布,所述通信单元为接收机,所述接收机可拆卸连接于所述隔板一端的顶部;无线图传,所述无线图传可拆卸连接于所述隔板背离所述接收机一端的顶部;gps,所述gps可拆卸连接于所述连接板的内部。
12、与现有技术相比,本发明的有益效果是:
13、本发明中,所述载物架上下层分布,所述载物架用于承载机载设备;多个动力装置,所述动力装置沿所述载物架垂直方向上下层分布,上层的所述动力装置方向朝上,下层的所述动力装置方向朝下;多个机臂,所述机臂与所述载物架可拆卸连接且向背离载物架方向放射状分布,所述机臂沿朝向方向与水平面之间具有倾斜夹角,在使用过程中,动力装置的螺旋桨可以更大的设置,且使得无人机所述载物架的重心、负载重心、推力重心尽可能重合于无人机中心位置,并且所述机臂上下两层背向设置,可以为图像采集提供更大的视角,大大的增加了无人机的负载能力。
技术特征:
1.一种用于相机监测的八轴无人机,其特征在于,包括:
2.根据权利要求1所述的用于相机监测的八轴无人机,其特征在于,所述载物架包括:
3.根据权利要求2所述的用于相机监测的八轴无人机,其特征在于,所述动力装置包括:
4.根据权利要求2所述的用于相机监测的八轴无人机,其特征在于,所述载物架还包括:
5.根据权利要求3所述的用于相机监测的八轴无人机,其特征在于,相邻两个所述机臂(5)之间的水平夹角为22.5°,所述机臂(5)沿朝向方向与水平面之间的倾斜角度为0°-15°。
6.根据权利要求4所述的用于相机监测的八轴无人机,其特征在于,所述连接组件包括:
7.根据权利要求4所述的用于相机监测的八轴无人机,其特征在于,所述隔板(3)其中一端的两侧分别与两个连接板(13)固定连接,所述顶板(1)与所述连接板(13)对应的一侧固定连接有定位板,所述连接板(13)与所述定位板错位布置,所述顶板(1)、所述底板(2)和所述隔板(3)均对称分布有通孔。
8.根据权利要求5所述的用于相机监测的八轴无人机,其特征在于,当所述螺旋桨旋转时,有且仅有一个相邻的所述螺旋桨与其组合成为一个方向控制单元,两个相邻的所述螺旋桨旋转速相等,旋转方向相反且叶片偏转方向相反。
9.根据权利要求5所述的用于相机监测的八轴无人机,其特征在于,当所述螺旋桨旋转时,有且仅有一个在同一平面相邻的所述螺旋桨与其组合成为一个方向控制单元,两个相邻的所述螺旋桨旋转速相等,旋转方向相反且叶片偏转方向相反。
10.根据权利要求1-9中任意一项所述的用于相机监测的八轴无人机,其特征在于,所述机载设备包括:
技术总结
本发明公开了用于相机监测的八轴无人机,包括机载设备;载物架,载物架用于承载机载设备;多个动力装置,动力装置以所述载物架为中心上下层分布,上层的动力装置方向朝上,下层的动力装置方向朝下;多个机臂,机臂与载物架可拆卸连接且向背离载物架方向放射状分布,机臂沿朝向方向与水平面之间具有倾斜夹角,在使用过程中,动力装置的螺旋桨可以更大的设置,且使得无人机载物架的重心、负载重心、推力重心尽可能重合于无人机中心位置,并且机臂上下两层背向设置,可以为图像采集提供更大的视角,大大的增加了无人机的负载能力。
技术研发人员:沈小乐,周子杰,王宇翔,岑锴,曹劲舟
受保护的技术使用者:深圳技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!