一种仿生扑翼机的下肢弹跳抓取结构设计
本申请涉及仿生机械人领域,具体涉及到仿生机械鸟能够实现弹跳抓取功能的下肢装置。
背景技术:
1、仿生机械鸟是利用空气动力学的原理,实现在空中自主飞行的一种仿生机器人。与现有的旋翼无人机相比,其隐蔽性强、噪音低,多应用于军事领域的侦察任务中。针对仿生鸟飞行时长的问题,西北工业大学与北京航空航天大学研制的扑翼机实现了远超一小时的超长滞空飞行,而对于其起飞及着陆功能的实现,相对于实际鸟类来说,其仿真性能并不理想。在国外,对于仿生鸟起飞及降落的研究已有雏形,斯坦福大学研制了一款基于旋翼无人机的仿生鸟下肢起落装置,为起飞及着陆动作姿态的研究提供了仿生鸟下肢结构参考模型。而苏黎世联邦理工学院研制的仿生鸟下肢抓取结构则是将所设计的下肢结构与仿生鸟机体进行了结合,使得鸟体结构在生物学上更趋于完整,但是该结构只能实现降落抓取,不能实现原地弹跳起飞。因此我们发明了一款可实现弹跳起飞兼能脚部抓取功能的仿生鸟下肢结构。
技术实现思路
1、基于上述背景技术,本申请对于仿生鸟的弹跳起飞及降落抓取功能进行了鸟类下肢结构的仿生设计,在现有功能欠缺的基础上对其进行补足,使得仿生鸟结构的功能实现更加全面。下肢起降的实现在一定程度上解决了因为要长时间捕捉战场上敌人持续动向的隐蔽性不足问题,也解决了由于电池容量不足而导致的续航能力不足问题。
技术特征:
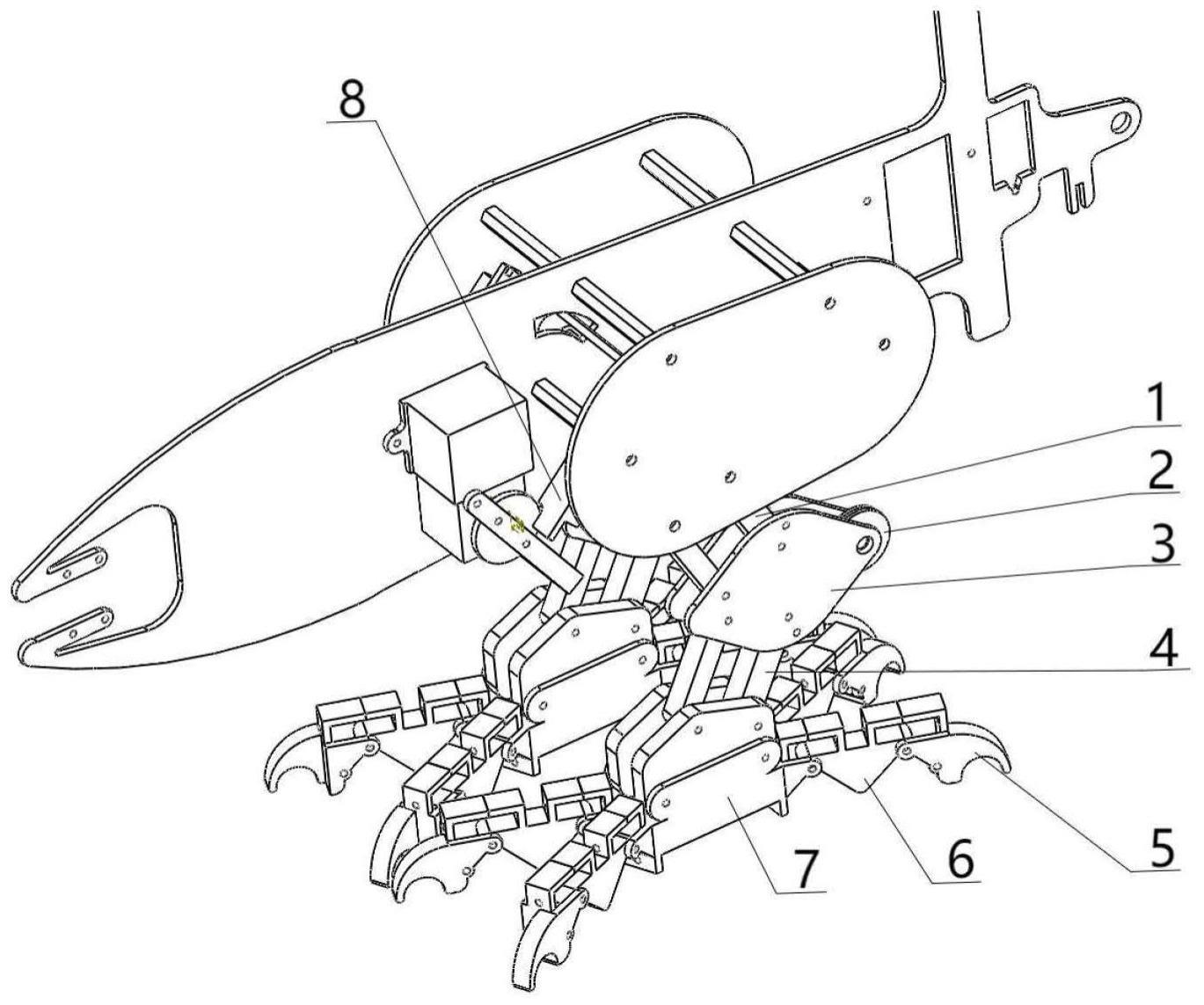
1.一种仿生鸟下肢弹跳抓取机构,包括两侧对称分布的下肢传动结构,即腿部胫跗骨(1)、滚线滑轮(2)、齿轮杆啮合关节定位夹板(3)、腿部跗跖骨(4)、鸟脚爪(5)、鸟脚趾(6)、鸟脚掌(7)、下肢卡死装置(8)。
