一种电力线路无人机锁线飞行系统的制作方法
本发明涉及电力线路检测,尤其涉及一种电力线路无人机锁线飞行系统。
背景技术:
1、电力线路的检测通常借助锁线飞行的无人机,也就是说使用具有锁线飞行的无人机对电力线路进行远距离检测,无线常见的锁线飞行方式是利用电磁感应原理来确保无人机沿着电力线路飞行,但是在飞行的过程中,电力线路在风力的作用下会出现倾斜的问题,或者无人机本体在沿着电力线路飞行时会受到风力的影响,容易出现脱线飞行问题,影响锁线飞行的可靠性;而且无人机本体在飞行时其和电力线路之间的距离不可控,故而容易出现撞线和擦线的问题,不仅容易损坏锁线飞行的无人机而且还会损坏电力线路。
2、为此,本发明提供了一种电力线路无人机锁线飞行系统。
技术实现思路
1、本发明的目的在于:为了解决背景技术中提到的问题,而提出的一种电力线路无人机锁线飞行系统。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种电力线路无人机锁线飞行系统,包括无人机本体,所述无人机本体的底部设置有稳定模块,所述稳定模块的底部设置有线路触压模块,所述稳定模块和线路触压模块之间设置有压力传感器,所述稳定模块包括方形载板、位于方形载板边角处的升降组合旋翼、横向滑动连接在方形载板两端的衔接滑板、位于衔接滑板两端的控制电机、连接相邻的升降组合旋翼和控制电机的传动组合以及位于方形载板底部的悬挂杆,该悬挂杆用于连接线路触压模块,当所述方形载板倾斜时,在衔接滑板和传动组合的作用下,升降组合旋翼对方形载板施加反倾斜的推力。
4、作为上述技术方案的进一步描述:
5、所述升降组合旋翼包括上升旋翼和下降旋翼,所述上升旋翼和下降旋翼上分别固定连接有和方形载板转动连接的上升传动轴和下降传动轴,所述上升传动轴和下降传动轴为平行设置。
6、作为上述技术方案的进一步描述:
7、所述传动组合包括上圆锥轮、中传动盘和下圆锥轮,所述上圆锥轮的小端和上升传动轴的底部固定连接,所述下圆锥轮的大端和下降传动轴的底部固定连接,所述中传动盘与上圆锥轮和下圆锥轮的外锥壁相抵且和控制电机的输出轴轴向滑动配合。
8、作为上述技术方案的进一步描述:
9、所述方形载板两端的底部固定连接有和衔接滑板滑动连接的限位块,所述衔接滑板的两端固定连接有和控制电机固定连接的悬臂,所述中传动盘的外周包覆有一圈增阻胶垫。
10、作为上述技术方案的进一步描述:
11、所述线路触压模块包括触压机构和触压槽轮,所述触压机构的顶部和悬挂杆连接且底部和所述触压槽轮连接,该触压槽轮的回转轴线和衔接滑板的滑动方向平行。
12、作为上述技术方案的进一步描述:
