一种三足空间机器人组装地面模拟实验系统
本发明涉及机器人,具体涉及一种三足空间机器人组装地面模拟实验系统。
背景技术:
1、伴随航天任务的复杂化,空间结构趋于大型化、模块化,诸如大型空间望远镜,空间太阳能电站等。然而大型空间结构受尺寸与运载能力的限制,无法用运载工具从地球上制造成品发射,只能使用模块化发射-在轨组装的构建方式。而且,大型空间结构面临的在轨维护任务以及运行监测等任务需求也日趋复杂和多样。随着机器人技术的发展,空间机器人逐渐成为在轨组装和服务的一种可行方式,得到了诸多学者的广泛关注。
2、目前对于组装空间结构的实验系统较少,对于相关技术缺乏验证实验途径,因此需要提供了一种对于组装空间结构的地面模拟实验系统技术,能够为设计相关实验验证平台提供指导。
技术实现思路
1、本发明要解决的技术问题是提供一种三足空间机器人组装地面模拟实验系统,能够为设计相关实验验证平台提供指导,同时成本低廉。
2、为解决上述问题,本发明采用如下技术方案:
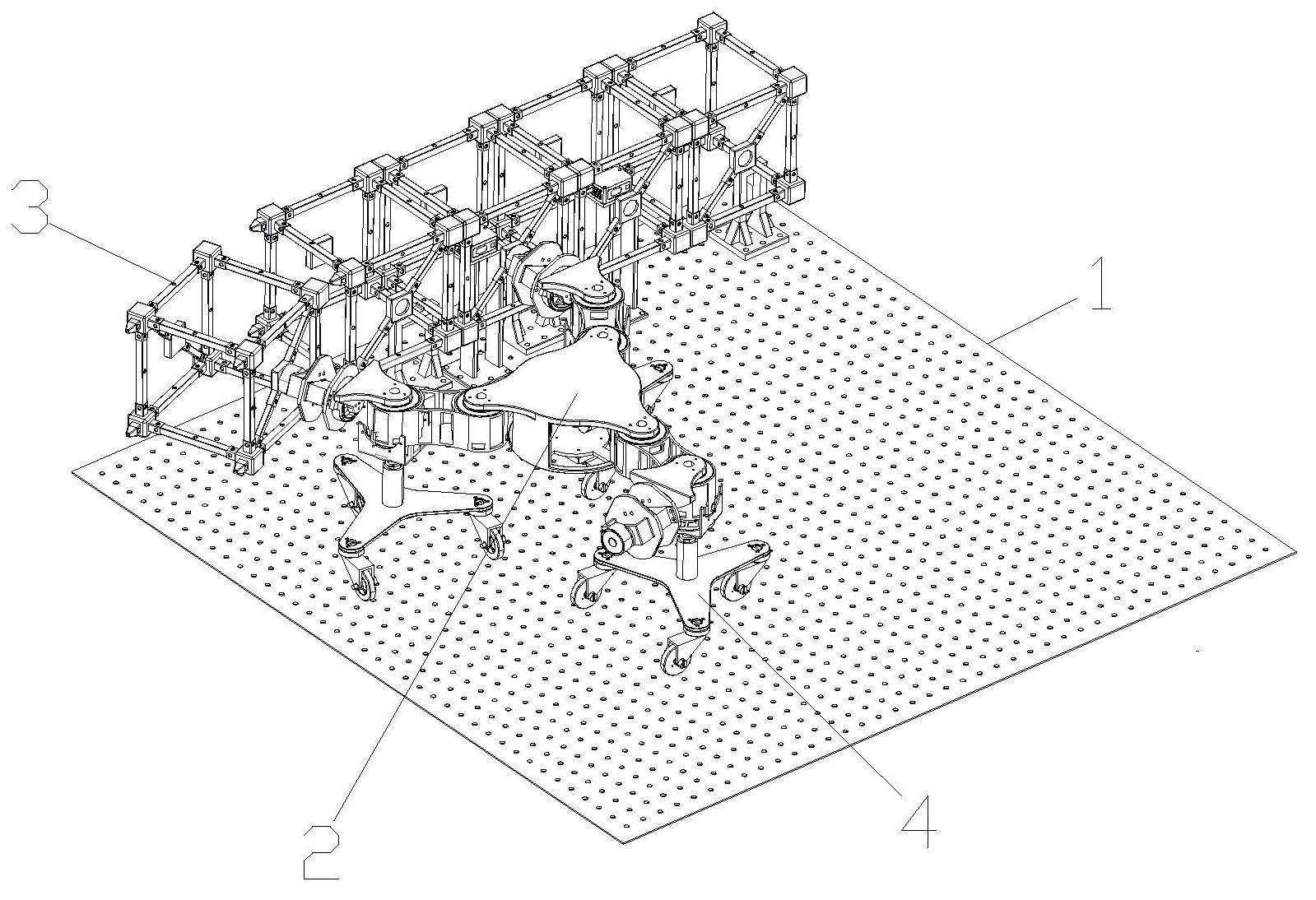
3、一种三足空间机器人组装地面模拟实验系统,包括:滑行平面、三足机器人和多个组装模块;
4、所述三足机器人上设置有滑行装置,用于在所述滑行平面上滑行,为所述三足机器人提供支持力抵消重力;
5、所述三足机器人包含有躯干和三个分支机构;
6、三个所述分支机构以旋转对称分布的方式布置在所述躯干上;
7、所述躯干上设置有控制总成;
8、所述分支机构包含有臂体、第一电动关节、第二电动关节和抓取机构,所述第一电动关节、第二电动关节和抓取机构均与控制总成电连接;
9、所述第一电动关节和第二电动关节分别位于所述臂体的两端,所述第一电动关节和第二电动关节均与所述臂体固定连接;
10、所述第一电动关节与所述抓取机构连接,所述第一电动关节用于带动所述抓取机构转动;
11、所述第二电动关节与所述躯干连接,所述第二电动关节用于带动所述臂体转动;
12、所述抓取机构的转动轴线与所述臂体的转动轴线平行;
13、所述组装模块上设置有插入部和插入槽,所述插入部和插入槽用于供相邻的所述组装模块拼接。
14、在其中一个实施例中,还包括:支撑架;
15、所述支撑架用于支撑所述组装模块,以使所述组装模块悬在所述滑行平面上方。
16、在其中一个实施例中,还包括:探测装置和终端;
17、所述探测装置与所述终端电连接,所述探测装置用于测量任务中的所述组装模块发生的耦合振动。
18、在其中一个实施例中,所述滑行装置具有三个,三个所述滑行装置分别固定在三个所述分支机构上。
19、在其中一个实施例中,所述滑行装置包括脚架和万向轮;
20、所述万向轮与所述脚架固定连接,所述脚架位于所述第一电动关节的下方,所述脚架与所述臂体固定连接。
21、在其中一个实施例中,所述组装模块包含有多个第一立方关节、多个第二关节立方和多个主连接杆;
22、所述主连接杆与所述第一立方关节和第二关节立方固定连接,并构成立方框架体;
23、所述插入部位于所述第一关节立方侧面,所述插入槽位于所述第二关节立方侧面。
24、在其中一个实施例中,所述立方框架体上设置有第一副连接杆和第二副连接杆;
25、所述第一副连接杆和第二副连接杆分别位于所述立方框架体的两个相对面处。
26、在其中一个实施例中,所述第一副连接杆和第二副连接杆呈x状分布。
27、在其中一个实施例中,所述第一副连接杆和第二副连接杆中部均设置有抓取点,供所述抓取机构抓取。