2.根据权利要求1所述的一种仿生鸟下肢弹跳抓取机构,其特征在于:腿部胫跗骨(1)、腿部跗跖骨(4)、鸟脚爪(5)、鸟脚趾(6)、鸟脚掌(7)、下肢卡死装置(8)。
3.根据权利要求1所述的一种仿生鸟下肢弹跳抓取机构,其特征在于:两组腿部胫跗骨(1)与腿部跗跖骨(4)的传动形式,两者为扇形齿轮杆,并进行传动比为1:1的啮合传动。
4.根据权利要求1所述的一种仿生鸟下肢弹跳抓取机构,其特征在于:鸟脚爪(5)、鸟脚趾(6)、鸟脚掌(7)的分布、结构及其驱动形式。
5.根据权利要求1所述的一种仿生鸟下肢弹跳抓取机构,其特征在于:下肢卡死装置(8)以绳索与橡皮筋复合控制的驱动形式对卡死机构进行的操控。
6.根据权利要求1所述的一种仿生鸟下肢弹跳抓取机构,其特征在于:经滚线滑轮(2)绕线控制脚爪进行被动抓取的传动形式。
技术总结
本发明公开了一种仿生鸟下肢传动机构模型,属于仿生机器人领域,目的在于实现仿生机械鸟的弹跳起飞及抓取功能。其机构包含腿部胫跗骨(1)、滚线滑轮(2)、齿轮杆啮合关节定位夹板(3)、腿部跗跖骨(4)、鸟脚爪(5)、鸟脚趾(6)、鸟脚掌(7)、下肢卡死装置(8),执行机构以舵机绳索组合的形式驱动两侧腿部结构进行同步运动,屈腿时进行脚部抓取动作,杆系弹簧拉伸储存弹性势能。伸腿时脚部张开,释放储存的弹性势能,仿生鸟翅膀扑动,进而完成机体的弹跳起飞动作。本发明的下肢装置结构新颖,仿生性能优秀,完善了仿生鸟起降飞行的功能,具有广阔的军事侦察应用前景。
技术研发人员:张淳彭,邵伟平,郝永平
受保护的技术使用者:沈阳理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!