13、所述触压机构包括托梁、双向伸缩压杆、摆臂和压簧,所述双向伸缩压杆上固定杆的中部和悬挂杆轴向滑动配合,所述压簧套设在悬挂杆上且位于固定杆和方形载板之间,所述托梁顶部中部和悬挂杆的底部固定连接且其两端和摆臂的一侧转动连接,所述摆臂的底部和触压槽轮转动连接且其顶部和双向伸缩压杆的动作杆的一端铰接连接。
14、作为上述技术方案的进一步描述:
15、所述压力传感器固定设置在方形载板的底部且和压簧的顶部相抵。
16、作为上述技术方案的进一步描述:
17、所述悬挂杆的数量为两个且两者所在的平面和衔接滑板垂直。
18、综上所述,由于采用了上述技术方案,本发明的有益效果是:
19、1、本发明中,通过在无人机本体底部设置稳定模块,该稳定模块上设置有升降组合旋翼和控制升降组合旋翼差速旋转的衔接滑板、控制电机和传动组合,该种设置使得无人机本体飞行时有效消除外力的影响,确保无人机本体可靠锁线飞行。
20、2、本发明中,通过在稳定模块的底部设置线路触压模块,线路触压模块包括触压机构和触压槽轮,其中稳定模块上底部还设置有压力传感器,该种设置使得无人机本体在锁线飞行时能对电力线路施加一定的挤压力,使得无人机本体沿着电力线路稳定飞行,也就是说具有提高无人机本体锁线飞行稳定性的优点。
技术特征:
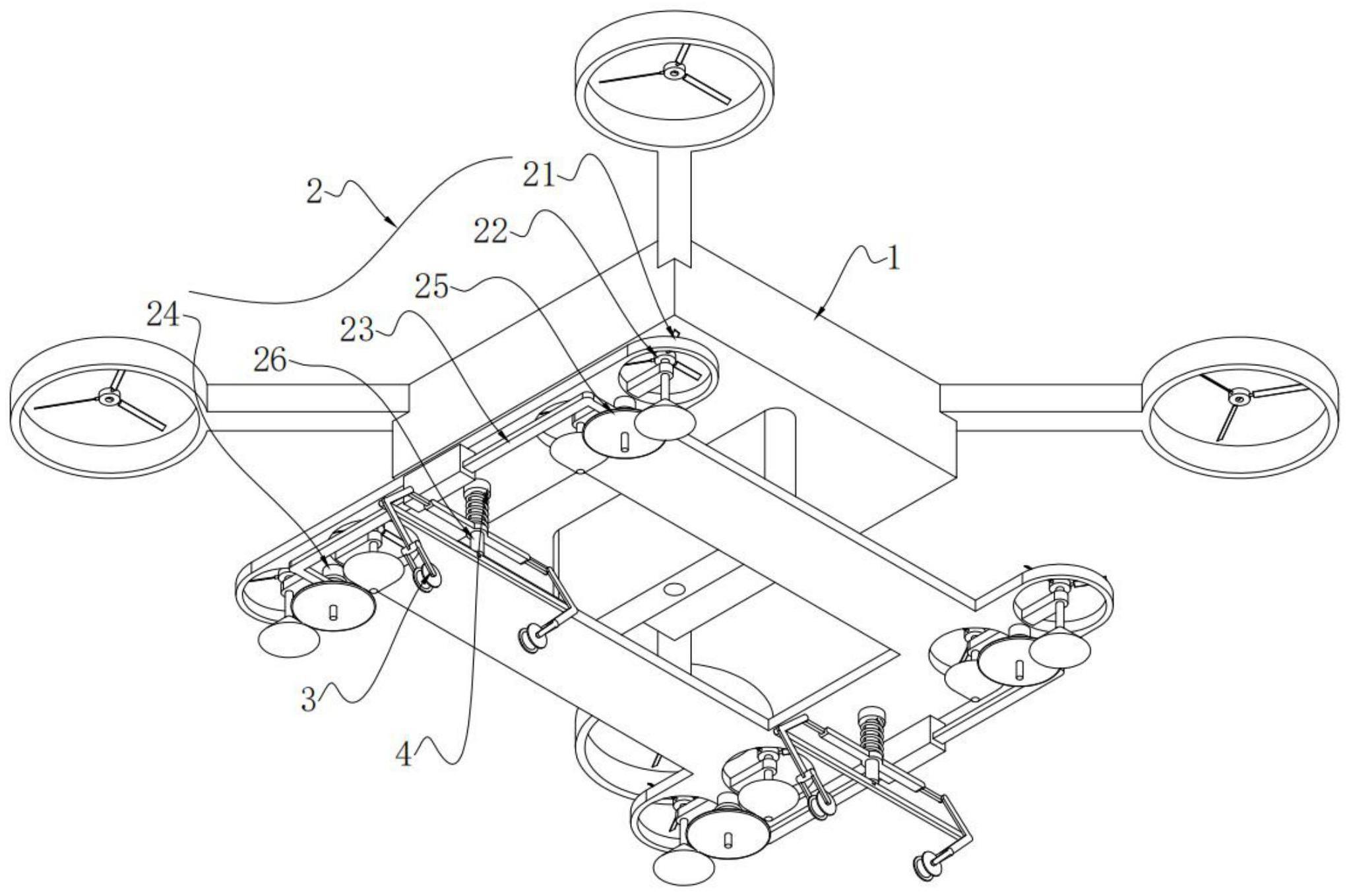
1.一种电力线路无人机锁线飞行系统,其特征在于,包括无人机本体(1),所述无人机本体(1)的底部设置有稳定模块(2),所述稳定模块(2)的底部设置有线路触压模块(3),所述稳定模块(2)和线路触压模块(3)之间设置有压力传感器(4),所述稳定模块(2)包括方形载板(21)、位于方形载板(21)边角处的升降组合旋翼(22)、横向滑动连接在方形载板(21)两端的衔接滑板(23)、位于衔接滑板(23)两端的控制电机(24)、连接相邻的升降组合旋翼(22)和控制电机(24)的传动组合(25)以及位于方形载板(21)底部的悬挂杆(26),该悬挂杆(26)用于连接线路触压模块(3),当所述方形载板(21)倾斜时,在衔接滑板(23)和传动组合(25)的作用下,升降组合旋翼(22)对方形载板(21)施加反倾斜的推力。
2.根据权利要求1所述的一种电力线路无人机锁线飞行系统,其特征在于,所述升降组合旋翼(22)包括上升旋翼(221)和下降旋翼(222),所述上升旋翼(221)和下降旋翼(222)上分别固定连接有和方形载板(21)转动连接的上升传动轴(2211)和下降传动轴(2221),所述上升传动轴(2211)和下降传动轴(2221)为平行设置。
3.根据权利要求2所述的一种电力线路无人机锁线飞行系统,其特征在于,所述传动组合(25)包括上圆锥轮(251)、中传动盘(252)和下圆锥轮(253),所述上圆锥轮(251)的小端和上升传动轴(2211)的底部固定连接,所述下圆锥轮(253)的大端和下降传动轴(2221)的底部固定连接,所述中传动盘(252)与上圆锥轮(251)和下圆锥轮(253)的外锥壁相抵且和控制电机(24)的输出轴轴向滑动配合。
