一种卫星中间惯量轴磁控对日捕获方法及系统
本发明涉及卫星设计,具体为一种卫星中间惯量轴磁控对日捕获方法及系统。
背景技术:
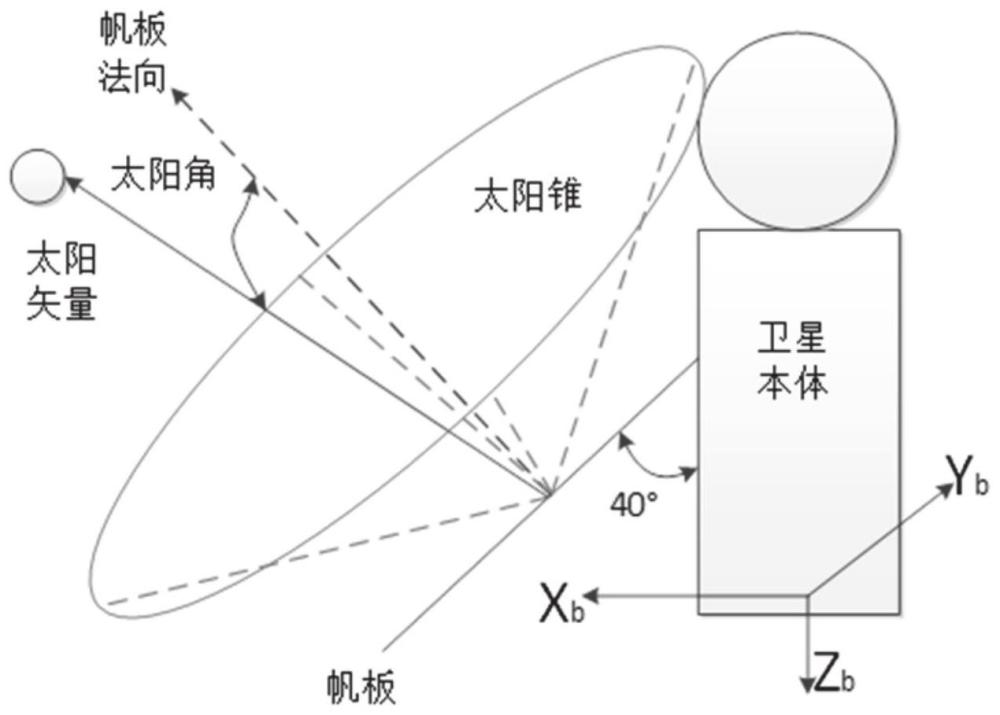
1、采取纯磁控方式实现卫星对日方式较多,有自旋和非自旋对日方式,获取太阳矢量的方法有陀螺积分或者全向模拟太敏方式等。通常卫星的帆板法向和卫星的最大惯量轴或者最小惯量轴平行,因此,上述这些方法磁控对日只能实现对最大惯量轴或者最小惯量轴对日。如果帆板斜装,导致卫星帆板法向和中间惯量轴较为接近时,上述已有太阳方法就很难适用。
2、例如,一种磁控非自旋对日定向方法,通过对磁力矩器磁矩在以磁场强度为法向量的平面上进行控制,实现卫星主惯量单轴对日定向调节。专利“一种考虑太阳角变化率和控制因子的磁控太阳捕获方法”考虑太阳角变化率和控制因子权重可变的磁控太阳捕获方法,这类方法是传统大卫星的磁控对日方法,依赖飞轮启旋形成偏置动量使得某个主惯量轴的内置角动量最大,具备了陀螺定轴性特点后,再依据太阳角变化速率大小条件磁控输出磁矩上行幅值实现对日稳定控制。专利“一种纯磁控自旋对日定向方法”中的方法和本
技术实现要素:
较为接近,采用地磁矢量和太阳矢量确定星体角速度矢量,据星体角速度矢量判断是否需要阻尼力矩;根据太阳矢量与星体太阳帆板法向矢量确定太阳角ε,计算太阳角控制力矩;根据自旋角速度和目标角速度差计算输出自旋控制力矩。
3、但是,上述方法均难以实现中间惯量轴(卫星本体yb轴)快速太阳捕获,因此,需要设计一种中间惯量轴磁控对日捕获方法,在卫星能源安全模式下,确保阳照区帆板能够高效实现中间惯量轴的太阳捕获。
技术实现思路
1、针对现有技术中存在的问题,本发明提供一种卫星中间惯量轴磁控对日捕获方法及系统,针对斜装帆板卫星,在能源故障情况较强约束苛刻条件下,确保阳照区帆板能够高效实现中间惯量轴的太阳捕获。
2、本发明是通过以下技术方案来实现:
3、一种卫星中间惯量轴磁控对日捕获方法,该卫星的太阳能帆板倾斜安装在卫星上,包括以下步骤:
4、步骤1、当卫星帆板对日输出功率小于预定功率,卫星进入安全模式;
5、步骤2、获取连续时间段卫星安全模式的太阳角,根据太阳角确定卫星的中间惯量轴的对日状态,根据对日状态并结合卫星的控制指令使卫星进入太阳捕获模式或自旋模式,在自旋模式下太阳能帆板获取最大的太阳能;
6、步骤3、当卫星进入太阳捕获模式;
7、获取卫星的主平面太阳角,根据主平面太阳角确定卫星的中间惯量轴的对日状态;
8、当中间惯量轴位于对日范围,获取卫星的陀螺角速度和太阳角,根据陀螺角速度和太阳角确定卫星的是否进入自旋模式或保持在太阳捕获模式。
9、优选的,步骤2中卫星在自旋模式下,获取的陀螺角速度,当陀螺角速度的任一轴角速度的绝对值大于或等于设定的角速度变化率w1,卫星根据控制指令进入自主控制的阻尼模式,反之卫星保持自主控制的自旋模式。
10、优选的,步骤2中,当太阳角≤设定值β1,卫星进入自旋模式;当太阳角≥设定值α1,卫星进入自主控制的太阳捕获模式。
11、优选的,步骤3中当主平面太阳角≥设置值α2,卫星的中间惯量轴位于对日范围,否则卫星的中间惯量轴脱离对日范围。
12、优选的,步骤3中当陀螺仪的abs(y轴角速度)≤设置值w2,abs(z轴角速度)≤w2,且太阳角≤α3,卫星切换至自主控制的自旋模式;
13、当abs(y轴角速度)≤w3,abs(z轴角速度)≤w3,且安全模式太阳角>α3,卫星保持自主控制的太阳捕获模式;
14、当abs(y轴角速度)≥w4或者abs(z轴角速度)≥w4,则卫星切换到自主控制的阻尼模式。
15、优选的,步骤3中当太阳角≤α4,则卫星切换至自主控制模式,否则,卫星切换至磁无控模式。
16、优选的,所述卫星进入阻尼模式;
17、当太阳角≤设定值α6,陀螺角速度的abs(y轴角速度)≤w3,且abs(z轴角速度)≤w3,卫星切换至自主控制的自旋模式,否则,卫星保持在阻尼模式;