28、在其中一个实施例中,所述插入部远离所述组装模块的一端设置有第一磁铁体,所述插入槽内设置有第二磁铁体;
29、相邻的所述组装模块连接时,所述第一磁铁体和第二磁铁体相互吸引。
30、本公开的有益效果为:提供了一种对于组装空间结构的地面模拟实验系统,能够为设计相关实验验证平台提供指导。同时使用了滑行装置进行重力平衡,可以提供三足机器人在平面上平移和旋转共三个自由度的支撑。滑行装置在平台上滑行,给三足机器人提供支持力抵消重力,模拟时间不受限,同时成本低廉。
技术特征:
1.一种三足空间机器人组装地面模拟实验系统,其特征在于,包括:滑行平面、三足机器人和多个组装模块;
2.根据权利要求1所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,还包括:支撑架;
3.根据权利要求2所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,还包括:探测装置和终端;
4.根据权利要求1所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,所述滑行装置具有三个,三个所述滑行装置分别固定在三个所述分支机构上。
5.根据权利要求4所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,所述滑行装置包括脚架和万向轮;
6.根据权利要求1所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,所述组装模块包含有多个第一立方关节、多个第二关节立方和多个主连接杆;
7.根据权利要求6所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,所述立方框架体上设置有第一副连接杆和第二副连接杆;
8.根据权利要求7所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,所述第一副连接杆和第二副连接杆呈x状分布。
9.根据权利要求8所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,所述第一副连接杆和第二副连接杆中部均设置有抓取点,供所述抓取机构抓取。
10.根据权利要求1所述的一种三足空间机器人组装地面模拟实验系统,其特征在于,所述插入部远离所述组装模块的一端设置有第一磁铁体,所述插入槽内设置有第二磁铁体;
技术总结
本发明涉及机器人技术领域,具体提供一种三足空间机器人组装地面模拟实验系统,其包括滑行平面、三足机器人和多个组装模块;三足机器人上设置有滑行装置;三足机器人包含有躯干和三个分支机构;分支机构包含有臂体、第一电动关节、第二电动关节和抓取机构;第一电动关节和第二电动关节分别位于臂体的两端,第一电动关节和第二电动关节均与臂体固定连接;第一电动关节与抓取机构连接;第二电动关节与躯干连接;抓取机构的转动轴线与臂体的转动轴线平行;组装模块上设置有插入部和插入槽,插入部和插入槽用于供相邻的组装模块拼接;该三足空间机器人组装地面模拟实验系统能够为设计相关实验验证平台提供指导,同时成本低廉。
技术研发人员:邬树楠,万文琦,朱有亮,蒙世昌,杨胜丽,叶哲
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!