4.根据权利要求3所述的一种电力线路无人机锁线飞行系统,其特征在于,所述方形载板(21)两端的底部固定连接有和衔接滑板(23)滑动连接的限位块(211),所述衔接滑板(23)的两端固定连接有和控制电机(24)固定连接的悬臂(231),所述中传动盘(252)的外周包覆有一圈增阻胶垫。
5.根据权利要求1所述的一种电力线路无人机锁线飞行系统,其特征在于,所述线路触压模块(3)包括触压机构(31)和触压槽轮(32),所述触压机构(31)的顶部和悬挂杆(26)连接且底部和所述触压槽轮(32)连接,该触压槽轮(32)的回转轴线和衔接滑板(23)的滑动方向平行。
6.根据权利要求5所述的一种电力线路无人机锁线飞行系统,其特征在于,所述触压机构(31)包括托梁(311)、双向伸缩压杆(312)、摆臂(313)和压簧(314),所述双向伸缩压杆(312)上固定杆的中部和悬挂杆(26)轴向滑动配合,所述压簧(314)套设在悬挂杆(26)上且位于固定杆和方形载板(21)之间,所述托梁(311)顶部中部和悬挂杆(26)的底部固定连接且其两端和摆臂(313)的一侧转动连接,所述摆臂(313)的底部和触压槽轮(32)转动连接且其顶部和双向伸缩压杆(312)的动作杆的一端铰接连接。
7.根据权利要求6所述的一种电力线路无人机锁线飞行系统,其特征在于,所述压力传感器(4)固定设置在方形载板(21)的底部且和压簧(314)的顶部相抵。
8.根据权利要求6所述的一种电力线路无人机锁线飞行系统,其特征在于,所述悬挂杆(26)的数量为两个且两者所在的平面和衔接滑板(23)垂直。
技术总结
本发明公开了一种电力线路无人机锁线飞行系统,包括无人机本体,所述无人机本体的底部设置有稳定模块,所述稳定模块的底部设置有线路触压模块,所述稳定模块和线路触压模块之间设置有压力传感器,所述稳定模块包括方形载板、位于方形载板边角处的升降组合旋翼、横向滑动连接在方形载板两端的衔接滑板、位于衔接滑板两端的控制电机、连接相邻的升降组合旋翼和控制电机的传动组合以及位于方形载板底部的悬挂杆。本发明中,通过在无人机本体底部设置稳定模块,该稳定模块上设置有升降组合旋翼和控制升降组合旋翼差速旋转的衔接滑板、控制电机和传动组合,该种设置使得无人机本体飞行时有效消除外力的影响,确保无人机本体可靠锁线飞行。
技术研发人员:王隽,刘金虎,刘穗秋,贾泽,袁奋,张超,王海松,曾杨,黄燕,肖嵘,牛晓枫,李多伦,黄兴海,程斌
受保护的技术使用者:国网湖北省电力有限公司神农架供电公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!