18、当太阳角>设定值α6,陀螺角速度的abs(y轴角速度)≤w3,且abs(z轴角速度)≤w3,卫星切换到自主控制的太阳捕获模式,否则,卫星保持在阻尼模式。
19、一种卫星中间惯量轴磁控对日捕获系统,该卫星的太阳能帆板倾斜安装在卫星上,包括,
20、安全模块,用于当卫星帆板对日输出功率小于预定功率,卫星进入安全模式;
21、模式切换模块,用于获取连续时间段卫星安全模式的太阳角,根据太阳角确定卫星的中间惯量轴的对日状态,根据对日状态确定卫星进入太阳捕获模式或自旋模式,在自旋模式下太阳能帆板获取最大的太阳能;
22、捕获模块,用于当卫星进入太阳捕获模式;
23、获取卫星的主平面太阳角,根据主平面太阳角确定卫星的中间惯量轴的对日状态;
24、当中间惯量轴位于对日范围,获取卫星的陀螺角速度和太阳角,根据陀螺角速度和太阳角确定卫星的是否进入自旋模式或保持在太阳捕获模式。
25、与现有技术相比,本发明具有以下有益的技术效果:
26、本发明提供的一种卫星中间惯量轴磁控对日捕获方法,针对帆板斜装的卫星能源故障情况较强约束苛刻条件下,采取最小控制配置和能源,根据卫星的太阳角和陀螺角速度控制卫星的姿态,控制斜装帆板卫星的中间惯量轴,即卫星本体xb轴进行全向对日快速捕获,实现太阳电池阵能源获取,确保阳照区帆板能够高效实现中间惯量轴的太阳捕获,实现卫星能源的快速补充。
技术特征:
1.一种卫星中间惯量轴磁控对日捕获方法,该卫星的太阳能帆板倾斜安装在卫星上,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种卫星中间惯量轴磁控对日捕获方法,其特征在于,步骤2中卫星在自旋模式下,获取的陀螺角速度,当陀螺角速度的任一轴角速度的绝对值大于或等于设定的角速度变化率w1,卫星根据控制指令进入自主控制的阻尼模式,反之卫星保持自主控制的自旋模式。
3.根据权利要求1所述的一种卫星中间惯量轴磁控对日捕获方法,其特征在于,步骤2中,当太阳角≤设定值β1,卫星进入自旋模式;当太阳角≥设定值α1,卫星进入自主控制的太阳捕获模式。
4.根据权利要求1所述的一种卫星中间惯量轴磁控对日捕获方法,其特征在于,步骤3中当主平面太阳角≥设置值α2,卫星的中间惯量轴位于对日范围,否则卫星的中间惯量轴脱离对日范围。
5.根据权利要求1所述的一种卫星中间惯量轴磁控对日捕获方法,其特征在于,步骤3中当陀螺仪的abs(y轴角速度)≤设置值w2,abs(z轴角速度)≤w2,且太阳角≤α3,卫星切换至自主控制的自旋模式;
6.根据权利要求1所述的一种卫星中间惯量轴磁控对日捕获方法,其特征在于,步骤3中当太阳角≤α4,则卫星切换至自主控制模式,否则,卫星切换至磁无控模式。
7.根据权利要求2或5所述的一种卫星中间惯量轴磁控对日捕获方法,其特征在于,所述卫星进入阻尼模式;
8.一种卫星中间惯量轴磁控对日捕获系统,该卫星的太阳能帆板倾斜安装在卫星上,其特征在于,包括,
技术总结
本发明公开了一种卫星中间惯量轴磁控对日捕获方法及系统,当卫星进入安全模式获取连续时间段卫星安全模式的太阳角,根据太阳角确定卫星的中间惯量轴的对日状态,根据对日状态确定卫星进入太阳捕获模式或自旋模式,当卫星进入太阳捕获模式;根据主平面太阳角确定卫星的中间惯量轴的对日状态;当中间惯量轴位于对日范围,获取卫星的陀螺角速度和太阳角,根据陀螺角速度和太阳角确定卫星的是否进入自旋模式或保持在太阳捕获模式;该方法使卫星采取最小控制配置和能源,根据卫星的太阳角和陀螺角速度控制卫星的姿态,确保阳照区帆板能够高效实现中间惯量轴的太阳捕获,实现卫星能源的快速补充。
技术研发人员:容建刚,代洪华,张龙,王猛,汪雪川,张耀军
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!